51单片机 - 红外遥控时钟
使用资源
1、普中单核-A2开发板
2、红外遥控器、红外接收头
3、LCD1602
4、PCF856T时钟模块
程序结构
main.c - -主要调度放在这
delay.c - -延时函数
lcd1602.c - - LCD1602显示屏驱动函数
time.c - - 定时器相关
pcf8593.c - - 时钟芯片驱动
my_iic.c - - 模拟iic驱动
Infrared.c - - 红外遥控
EXIT.c - - 外部中断,配合进行红外接收
main.c
#include
#include
#include
#include
#include "time.h"
#include "delay.h"
#include "lcd1602.h"
#include "pcf8563T.h"
#include "infrared.h"
#include "EXIT.h"
//主函数
int main(void)
{
LcdInit();
Timer0Init();//定时器0初始化
Timer1Init();//定时器0初始化
infrared_Init();//红外遥控初始化
pcf8563_init();//pcd8563初始化
EA = 1;
while(1)
{
display_time(pcf8563_time_buf);
if(infraredValue != 0)
{
switch(infraredValue)
{
case 0x15:
if(set_type == 0)//不在设置模式下
{
set_type = 1;//进入设置模式
}
else
{
set_type = 0;//退出设置模式
pcf8563_time_buf[6]--;
pcf8563_set_time(pcf8563_time_buf);
}
break;
case 0x07: //从右往左选择修改项
if(set_type > 1)
{
set_type--;
}
else
{
set_type = 7;
}
break;
case 0x09: //从左往右选择修改项
if(set_type < 7)
{
set_type++;
}
else
{
set_type = 1;
}
break;
case 0x40://选择的修改项加1
add_time(set_type - 1);
break;
case 0x19://选择的修改项减1
dec_time(set_type - 1);
break;
}
infraredValue = 0;
}
}
}
delay.c
#include "delay.h"
#include
#include
#define MACHINE_CYCLE MAIN_FOSC_DELAY/12 //定义机器周期HZ
void delay5us(void)
{
#if MAIN_FOSC_DELAY == 11059200UL
_nop_();
#elif MAIN_FOSC_DELAY == 12000000UL
_nop_();
#elif MAIN_FOSC_DELAY == 22118400UL
_nop_();
_nop_();
_nop_();
#endif
}
void delay_us(uint16_t us)
{
uint16_t i = us;
i = (i > 4) ? (i - 4) : i;
while(i--)
{
#if MAIN_FOSC_DELAY == 11059200UL
_nop_();
#elif MAIN_FOSC_DELAY == 12000000UL
_nop_();
#elif MAIN_FOSC_DELAY == 22118400UL
_nop_();
_nop_();
_nop_();
#endif
}
}
void delay_ms(uint16_t ms)
{
uint16_t i, j;
#if MAIN_FOSC_DELAY == 11059200UL
for(i=ms; i>0; i--)
{
for(j=114; j>0; j--)
{
;
}
}
#elif MAIN_FOSC_DELAY == 12000000UL
for(i=0; i delay.h
#ifndef __DELAY_H_
#define __DELAY_H_
#include "typedef.h"
#define MAIN_FOSC_DELAY 11059200UL //定义主时钟HZ
//延时n*1ms
void delay_ms(uint16_t ms);
void delay5us(void);
void delay_us(uint16_t us);
void delay_30us(void);
void delay_40us(void);
void delay_init(void);
#endif
typedef.h
#ifndef __TYPEDEF_H_
#define __TYPEDEF_H_
#include //可变参数必须引用这个头文件
//#define uint16_t unsigned int
#define __WEAK __attribute__((weak))
typedef unsigned long uint32_t;
typedef unsigned int uint16_t;
typedef unsigned char uint8_t;
#endif
lcd1602.c
#include "lcd1602.h"
#include "delay.h"
#include
#include //可变参数必须引用这个头文件
#ifdef UART //定义才调用下方的文件头
#include "uart.h"
#endif
/* 字符获取方式:
点阵格式:阴码
取模走向:顺向
取模方式:逐行式
输出数制:十六进制
用8*8点阵的后5列
*/
unsigned char code table[]= {
0x00,0x00,0x00,0x1F,0x00,0x00,0x00,0x00,//一
0x00,0x00,0x0E,0x00,0x1F,0x00,0x00,0x00,//二
0x00,0x1F,0x00,0x0E,0x00,0x1F,0x00,0x00,//三
0x08,0x0f,0x12,0x0f,0x0a,0x1f,0x02,0x02,//年
0x0f,0x09,0x0f,0x09,0x0f,0x09,0x0b,0x11,//月
0x0F,0x09,0x09,0x0F,0x09,0x09,0x0F,0x00,//日
0x00,0x00,0x04,0x00,0x00,0x04,0x00,0x00,//冒号
0x18,0x18,0x07,0x08,0x08,0x08,0x07,0x00//℃
};
code unsigned char userCodeBuf[] = {0x00,0x01,0x02,0x03,0x04,0x05,0x06,0x07}; //自定义字符数据地址
//重写putchar函数
char putchar(char c)
{
if(c >= 0x20 && c <= 0x7E)
{
LcdWriteData(c); //显示一个字符
}
#ifdef UART
sendByte(c);
#endif
return c;
}
void lcd1602_printf(unsigned char x, unsigned char y, const char *format,...) reentrant
