数学建模——线性规划类
一.线性规划
1.算法
【1】通用代码
[x,y]=linprog(c,A,b,Aeq,beq,lb,ub)
例如:
max需要加负号变成min、>=需要加负号变成<=

matlab
(1)基于求解器
% LP1_1_1.m
f=[-2;-3;5];
a=[-2,5,-1;1,3,1];b=[-10;12];
aeq=[1,1,1];beq=7;
[x,y]=linprog(f,a,b,aeq,beq,zeros(3,1));
x,y=-y %最大值
x =
6.4286
0.5714
0
y =
14.5714
% 说明:在x1 x2 x3 = 6.4286 0.5714 0 的情况下,maxz = 14.5714(2)基于问题
con中根据符号分类
% LP1_1_2.m
clc,clear
prob=optimproblem('ObjectiveSense','max')
x=optimvar('x',3,'LowerBound',0);
prob.Objective=2*x(1)+3*x(2)-5*x(3);
prob.Constraints.con1=x(1)+x(2)+x(3)==7;
prob.Constraints.con2=2*x(1)-5*x(2)+x(3)>=10;
prob.Constraints.con3=x(1)+3*x(2)+x(3)<=12;
[sol,fval,flag,out]=solve(prob),sol,x;
x=sol.x,y=fvalpython
# 线性规划模型.py
from scipy.optimize import linprog
import numpy as np
c=np.array([-2,-3,5])
a=[[-2,5,-1],[1,3,1]]
b=[[-10],[12]]
aeq=[[1,1,1]]
beq=[7]
lb=[0,0,0]
ub=[None]*len(c)
bound=tuple(zip(lb,ub))
res=linprog(c,a,b,aeq,beq,bound,method='simplex',options={"disp":True})
print("最优解:",res.x)
print("目标函数最小值:",res.fun)
print("目标函数最大值:",-res.fun)
print(res)
最优解: [6.42857143 0.57142857 0. ]
目标函数最小值: -14.571428571428571
目标函数最大值: 14.571428571428571
con: array([0.])
fun: -14.571428571428571
message: 'Optimization terminated successfully.'
nit: 3
slack: array([0. , 3.85714286])
status: 0
success: True
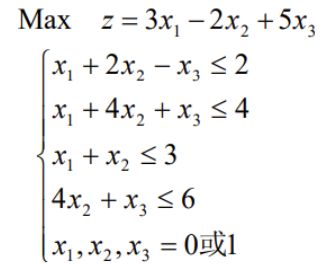
x: array([6.42857143, 0.57142857, 0. ])【2】可以转化为线性规划
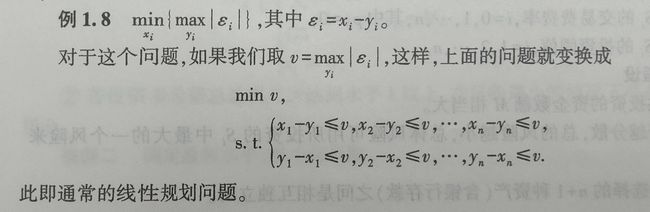
(1)绝对值


% LP_abs.m
clc,clear
c=[1,2,3,4]';
a=[1,-1,-1,1;1,-1,1,-3;1,-1,-2,3];
b=[-2,-1,-1/2]';
prob=optimproblem;
u=optimvar('u',4,'LowerBound',0);
v=optimvar('v',4,'LowerBound',0);
prob.Objective=sum(c'*(u+v));
prob.Constraints.con=a*(u-v)<=b;
[sol,fval,flag,out]=solve(prob)
x=sol.u-sol.v,minz=fval
x =
-2
0
0
0
minz =
2.0000(2)min(max(q*x))
(见风投案例模型二)
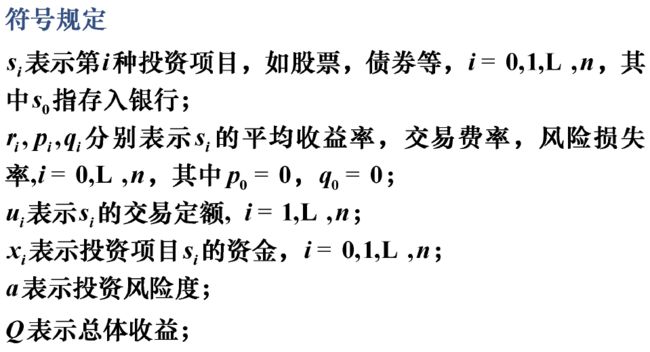
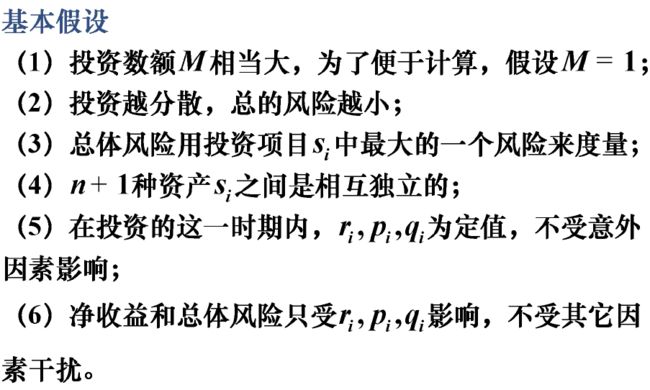
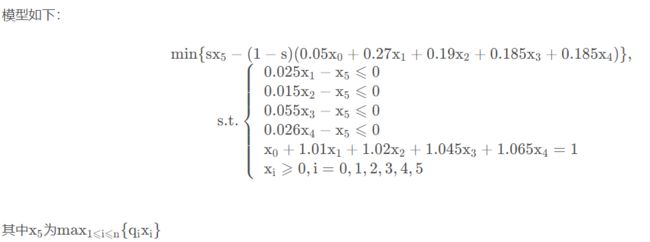
2.风投案例
【0】题目描述
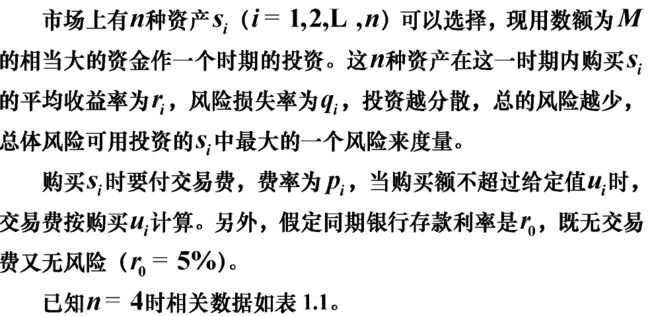
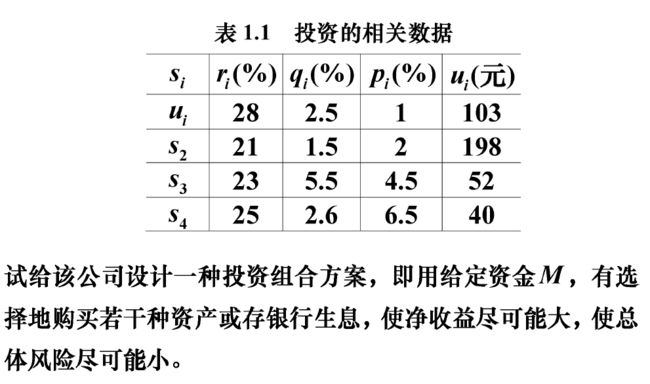
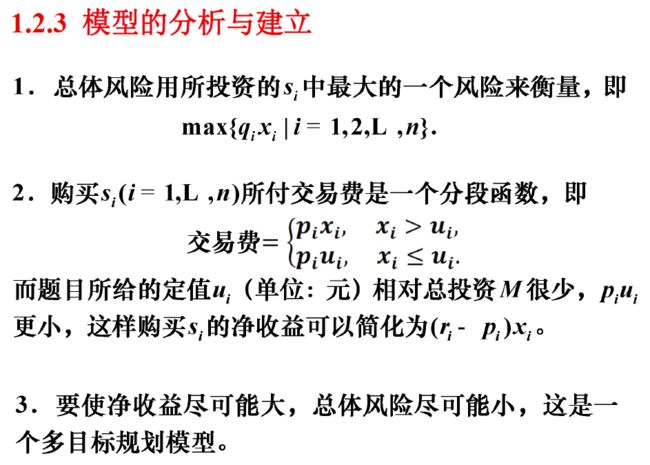

【1】模型一
模型一:设定风险度的最大接受值,在不太冒险的情况下选择最大收益。
(1)matlab
% LP_fengtou_1.m
clc,clear
t=0;hold on
