通过FPGA实现基于RS232串口的指令发送并控制显示器中目标位置
目录
1.算法理论概述
串口通信模块
指令解析模块
位置控制模块
显示器驱动模块
2.部分核心程序
3.算法运行软件版本
4.算法运行效果图预览
5.算法完整程序工程
1.算法理论概述
通过FPGA实现基于RS232串口的指令发送并控制显示器中目标位置是一种常见的应用场景,用于实现对显示器中目标位置的控制。该系统利用FPGA芯片作为主控制器,通过RS232串口与计算机或其他设备进行通信,接收指令并解析,然后控制显示器中目标位置的移动。该系统的主要原理是利用FPGA芯片作为主控制器,通过RS232串口与计算机或其他设备进行通信。计算机通过串口发送指令到FPGA,FPGA接收并解析指令,然后根据指令控制显示器中目标位置的移动。系统主要包括串口通信模块、指令解析模块、位置控制模块和显示器驱动模块。
-
串口通信模块
串口通信模块用于与计算机或其他设备进行数据交互。通过RS232串口协议,实现数据的发送和接收。具体实现步骤包括串口初始化、数据发送和数据接收。
-
指令解析模块
指令解析模块用于解析接收到的指令,提取控制参数。指令可以是设定目标位置的命令,例如“MOVE X=100 Y=200”,其中X和Y为目标位置的横纵坐标。指令解析模块通过解析指令中的参数,提取目标位置的横纵坐标。
-
位置控制模块
位置控制模块根据解析得到的目标位置,通过控制信号控制显示器中目标位置的移动。具体实现步骤包括生成控制信号和发送控制信号。控制信号可以是电平信号或PWM信号,用于控制显示器中的驱动器。
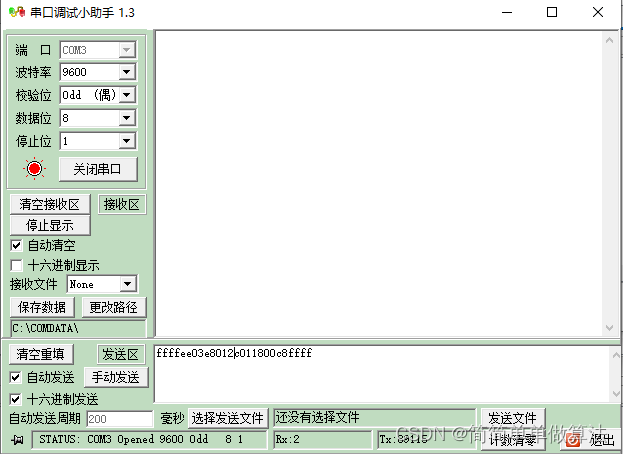
这里,串口发射的数据格式如下:
| 帧头 16个1 表示帧头 |
8bit 是否显示 文字 |
8bit+8bit X坐标 |
8bit+8bit Y坐标 |
8bit+8bit X长度 |
8bit+8bit Y坐标 |
8bit+8bit 校验 |
-
显示器驱动模块
显示器驱动模块接收位置控制模块发送的控制信号,将其转换为显示器可以识别的信号。显示器驱动模块根据控制信号,控制显示器中的电机或其他执行器,使目标位置实现移动。
实现该系统的关键在于FPGA的编程和配置,以及串口通信的数据交互和指令解析的算法设计。此外,还需要根据具体的显示器和驱动器的接口要求进行信号转换和电平调整。
2.部分核心程序
..................................................................
wire RST;
assign RST = ~reset;
wire clk50M;
wire clk25M;
CLK_dcm CLK_dcm_u(// Clock in ports
.CLK_IN1 (clk50), // IN
// Clock out ports
.CLK_OUT1(clk50M), // OUT
.CLK_OUT2(clk25M)
); // OUT
//根据输入使能信号产生行列计数器,用来进行定位
//根据输入使能信号产生行列计数器,用来进行定位
//根据输入使能信号产生行列计数器,用来进行定位
wire [4:0] wvga_r;
wire [5:0] wvga_g;
wire [4:0] wvga_b;
wire [10:0]x_cnt;
wire [9:0] y_cnt;
wire vga_hsync;
wire vga_vsync;
//VGA显示控制部分
vga_disp vga_disp_inst(
.vga_clk (clk25M),
.vga_rst (RST),
.ddr_data_vga (64'd0), //如果使用DDR送入视频,那么从这里输入即可,我这边测试则不考虑,这里空出来
.vga_r (wvga_r), //DDr转换为R,
.vga_g (wvga_g), //DDr转换为G,
.vga_b (wvga_b), //DDr转换为B,
.vga_hsync (vga_hsync),
.vga_vsync (vga_vsync),
.ddr_addr_rd_set (), //ddr_addr_rd_set
.ddr_rden (), //ddr_rden
.ddr_rd_cmd (), //ddr_rd_cmd
.x_cnt (x_cnt),
.y_cnt (y_cnt)
);
//串口输入信号
//串口输入信号
//串口输入信号
//串口输入信号
wire[15:0]w_head;
wire[7 :0]w_text_view;
wire[15:0]w_x;
wire[15:0]w_y;
wire[15:0]w_w;
wire[15:0]w_h;
wire clk_data;
wire clk;
UART_signal instance_name (
.clk50 (clk50M),
.rx (rx),
.reset (RST),
.LED_test (),
