ROS学习——通信机制(常用命令)
2.4 常用命令 · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程088常用命令简介_Chapter2-ROS通信机制_哔哩哔哩_bilibili
机器人系统中启动的节点少则几个,多则十几个、几十个,不同的节点名称各异,通信时使用话题、服务、消息、参数等等都各不相同,一个显而易见的问题是: 当需要自定义节点和其他某个已经存在的节点通信时,如何获取对方的话题、以及消息载体的格式呢?
在 ROS 同提供了一些实用的命令行工具,可以用于获取不同节点的各类信息,常用的命令如下:
- rosnode : 操作节点
- rostopic : 操作话题
- rosservice : 操作服务
- rosmsg : 操作msg消息
- rossrv : 操作srv消息
- rosparam : 操作参数
作用
和之前介绍的文件系统操作命令比较,文件操作命令是静态的,操作的是磁盘上的文件,而上述命令是动态的,在ROS程序启动后,可以动态的获取运行中的节点或参数的相关信息。
案例演示(启动话题通信案例)
①

②使用自定义发布消息

②订阅
一、rosnode
rosnode 是用于获取节点信息的命令
rosnode ping 测试到节点的连接状态
rosnode list 列出活动节点
rosnode info 打印节点信息
rosnode machine 列出指定设备上节点
rosnode kill 杀死某个节点
rosnode cleanup 清除不可连接的节点
新窗口——rosnode

命令后加 -h显示帮助文档

![]() (1)rosnode list 列出活动节点
(1)rosnode list 列出活动节点


rosout——不是自己写的,启动roscore自动生成的节点
(2)rosnode ping 测试到节点的连接状态

(3)rosenode info 打印节点信息

(4)rosnode machine 列出指定设备上的节点

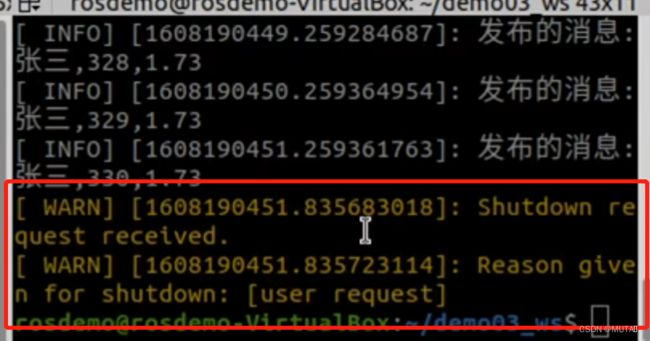
(5)rosnode kill 杀死某个节点

(6)rosnode cleanup 清除无用节点
启动乌龟节点,然后 ctrl + c 关闭,该节点并没被彻底清除,可以使用 cleanup 清除节点

二、rostopic
rostopic包含rostopic命令行工具,用于显示有关ROS 主题的调试信息,包括发布者,订阅者,发布频率和ROS消息。它还包含一个实验性Python库,用于动态获取有关主题的信息并与之交互。
rostopic bw 显示主题使用的带宽
rostopic delay 显示带有 header 的主题延迟
rostopic echo 打印消息到屏幕
rostopic find 根据类型查找主题
rostopic hz 显示主题的发布频率
rostopic info 显示主题相关信息
rostopic list 显示所有活动状态下的主题
rostopic pub 将数据发布到主题
rostopic type 打印主题类型
重启启动话题通信案例

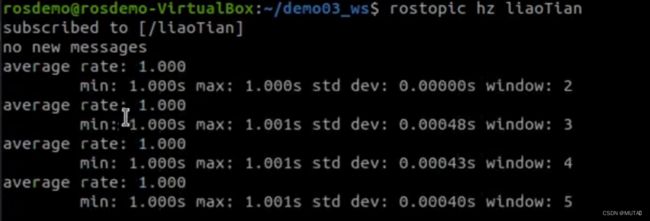
发布和订阅之间的话题是liaoTian
新窗口——rostopic
(1)rostopic list 显示所有活动状态下的主题

rosout、rosout_agg——和日志适用的话题
(2)rostopic echo 获取指定话题当前发布的消息,扮演了消息的订阅方

报错,需要在demo03下操作

(3)rostopic pub 可以直接调用命令向订阅者发布消息,扮演消息的发布方
①
rostopic pub /主题名称 消息类型 消息内容
rostopic pub /chatter std_msgs gagaxixi

liaoTian后可以两个Tab补齐
②按照某种频率发布消息


(4)rostopic info 获取当前话题的相关信息
消息类型、发布者信息、订阅者信息

启动发布方

(5)rostopic hz 列出消息发布频率
三、rosservice
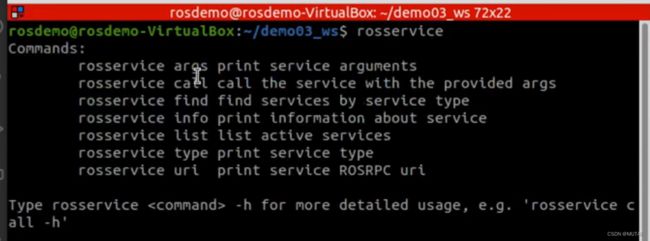
rosservice包含用于列出和查询ROSServices的rosservice命令行工具。
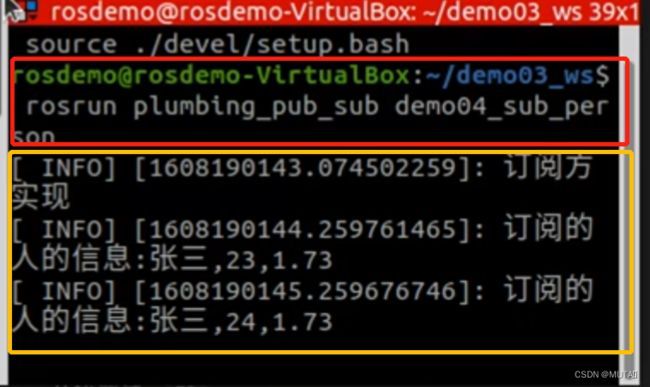
调用部分服务时,如果对相关工作空间没有配置 path,需要进入工作空间调用 source ./devel/setup.bash
rosservice args 打印服务参数
rosservice call 使用提供的参数调用服务
rosservice find 按照服务类型查找服务
rosservice info 打印有关服务的信息
rosservice list 列出所有活动的服务
rosservice type 打印服务类型
rosservice uri 打印服务的 ROSRPC uri启动服务端

新窗口——rosservice
(1)rosservice list 列出所有活动的 service

(2)rosservice call 调用服务

addInts——服务名称,Tab补齐(补不齐空格一下再tab)
(3)rosservice info 获取服务话题详情

(4)rosservice type 打印服务数据类型
![]()