while t<0.05
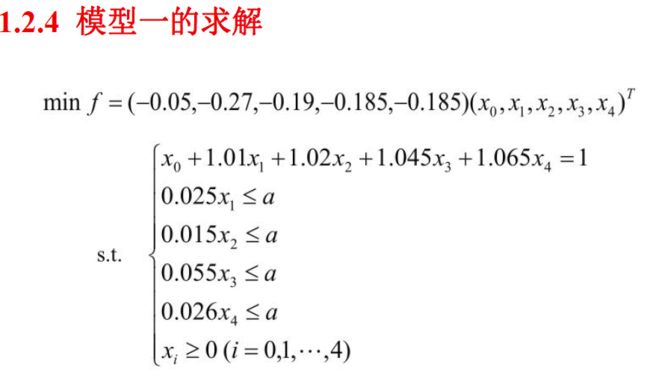
c=[-0.05,-0.27,-0.19,-0.185,-0.185];
A=[zeros(4,1),diag([0.025,0.015,0.055,0.026])];
b=t*ones(4,1);
Aeq=[1,1.01,1.02,1.045,1.065];beq=1;
lb=zeros(5,1);
[x,Q]=linprog(c,A,b,Aeq,beq,lb);
Q=-Q;
plot(t,Q,'*k');
t=t+0.001;
end
xlabel('t'),ylabel('Q')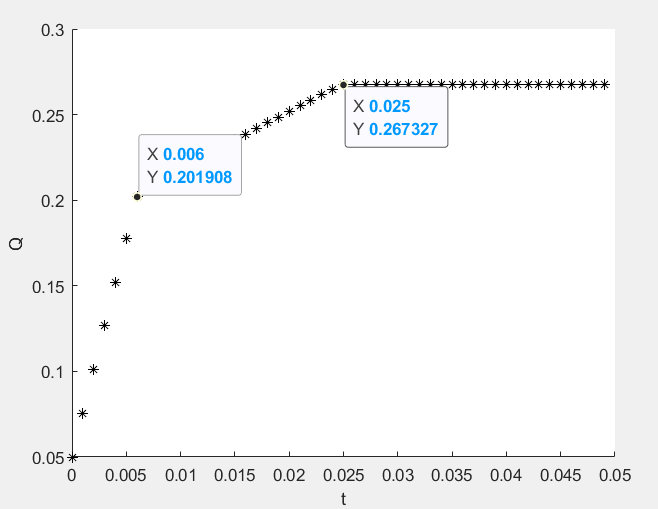
选择曲线的转折点作为最优投资组合。
输出转折点见模型一python代码:
鼠标在图上确定大致坐标,在循环中加入条件输出。
(2)python
# 风投案例.py
from scipy.optimize import linprog
import numpy as np
from numpy import ones,diag,c_,zeros
import matplotlib.pyplot as plt
plt.rc('font',size=16)
c=np.array([-0.05,-0.27,-0.19,-0.185,-0.185])
A=c_[zeros(4),diag([0.025,0.015,0.055,0.026])]
Aeq=[[1,1.01,1.02,1.045,1.065]]
beq=[1]
a=0
aa=[]
ss=[]
while a<0.05:
b=ones(4)*a
res = linprog(c, A, b, Aeq, beq)
x=res.x
Q=-res.fun
aa.append(a)
ss.append(Q)
#输出转折点
if a==0.006:
print("x=", x)
print("Q=", Q)
a=a+0.001
plt.plot(aa,ss,'r*')
plt.xlabel('$a$')
plt.ylabel('$Q$',rotation=90)
plt.savefig('模型一.png',dpi=500)
plt.show()
x= [0. 0.24 0.4 0.10909091 0.22122066]
Q= 0.20190763977806234(万元)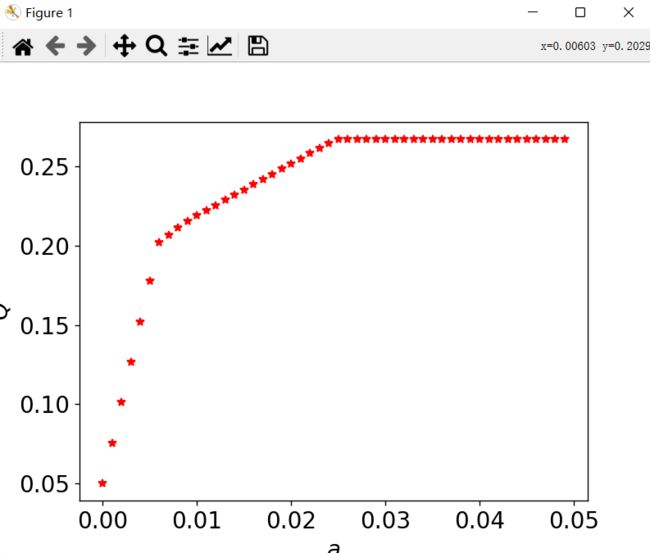
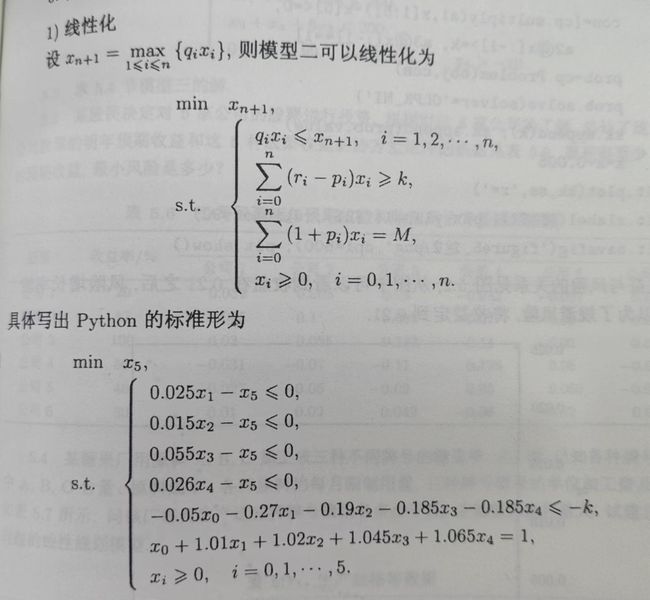
【2】模型二

模型二的目标函数:使各项目中风险最大的一项风险最小。
import numpy as np
import matplotlib.pyplot as plt
import cvxpy as cp
plt.rc('font',size=16)
x=cp.Variable(6,pos=True)
obj=cp.Minimize(x[5])
a1=np.array([0.025,0.015,0.055,0.026])
a2=np.array([0.05,0.27,0.19,0.185,0.185])
a3=np.array([1,1.01,1.02,1.045,1.065])
k=0.05
kk=[]
ss=[]
while k<0.27:
con=[cp.multiply(a1,x[1:5])-x[5]<=0,
0.05*x[0]+0.27*x[1]+0.19*x[2]+0.185*x[3]+0.185*x[4]>=k,
x[0]+1.01*x[1]+1.02*x[2]+1.045*x[3]+1.065*x[4]==1]
prob=cp.Problem(obj,con)
prob.solve(solver='CVXOPT')
#输出转折点
if abs(k-0.21)<0.0005:
print("x=",x.value)
print("风险=",prob.value)
kk.append(k)
ss.append(prob.value)
k=k+0.005
plt.plot(kk,ss,'r*')
plt.xlabel('$k$')
plt.ylabel('$R$',rotation=90)
plt.savefig('模型二.png',dpi=500)
plt.show()
x= [2.09147087e-08 3.08874349e-01 5.14790372e-01 1.40396702e-01
1.52452147e-02 7.72185738e-03]
风险= 0.00772185738406626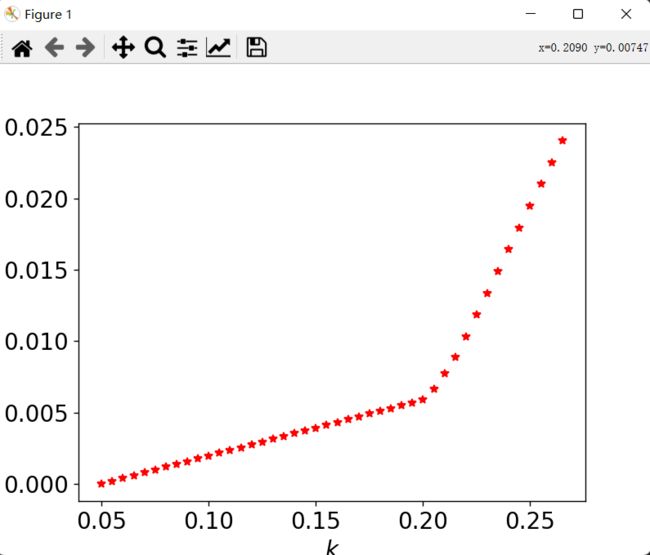
【3】模型三
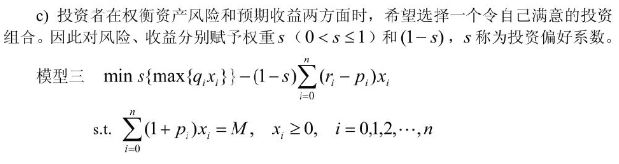
模型三:风险与收益的加权线性组合。