.o_head (w_head),
.o_text_view(w_text_view),
.o_x (w_x),
.o_y (w_y),
.o_w (w_w),
.o_h (w_h),
.clk_data (clk_data),
.clk (clk)
);
reg[15:0]r_head;
reg[7 :0]r_text_view;
reg[15:0]r_x;
reg[15:0]r_y;
reg[15:0]r_w;
reg[15:0]r_h;
always @(posedge clk50M or posedge RST)
begin
if(RST)
begin
r_head <= 16'd0;
r_text_view <= 8'd0;
r_x <= 16'd0;
r_y <= 16'd0;
r_w <= 16'd0;
r_h <= 16'd0;
end
else begin
r_head <= w_head;
r_text_view <= w_text_view;
r_x <= w_x;
r_y <= w_y;
r_w <= w_w;
r_h <= w_h;
end
end
//字体显示
/
wire w_FLAG1;
test_load test_load_u(
.i_clk (clk25M),
.i_rst (RST),
.i_en (r_text_view[7]|r_text_view[6]|r_text_view[5]|r_text_view[4]|r_text_view[3]|r_text_view[2]|r_text_view[1]|r_text_view[0]),
.i_xcnt(x_cnt), //根据H和V的使能,得到视频区域的计数器
.i_ycnt(y_cnt), //根据H和V的使能,得到视频区域的计数器
.o_FLAG(w_FLAG1)
);
/
wire w_FLAG2;
box_load box_load_u(
.i_clk (clk25M),
.i_rst (RST),
.i_xcnt (x_cnt), //根据H和V的使能,得到视频区域的计数器
.i_ycnt (y_cnt), //根据H和V的使能,得到视频区域的计数器
.i_width (r_w), //16'd300
.i_height(r_h), //16'd200
.i_xc (r_x), //16'd1000
.i_yc (r_y), //16'd300
.o_flag (w_FLAG2)
);
wire[7:0]CCD_R;
wire[7:0]CCD_G;
wire[7:0]CCD_B;
wire[7:0]CCD_R1;
wire[7:0]CCD_G1;
wire[7:0]CCD_B1;
assign CCD_R1=(w_FLAG1==1'b1)?8'd255:{wvga_r,3'd0};
assign CCD_G1=(w_FLAG1==1'b1)?8'd255:{wvga_g,2'd0};
assign CCD_B1=(w_FLAG1==1'b1)?8'd255:{wvga_b,3'd0};
assign CCD_R=(w_FLAG2==1'b1)?8'd255:{CCD_R1};
assign CCD_G=(w_FLAG2==1'b1)?8'd255:{CCD_G1};
assign CCD_B=(w_FLAG2==1'b1)?8'd255:{CCD_B1};
assign vga_r=CCD_R[7:3];
assign vga_g=CCD_G[7:2];
assign vga_b=CCD_B[7:3];
//在线信号检测,实际最后可以删除
//在线信号检测,实际最后可以删除
//在线信号检测,实际最后可以删除
//在线信号检测,实际最后可以删除
wire[99:0]testdata;
assign testdata[15:0] = r_head;
assign testdata[23:16] = r_text_view;
assign testdata[39:24] = r_x;
assign testdata[55:40] = r_y;
assign testdata[71:56] = r_w;
assign testdata[87:72] = r_h;
assign testdata[88] = clk_data;
assign testdata[89] = clk;
Chipscop Chipscop_u(
.i_clk(clk),
.trig(8'b0000_0000),
.testdata(testdata)
);
endmodule
13_014m
3.算法运行软件版本
MATLAB2022a
ISE14.7
芯片型号:
![]()
使用的FPGA开发板型号如下:
黑金AX545开发板SPARTANT6 XC6S LX45
4.算法运行效果图预览
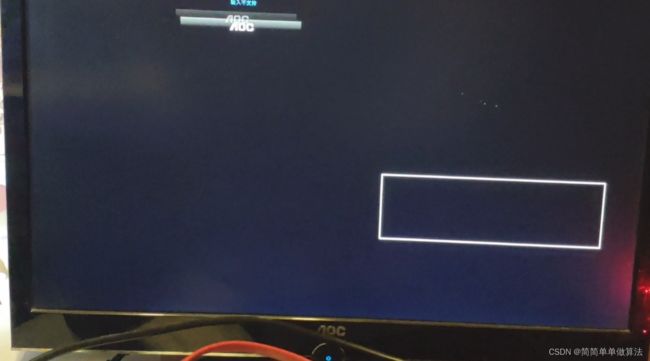
5.算法完整程序工程
OOOOO
OOO
O