(1)matlab
clc,clear
M=10000;prob=optimproblem;
x=optimvar('x',6,1,'LowerBound',0);
r=[0.05,0.28,0.21,0.23,0.25];
p=[0,0.01,0.02,0.045,0.065];
q=[0,0.025,0.015,0.055,0.026]';
%w=0:0.1:1;
w=[0.766,0.767,0.810,0.811,0.824,0.825,0.962,0.963,1.0];
V=[];%风险
Q=[];%收益
X=[];%最优解
prob.Constraints.con1=(1+p)*x(1:end-1)==M;
prob.Constraints.con2=q(2:end).*x(2:end-1)<=x(end);
for i=1:length(w)
prob.Objective=w(i)*x(end)-(1-w(i))*(r-p)*x(1:end-1);
[sol,fval,flag,out]=solve(prob);
xx=sol.x;
V=[V,max(q.*xx(1:end-1))];
Q=[Q,(r-p)*xx(1:end-1)];
X=[X;xx'];
plot(V,Q,'*-');grid on
xlabel('风险');ylabel('收益')
X
end
V,Q,format
w=(权重)
[0.766, 0.767, 0.810, 0.811, 0.824, 0.825, 0.962, 0.963, 1.0];
V =(风险)
247.5248 92.2509 92.2509 78.4929 78.4929 59.3960 59.3960 0 0
Q =(收益)
1.0e+03 *
2.6733 2.1648 2.1648 2.1060 2.1060 2.0162 2.0162 0.5000 0.5000
X =
1.0e+04 *
0 0.9901 0 0 0 0.0248
0 0.3690 0.6150 0 0 0.0092
0 0.3690 0.6150 0 0 0.0092
0 0.3140 0.5233 0.1427 0 0.0078
0 0.3140 0.5233 0.1427 0 0.0078
0 0.2376 0.3960 0.1080 0.2284 0.0059(转折点处的X值)
0 0.2376 0.3960 0.1080 0.2284 0.0059
1.0000 0 0 0 0 0
1.0000 0 0 0 0 0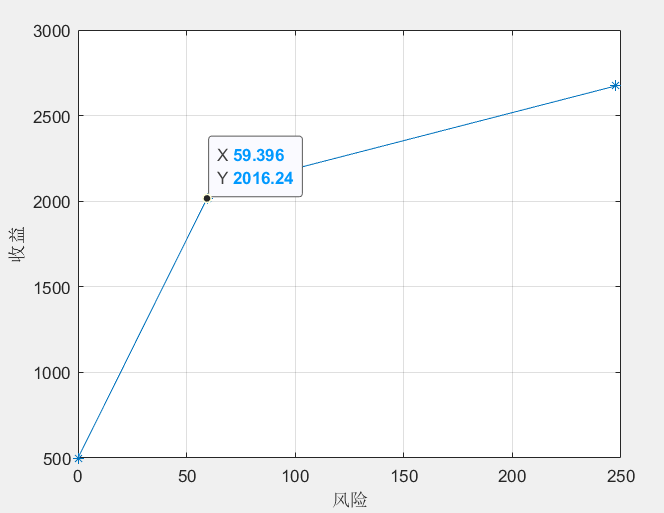
(2)python
from scipy.optimize import linprog
import matplotlib.pyplot as plt
plt.rc('font',size=16)
A=[[0,0.025,0,0,0,-1],[0,0,0.15,0,0,-1],[0,0,0,0.55,0,-1],[0,0,0,0,0.026,-1]]
b=[0,0,0,0]
Aeq=[[1,1.01,1.02,1.045,1.065,0]]
beq=[1]
bound=((0,None),(0,None),(0,None),(0,None),(0,None),(0,None))
s=0;ss=[];aa=[]
while s<=1:
c=[-(1-s)*0.05,-(1-s)*0.27,-(1-s)*0.19,-(1-s)*0.185,-(1-s)*0.185,s]
res=linprog(c,A,b,Aeq,beq)
ss.append(s);aa.append(-res.fun)
s=s+0.01
plt.plot(ss,aa,'r.')
plt.show()import matplotlib.pyplot as plt
import cvxpy as cp
import numpy as np
plt.rc('font',size=16)
x=cp.Variable(6)
a1=np.array([0.025,0.015,0.055,0.026])
a2=np.array([0.05,0.27,0.19,0.185,0.185])
a3=np.array([1,1.01,1.02,1.045,1.065])
con=[cp.multiply(a1,x[1:5])-x[5]<=0,a3@x[:-1]==1,x>=0]
s=0;ss=[];aa=[]
while s<=1:
obj=cp.Minimize(s*x[-1]-(1-s)*a2@x[:-1])
prob=cp.Problem(obj,con)
prob.solve(solver='GLPK_MI')
ss.append(s);aa.append(-prob.value)
s=s+0.01
plt.plot(ss,aa,'r.')
plt.show()
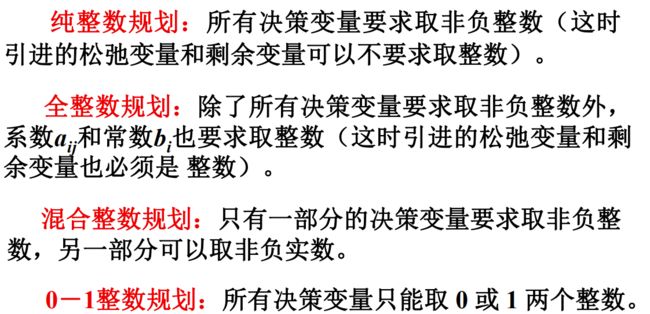
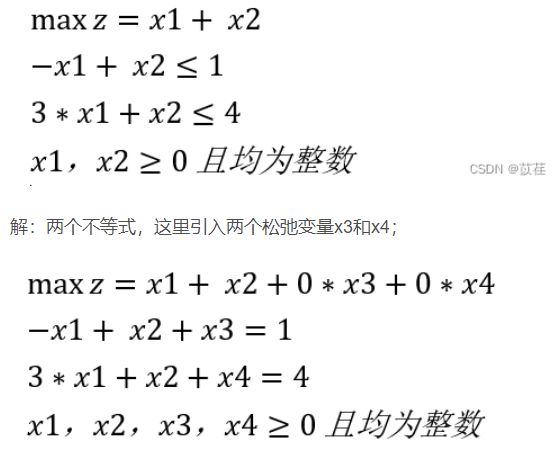
二.整数规划
0.分类
1.通用代码
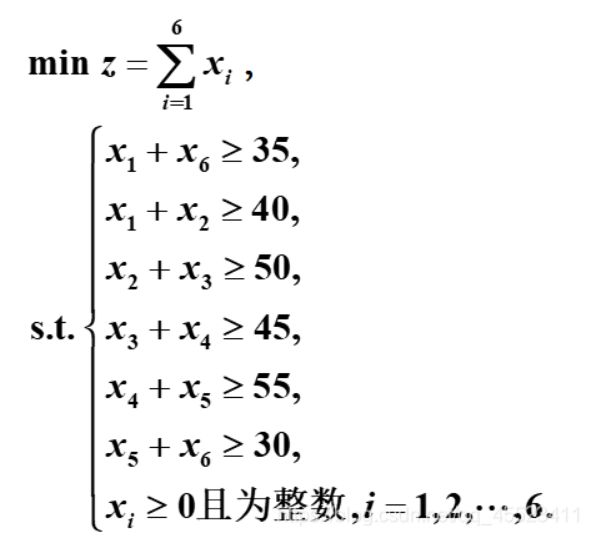
% int_LP_1.m
clc,clear,prob=optimproblem;
x=optimvar('x',6,'Type','integer','LowerBound',0);
prob.Objective=sum(x);
% 创建一个由空优化约束组成的 6×1 数组,使用 constr 初始化用于创建约束表达式的循环
coon=optimconstr(6);
a=[35,40,50,45,55,30];
con(1)=x(1)+x(6)>=35;
for i=1:5
con(i+1)=x(i)+x(i+1)>=a(i+1);
end
prob.Constraints.con=con;
[sol,fval,flag]=solve(prob)
x=sol.x
x =
35
5
45
0
55
0intlinprog函数
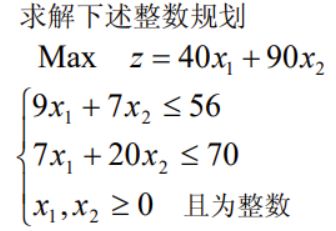
x = intlinprog(f,intcon,A,b,Aeq,beq,lb,ub):函数相比linprog多了一个参数intcon,用于标定整数变量的位置:x1、x2为整数,即intcon = [1 2]
% int_LP_intlinprog.m
c = [-40;-90];
A = [9,7;7,20];
b = [56;70];
[x,fval] = intlinprog(c,[1 2],A,b,[],[],zeros(2,1));
x,maxz=-fval
x =
4.0000
2.0000
maxz =
3402.分支定界法(剪枝)

尝试一维单调
% int_branchbunch.m
clear global;
clear;
clc;
global result; % 存储所有整数解
global lowerBound; % 下界
global upperBound; % 上界
global count; % 用以判断是否为第一次分支
count = 1;
f = [-40, -90];
A = [8, 7;7, 20;];
b = [56; 70];
Aeq = [];
beq = [];
lbnd = [0; 0];
ubnd = [inf; inf];
% f = [-3 2 -5];
% A = [1 2 -1;1 4 1;1 1 0;0 4 1];
% b = [2;4;3;6];
% Aeq = [];
% beq = [];
% lbnd=[0 0 0];
% ubnd=[1 1 1];
BinTree = createBinTreeNode({f, A, b, Aeq, beq, lbnd, ubnd});
if ~isempty(result)
[fval,flag]=min(result(:,end)); % result中每一行对应一个整数解及对应的函数值
Result=result(flag,:);
disp('该整数规划问题的最优解为:');
disp(Result(1,1:end-1));
disp('该整数规划问题的最优值为:');
disp(Result(1,end));
else
disp('该整数规划问题无可行解');
end
function BinTree = createBinTreeNode(binTreeNode)
global result;
global lowerBound;
global upperBound;
global count;
if isempty(binTreeNode)
return;
else
BinTree{1} = binTreeNode;
BinTree{2} = [];
BinTree{3} = [];
[x, fval, exitflag] = linprog(binTreeNode{1}, binTreeNode{2}, binTreeNode{3}, ...
binTreeNode{4}, binTreeNode{5}, binTreeNode{6}, binTreeNode{7});
if count == 1
% upperBound = 0; % 初始下界为空
lowerBound = fval;
count = 2;
end
if ~IsInRange(fval)
return;
end
if exitflag == 1
flag = [];
% 寻找非整数解分量
for i = 1 : length(x)
if round(x(i)) ~= x(i)
flag = i;
break;
end
end
% 分支
if ~isempty(flag)
lowerBound = max([lowerBound; fval]);
OutputLowerAndUpperBounds();
lbnd = binTreeNode{6};
ubnd = binTreeNode{7};
lbnd(flag, 1) = ceil(x(flag, 1)); % 朝正无穷四舍五入
ubnd(flag, 1) = floor(x(flag, 1));
% 进行比较,优先选择目标函数较大的进行分支
[~, fval1] = linprog(binTreeNode{1}, binTreeNode{2}, binTreeNode{3}, ...
binTreeNode{4}, binTreeNode{5}, binTreeNode{6}, ubnd);
[~, fval2] = linprog(binTreeNode{1}, binTreeNode{2}, binTreeNode{3}, ...
binTreeNode{4}, binTreeNode{5}, lbnd, binTreeNode{7});
if fval1 < fval2
% 创建左子树
BinTree{2} = createBinTreeNode({binTreeNode{1}, binTreeNode{2}, binTreeNode{3}, ...
binTreeNode{4}, binTreeNode{5}, binTreeNode{6}, ubnd});
% 创建右子树
BinTree{3} = createBinTreeNode({binTreeNode{1}, binTreeNode{2}, binTreeNode{3}, ...
binTreeNode{4}, binTreeNode{5}, lbnd, binTreeNode{7}});
else
% 创建右子树
BinTree{3} = createBinTreeNode({binTreeNode{1}, binTreeNode{2}, binTreeNode{3}, ...
binTreeNode{4}, binTreeNode{5}, lbnd, binTreeNode{7}});
% 创建左子树
BinTree{2} = createBinTreeNode({binTreeNode{1}, binTreeNode{2}, binTreeNode{3}, ...
binTreeNode{4}, binTreeNode{5}, binTreeNode{6}, ubnd});
end
else
upperBound = min([upperBound; fval]);
OutputLowerAndUpperBounds();
result = [result; [x', fval]];
return;
end
else
% 剪枝
return;
end
end
end
function y = IsInRange(fval)
global lowerBound;
global upperBound;
if isempty(upperBound) & fval >= lowerBound
y = 1;
else if (fval >= lowerBound & fval <= upperBound)
y = 1;
else
y = 0;
end
end
end
function y = OutputLowerAndUpperBounds()
global lowerBound;
global upperBound;
disp("此时下界、上界分别为");
disp(lowerBound);
if isempty(upperBound)
disp(' 无上界')
else
disp(upperBound);
end
end
该整数规划问题的最优解为:
4 2
该整数规划问题的最优值为:
-3403.割平面法
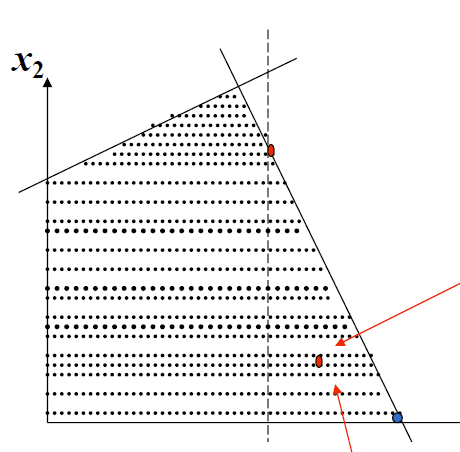
割去小数部分,尝试二维单调
function [intx,intf] = DividePlane(A,c,b,baseVector)
%功能:用割平面法求解整数规划
%调用格式:[intx,intf]=DividePlane(A,c,b,baseVector)
%其中, A:约束矩阵;
% c:目标函数系数向量;
% b:约束右端向量;
% baseVector:初始基向量;
% intx:目标函数取最值时的自变量值;
% intf:目标函数的最值;
sz = size(A);
nVia = sz(2);%获取有多少决策变量
n = sz(1);%获取有多少约束条件
xx = 1:nVia;
if length(baseVector) ~= n
disp('基变量的个数要与约束矩阵的行数相等!');
mx = NaN;
mf = NaN;
return;
end
M = 0;
sigma = -[transpose(c) zeros(1,(nVia-length(c)))];
xb = b;
%首先用单纯形法求出最优解
while 1
[maxs,ind] = max(sigma);
%--------------------用单纯形法求最优解--------------------------------------
if maxs <= 0 %当检验数均小于0时,求得最优解。
vr = find(c~=0 ,1,'last');
for l=1:vr
ele = find(baseVector == l,1);
if(isempty(ele))
mx(l) = 0;
else
mx(l)=xb(ele);
end
end
if max(abs(round(mx) - mx))<1.0e-7 %判断最优解是否为整数解,如果是整数解。
intx = mx;
intf = mx*c;
return;
else %如果最优解不是整数解时,构建切割方程
sz = size(A);
sr = sz(1);
sc = sz(2);
[max_x, index_x] = max(abs(round(mx) - mx));
[isB, num] = find(index_x == baseVector);
fi = xb(num) - floor(xb(num));
for i=1:(index_x-1)
Atmp(1,i) = A(num,i) - floor(A(num,i));
end
for i=(index_x+1):sc
Atmp(1,i) = A(num,i) - floor(A(num,i));
end
Atmp(1,index_x) = 0; %构建对偶单纯形法的初始表格
A = [A zeros(sr,1);-Atmp(1,:) 1];
xb = [xb;-fi];
baseVector = [baseVector sc+1];
sigma = [sigma 0];
%-------------------对偶单纯形法的迭代过程----------------------
while 1
%----------------------------------------------------------
if xb >= 0 %判断如果右端向量均大于0,求得最优解
if max(abs(round(xb) - xb))<1.0e-7
%如果用对偶单纯形法求得了整数解,则返回最优整数解
vr = find(c~=0 ,1,'last');
for l=1:vr
ele = find(baseVector == l,1);
if(isempty(ele))
mx_1(l) = 0;
else
mx_1(l)=xb(ele);
end
end
intx = mx_1;
intf = mx_1*c;
return;
else %如果对偶单纯形法求得的最优解不是整数解,继续添加切割方程
sz = size(A);
sr = sz(1);
sc = sz(2);
[max_x, index_x] = max(abs(round(mx_1) - mx_1));
[isB, num] = find(index_x == baseVector);
fi = xb(num) - floor(xb(num));
for i=1:(index_x-1)
Atmp(1,i) = A(num,i) - floor(A(num,i));
end
for i=(index_x+1):sc
Atmp(1,i) = A(num,i) - floor(A(num,i));
end
Atmp(1,index_x) = 0; %下一次对偶单纯形迭代的初始表格
A = [A zeros(sr,1);-Atmp(1,:) 1];
xb = [xb;-fi];
baseVector = [baseVector sc+1];
sigma = [sigma 0];
continue;
end
else %如果右端向量不全大于0,则进行对偶单纯形法的换基变量过程
minb_1 = inf;
chagB_1 = inf;
sA = size(A);
[br,idb] = min(xb);
for j=1:sA(2)
if A(idb,j)<0
bm = sigma(j)/A(idb,j);
if bm0
bz = xb(j)/A(j,ind);
if bz 
% int_LP_divideplane.m
c = [-1;-1]; % 不要加松弛变量
A = [-1 1 1 0;3 1 0 1]; % 加上松弛变量
b = [1;4];
[x,fval] = DividePlane(A,c,b,[3 4]); % 松弛变量 3 4
x,maxz=fval
x =
1.0000 1.0000
maxz =
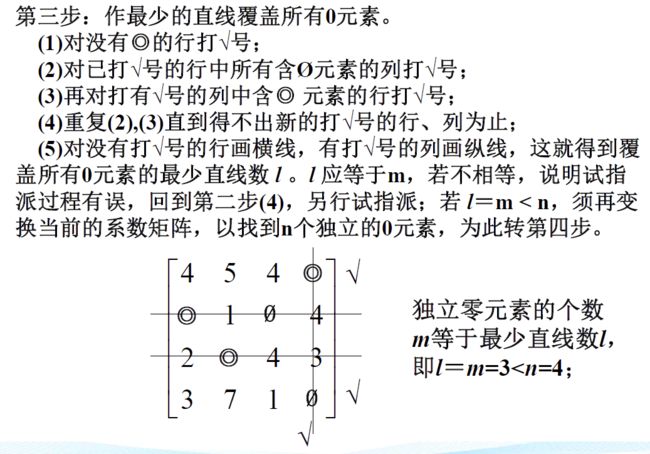
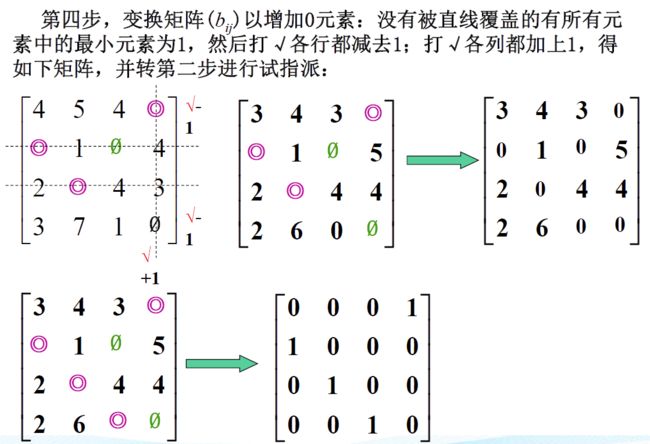
-24.匈牙利算法
【1】
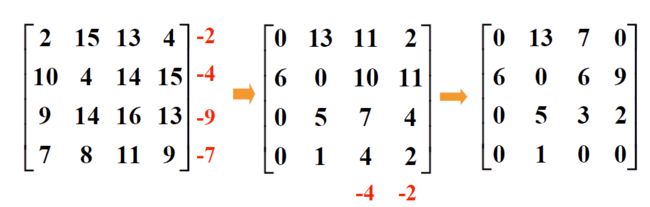
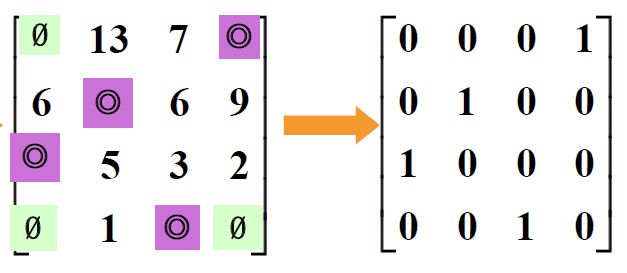
【2】

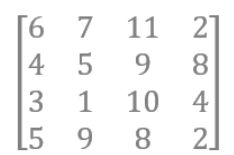
% int_XiongYaLi.m
c = [6 7 11 2;4 5 9 8;3 1 10 4;5 9 8 2];
a = zeros(8,16);
for i = 1:4
a(i,(i-1)*4+1:4*i) = 1;
a(4+i,i:4:16) = 1;
end
b = ones(8,1);
[x,y] = linprog(c,[],[],a,b,zeros(16,1),ones(16,1));
X = reshape(x,4,4)
opt = y
% X =
%
% 0 0 0 1
% 1 0 0 0
% 0 1 0 0
% 0 0 1 0
%
%
% opt =
%
% 15
A=[6 7 11 2;
4 5 9 8;
3 1 10 4;
5 9 8 2];
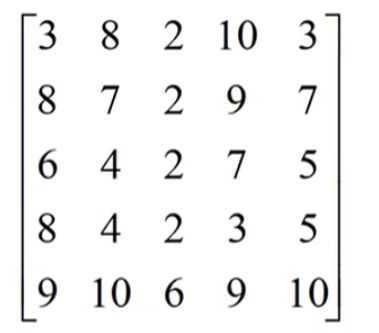
% A = [3 8 2 10 3;8 7 2 9 7;6 4 2 7 5;8 4 2 3 5;9 10 6 9 10];
B=Hungary(A);
[~,b]=linear_assignment(A,B)
% b =
% 4 1 8 2
function res=Hungary(N)
%输入的矩阵应N*N的
[a,~]=size(N);
%第一步每一行减去当前行最小值
for ii = 1:a
N(ii,:)= N(ii,:)-min( N(ii,:));
end
%第二步每一列减去当前列最小值
for ii = 1:a
N(:,ii)= N(:,ii)-min( N(:,ii));
end
num=0;
while num~=a
[num,N_min,del_hang,del_lie]=line_count(N);
if num ~=a
for ii=1:a
if del_hang(ii)~=ii
N(ii,:) = N(ii,:)-N_min;
end
if del_lie(ii)==ii
N(:,ii) = N(:,ii)+N_min;
end
end
else
res=N;
end
end
function [num,M_min,del_hang,del_lie]=line_count(M)
[a,~]=size(M);
num=0;
h=0;
del_hang=zeros(a,1);
del_lie=zeros(a,1);
for ii=1:a
del=ii-h;
[~,b]=size(find(M(del,:)==0));
if b>= 2
M(del,:)=[];
h=h+1;
del_hang(ii)=ii; %得到被覆盖的行数
num=num+1;
end
end
l=0;
for ii=1:a
del=ii-l;
[b,~]=size(find(M(:,del)==0));
if b >=1
M(:,del)=[];
l=l+1;
del_lie(ii)=ii; %得到被覆盖的列数
num=num+1;
end
end
M_min=min(min(M));
end
end
function [place,res]=linear_assignment(M,N)
%N是n维矩阵,N是经过Hungary处理的
%M是未处理前的
[a,~]=size(N);
x=0;
place=zeros(1,a);
res=zeros(1,a);
judge=zeros(1,a);
while find(N==0)
for ii=1:a
judge(ii)=length(find(N(ii,:)==0));
end
judge(find(judge==0))=[];
if min(judge)==1
for ii=1:a
if length(find(N(ii,:)==0))==1 %先选出行中只有1个0
x=x+1;
place(x)=ii+(find(N(ii,:)==0)-1)*a; %得到矩阵中的位置
h=find(N(ii,:)==0);
N(ii,:)=1./zeros(1,a);
N(:,h)=1./zeros(a,1);
end
end
end
for ii=1:a
judge(ii)=length(find(N(ii,:)==0));
end
judge(find(judge==0))=[];
if min(judge)==2
x=x+1;
q=find(N==0);
place(x)=q(1);
N(mod(q(1),a),:)=1./zeros(1,a);
N(:,fix(q(1)/a)+1)=1./zeros(a,1);
end
end
[place,~]=sort(place);
for ii=1:length(place)
res(ii)=M(place(ii));
end
end 5.0-1规划
【1】intlinprog函数
0-1规划问题也可以看做区间在[0,1]的整数规划,下面利用intlinprog函数进行计算
% intlinprog_01.m
c = [-3 2 -5]';
A = [1 2 -1;1 4 1;1 1 0;0 4 1];
b = [2;4;3;6];
[x,fval] = intlinprog(c,[1 2 3],A,b,[],[],zeros(3,1),ones(3,1));
x,maxz = -fval
x =
1
0
1
maxz =
8【2】指派问题
(1)纯0-1整数规划
c=np.array([[4,8,7,15,12],
[7,9,17,14,10],
[6,9,12,8,7],
[6,7,14,6,10],
[6,9,12,10,6]])
x=cp.Variable((5,5),integer=True)
obj=cp.Minimize(cp.sum(cp.multiply(c,x)))
con=[0<=x,x<=1,
cp.sum(x,axis=0,keepdims=True)==1,
cp.sum(x,axis=1,keepdims=True)==1]
prob=cp.Problem(obj,con)
prob.solve(solver='GLPK_MI')
print("最优值为:",prob.value)
print("最优解为:\n",x.value)
最优值为: 34.0
最优解为:
[[0. 0. 1. 0. 0.]
[0. 1. 0. 0. 0.]
[1. 0. 0. 0. 0.]
[0. 0. 0. 1. 0.]
[0. 0. 0. 0. 1.]](2)广义指派
5*x(1)+4*x(2)<=24+y(1)M; %M是充分大的数
7*x(1)+3*x(2)<=45+y(2)M;
y(1)+y(2)=1;i=1,2,3为三种生产方式
x(i)为产量;c(i)为每件产品的成本;k(i)为每种方式的固定成本
min z=(k(1)*y(1)+c(1)*x(1))+(k(2)*y(2)+c(2)*x(2))+(k(3)*y(3)+c(3)*x(3));
y(i)*m<=x(i)<=y(i)*M; %m充分小,M充分大
y(i)=0 or 1;【3】旅行商问题(TSP)
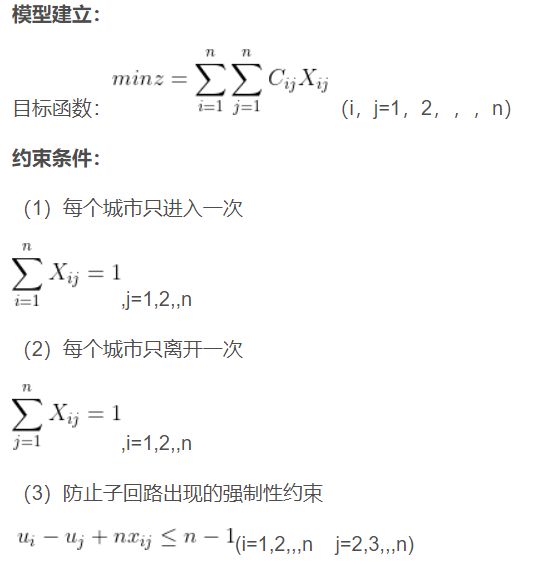
(司P31)比赛项目排序问题中,由于开始项目和结束项目没有连接,可引入虚拟项目15,与各项目的权重为0
三.非线性规划
- 算法
【1】二次规划
目标函数二次,约束条件线性
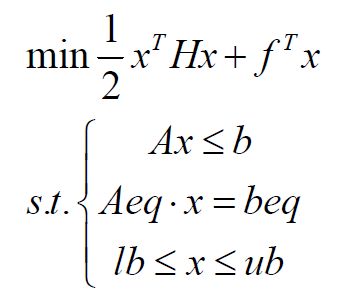
H为实对称矩阵
[x,fval]=quadprog(H,f,A,b,Aeq,beq,lb,ub,x0)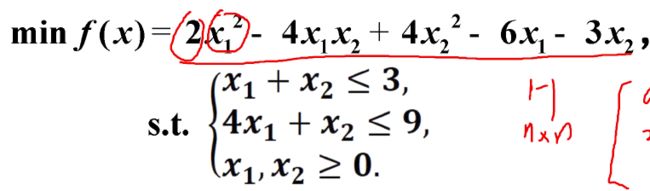
% DLP_1.m
H=[4,-4;-4,8];
f=[-6;3];
a=[1,1;4,1];
b=[3;9];
[x,fval]=quadprog(H,f,a,b,[],[],zeros(2,1))
x =
2.0854
0.6585
fval =
-5.5976% DLP_2.m
x0 = [1;1];
A=[1,1;4,1];
b=[3;9];
Aeq = [];
beq = [];
lb = [0;0];
[x,fval] = fmincon(@fun,x0,A,b,Aeq,beq,lb)
function f = fun(x)
f = 2*x(1)-4*x(1)*x(2)+4*x(2)^2-6*x(1)-3*x(2)
end
x =
2.0000
1.0000
fval =
-15.0000【2】无约束非线性规划
无约束优化问题有局部最优解的充分条件:梯度=0;Hesse矩阵正定
% NLP_nocon.m
clc,clear
f = @(x) x(1)^3-x(2)^3+3*x(1)^2+3*x(2)^2-9*x(1);
g = @(x) -f(x);
[m1,n1] = fminunc(f,[0,0])%求极小值
[m2,n2] = fminsearch(g,[0,0]);%求极大值
m2,n2=-n2
m1 =
1.0000 -0.0000
n1 =
-5
m2 =
-3.0000 2.0000
n2 =
31.0000【3】有约束非线性规划
% NLP_con_1.m
%[x,fval]=fmincon('fun1',x0,A,b,Aeq,beq,lb,ub,'fun2')
[x,y]=fmincon('fun1',rand(3,1),[],[],[],[],zeros(3,1),[],'fun2')
function f = fun1(x);
f=sum(x.^2)+8;
end
function [g,h] = fun2(x)
g=[-x(1)^2+x(2)-x(3)^2
x(1)+x(2)^2+x(3)^3-20];
h=[-x(1)-x(2)^2+2
x(2)+2*x(3)^2-3];
end
x =
0.5522
1.2033
0.9478
y =
10.6511% NLP_con_2.m
clc,clear
x = optimvar('x',3,'LowerBound',0);
prob = optimproblem('Objective',sum(x.^2)+8);
con1 = [-x(1)^2+x(2)-x(3)^2 <= 0
x(1)+x(2)^2+x(3)^3 <= 20];
con2 = [-x(1)-x(2)^2+2 == 0
x(2)+2*x(3)^2 == 3];
prob.Constraints.con1 = con1;
prob.Constraints.con2 = con2;
x0.x = rand(3,1);
[s,f,flag,out] = solve(prob,x0);
s.x,f(1)只有等式约束
拉格朗日法
(2)一般形式
罚函数法
不等式约束g(x,i)<=0 等式约束h(x,j)=0
不等式 g(x,i)<=0 转化为 等式 max(0,g(x,i))=0
罚函数:T(x.M)=f(x)+M*sum(max(0,g(x,i)))+M*sum(h(x,j)^2)【4】凸规划(f''>=0)
(1)判定:Hesse处处半正定

% NLP_TU.m
clc,clear
prob=optimproblem;
x=optimvar('x',2,'LowerBound',0);
prob.Objective=sum(x.^2)-4*x(1)+4;
con=[-x(1)+x(2)-2<=0
x(1)^2-x(2)+1<=0];
prob.Constraints.con=con;
x0.x=rand(2,1)
[sol,fval,flag,out]=solve(prob,x0),sol.x(2)K-T条件
只要是最优点,一定满足K-T条件
若为凸规划,则充要条件

【5】蒙特卡洛法
% MTKL.m
clc,clear
rng(0) %rng('shuffle')
p0=0;n=10^6;tic
for i=1:n
x=randi([0,99],1,5);
[f,g]=mengte(x);
if all(g<=0)
if p02.LINGO
model:
sets:
row/1..4/:b;
col/1..5/:c1,c2,x;
link(row,col):a;
endsets
data:
c1=1,1,3,4,2;
c2=-8,-2,-3,-1,-2;
a=1 1 1 1 1
1 2 2 1 6
2 1 6 0 0
0 0 1 1 5;
b=400,800,200,200;
enddata
max=@sum(col:c1*x^2+c2*x);
@for(row(i):@sum(col(j):a(i,j)*x(j))
3.案例+灵敏度分析
(司P42)
clc,clear,format long g,close all
syms x1 x2
f=(339-0.01*x1-0.003*x2)*x1+(399-0.004*x1-0.01*x2)*x2-(400000+195*x1+225*x2);
f=simplify(f);
f1=diff(f,x1);f2=diff(f,x2);
[x10,x20]=solve(f1,f2);
x10=round(double(x10));x20=round(double(x20));
f0=subs(f,{x1,x2},{x10,x20});
f0=double(f0);
subplot(121),fmesh(f,[0,10000,0,10000]),title('')
xlabel('$x_1$','Interpreter','latex')
ylabel('$X_2$','Interpreter','latex')
subplot(122),L=fcontour(f,[0,10000,0,10000]);
contour(L.XData,L.YData,L.ZData,'ShowText','on')
xlabel('$x_1$','Interpreter','latex')
ylabel('$X_2$','Interpreter','latex','Rotation',0)
p1=339-0.01*x10-0.003*x20
p2=399-0.004*x10-0.01*x20
c=400000+195*x10+225*x20 %总支出
rate=f0/c %利润
x10
x20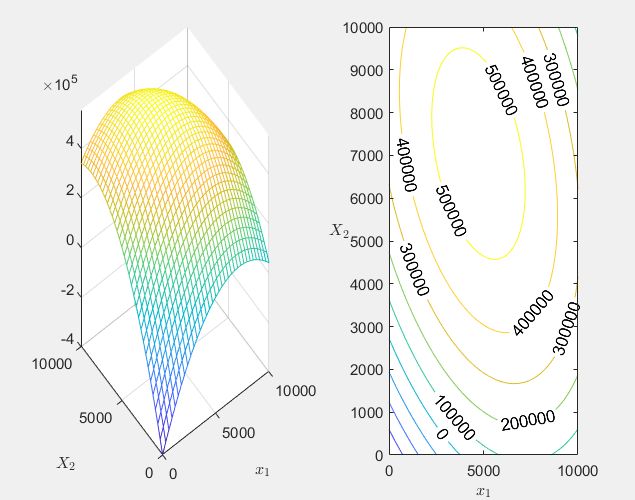
灵敏度分析
clc,clear,format long g,close all
syms x1 x2 a
f=(339-0.01*x1-0.003*x2)*x1+(399-0.004*x1-0.01*x2)*x2-(400000+195*x1+225*x2);
f=simplify(f);
f1=diff(f,x1);f2=diff(f,x2);
[x10,x20]=solve(f1,f2);
subplot(121),fplot(x10,[0.002,0.02]),title('') %x1关于a的曲线
xlabel('$x_1$','Interpreter','latex')
ylabel('$X_2$','Interpreter','latex','Rotation',0)
subplot(122),fplot(x20,[0.002,0.02]),title('') %x2关于a的曲线
xlabel('$x_1$','Interpreter','latex')
ylabel('$X_2$','Interpreter','latex','Rotation',0)
dx1=diff(x10,a);dx10=subs(dx1,a,0.01);dx10=double(dx10);
sx1a=dx10*0.01/4735;
dx2=diff(x20,a);dx20=subs(dx2,a,0.01);dx20=double(dx20);
sx2a=dx20*0.01/7043;
F=subs(f,{x1,x2},{x10,x20});
F=simplify(F);
figure,fplot(F,[0.002,0.02]),title('')
xlabel('$x_1$','Interpreter','latex')
ylabel('$X_2$','Interpreter','latex','Rotation',0)
Sya=-4735^2*0.01/553641;
f3=subs(f,{x1,x2,a},{4735,7043,0.011});
f3=double(f3);
f4=subs(F,a,0.011) %近似最优利润
f4=double(f4) %最优利润
delta=(f4-f3)/f4 %利润的相对误差四.多目标规划
1.多目标规划
max f1(x)=2x(1)+3x(2)
min f2(x)=x(1)+2x(2)
0.5x(1)+0.25x(2)<=8
0.2x(1)+0.2x(2)<=4
x(1)+x(2)>=10
x(1)>=0
x(2)>=0
【1】线性加权
min 0.5(-f1)+0.5(f2)
结果:
x(1)=7,x(2)=13
【2】理想点
分别求解得f1=-53,f2=10
新的目标函数 min f=[-2x(1)-3x(2)+53]^2+[x(1)+2x(2)-10]^2
结果:
x(1)=13.36,x(2)=5.28
【3】序贯
分别求解得f1=-53
加入条件-2x(1)-3x(2)=-53求f2
结果:
x(1)=7,x(2)=13
clc,clear,prob=optimproblem;
x=optimvar('x',2,'LowerBound',0);
c1=[-2,-3];c2=[1,2];
a=[0.5,0.25;0.2,0.2;1,5;-1,-1];
b=[8;4;72;-10];
prob.Constraints.con1=a*x<=b
obj1=0.5*c1*x+0.5*c2*x
prob1=prob;prob1.Objective=obj1;
[sol1,fval1]=solve(prob1),sx=sol1.x
f1=-c1*sx,f2=c2*sx
prob21=prob;prob21.Objective=c1*x;
[sol21,fval21]=solve(prob21),sx21=sol21.x
prob22=prob;prob22.Objective=c2*x;
[sol22,fval22]=solve(prob22),sx22=sol22.x
prob23=prob;
prob23.Objective=(c1*x-fval21)^2+(c2*x-fval22)^2;
[sol23,fval23]=solve(prob23),sx23=sol23.x
prob3=prob;prob3.Objective=c2*x;
prob3.Constraints.con2=c1*x==fval21;
[sol3,fval3]=solve(prob3),sx3=sol3.x2.目标规划
正负偏差变量
软硬约束
“尽量”
优先权
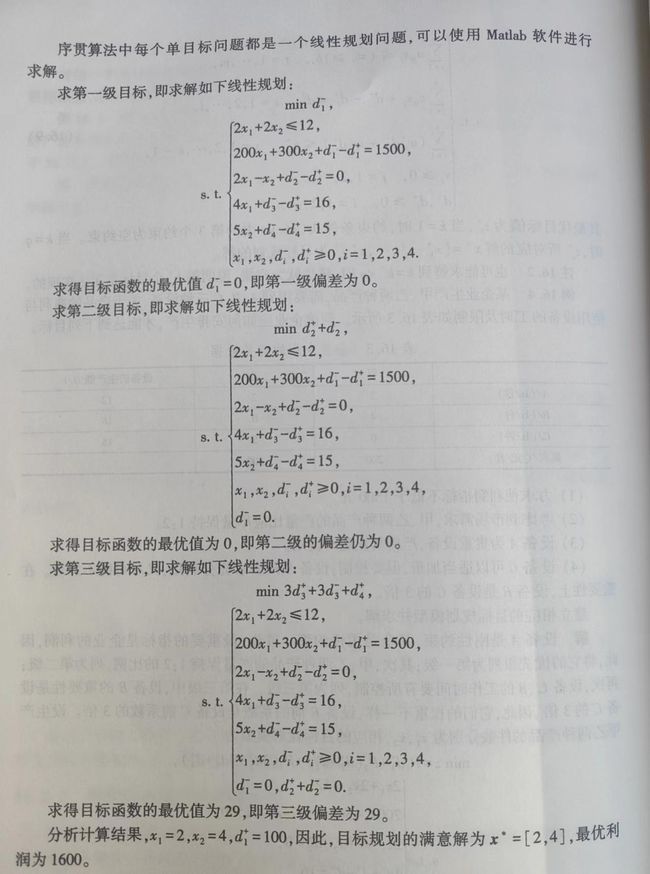
序贯算法:
根据优先级排序,将目标规划分解成一系列单目标规划,依次求解
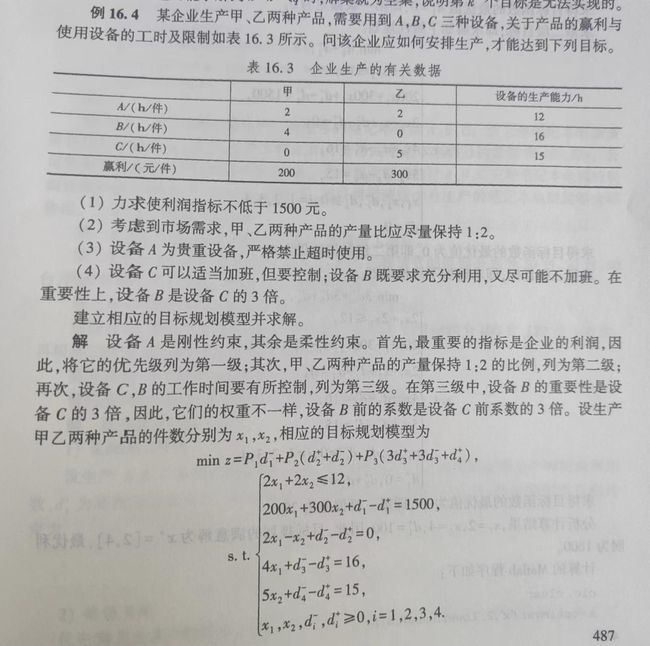
clc,clear
x=optimvar('x',2,'LowerBound',0);
dp=optimvar('dp',4,'LowerBound',0);
dm=optimvar('dm',4,'LowerBound',0);
p=optimproblem('ObjectiveSense','min');
p.Constraints.con1=2*sum(x)<=12;
con2=[200*x(1)+300*x(2)+dm(1)-dp(1)==1500
2*x(1)-x(2)+dm(2)-dp(2)==0
4*x(1)+dm(3)-dp(3)==16
5*x(2)+dm(4)-dp(4)==15];
p.Constraints.con2=con2;
goal=100000*ones(3,1);
mobj=[dm(1);dp(2)+dm(2);3*dp(3)+3*dm(3)+dp(4)];
for i=1:3
p.Constraints.con3=[mobj<=goal];
p.Objective=mobj(i);
[sx,fval]=solve(p);
fprintf('第%d级目标计算结果如下:\n',i)
fval,xx=sx.x,sdm=sx.dm,sdp=sx.dp
goal(i)=fval;
end