{
va_list my_ap; //定义参数指针,获取可选参数
va_start(my_ap,format); //初始化参数指针,将ap指向第一个实际参数的地址
LcdWriteCom(0x80 + x + 0x40 * y); //设置数据指针起点,从LCD头部开始显示
vprintf(format, my_ap);
va_end(my_ap); //不再使用参数指针,或者需要重新初始化参数指针时,必须先调用va_end宏
}
void setDisplayAddr(unsigned char x, unsigned char y)
{
LcdWriteCom(0x80 + x + 0x40 * y); //设置数据指针起点,从LCD头部开始显示
}
/*******************************************************************************
* 函 数 名 : displayString
* 函数功能 : LCD1602显示一串字符串 ,buf 为要显示的数组,N为要显示的长度,Lin为要显示在哪行
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void displayString(uint8_t* buf, uint16_t N, uint8_t Lin)
{
int i;
N = (N > 16) ? 16 : N;//防止出现大于16的情况
if(Lin == 0)
{
LcdWriteCom(0x80); //设置数据指针起点,从LCD头部开始显示
}
else
{
LcdWriteCom(0x80 + 0x40); //第二行显示
}
for(i = 0; i < N; i++)
{
LcdWriteData(buf[i]); //显示一个字符
}
}
//判断忙指令
void Busy(void)
{
LCD1602_DATAPINS = 0xff;
LCD1602_RS = 0;
LCD1602_RW = 1;
while(LCD1602_DATAPINS & 0x80)
{
LCD1602_E = 0;
LCD1602_E = 1;
}
LCD1602_E = 0;
}
/*******************************************************************************
* 函 数 名 : LcdWriteCom
* 函数功能 : 向LCD写入一个字节的命令
* 输 入 : com
* 输 出 : 无
*******************************************************************************/
void LcdWriteCom(uint8_t com) //写入命令
{
Busy();
LCD1602_RS = 0; //选择发送命令
LCD1602_RW = 0; //选择写入
LCD1602_DATAPINS = com; //放入命令
delay_ms(1); //等待数据稳定
LCD1602_E = 1; //写入时序
#ifdef QUICK
delay_ms(1); //保持时间
#else
delay_ms(5); //保持时间
#endif
LCD1602_E = 0;
}
/*******************************************************************************
* 函 数 名 : LcdWriteData
* 函数功能 : 向LCD写入一个字节的数据
* 输 入 : dat
* 输 出 : 无
*******************************************************************************/
void LcdWriteData(uint8_t dat) //写入数据
{
Busy();
LCD1602_RS = 1; //选择输入数据
LCD1602_RW = 0; //选择写入
LCD1602_DATAPINS = dat; //写入数据
delay_ms(1);
LCD1602_E = 1; //写入时序
#ifdef QUICK
delay_ms(1); //保持时间
#else
delay_ms(5); //保持时间
#endif
LCD1602_E = 0;
}
/*******************************************************************************
* 函 数 名 : LcdInit()
* 函数功能 : 初始化LCD屏
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void LcdInit() //LCD初始化子程序
{
unsigned char i = 0;
//等待LCD1602初始化
delay5us();
delay_us(5);
delay_30us();
delay_40us();
LcdWriteCom(0x38); //开显示
LcdWriteCom(0x0c); //开显示不显示光标
LcdWriteCom(0x06); //写一个指针加1
LcdWriteCom(0x01); //清屏
LcdWriteCom(0x80); //设置数据指针起点
setDisplayAddr(0, 0);
displayString("lcd1602 Init", 12, 0);
lcd1602_printf(0, 0, "LCD1602_Init");
/* 开始写入你要显示的自定义字符、汉字代码 */
LcdWriteCom(0x40);
for(i=0; i<64; i++)
{
LcdWriteData(table[i]);
}
displayString(" ", 12, 0);
}
lcd1602.h
#ifndef __LCD1602_H_
#define __LCD1602_H_
#define QUICK 1 //有此宏定义时,为快速模式,否则为慢速模式
/**********************************
包含头文件
**********************************/
#include
#include "typedef.h"
/**********************************
PIN口定义
**********************************/
#define LCD1602_DATAPINS P0
sbit LCD1602_RS=P2^6;
sbit LCD1602_RW=P2^5;
sbit LCD1602_E=P2^7;
extern unsigned char code userCodeBuf[];//用户自定义的7个字的地址数组
/**********************************
函数声明
**********************************/
/*在51单片机12MHZ时钟下的延时函数*/
void Lcd1602_Delay1ms(uint16_t c); //误差 0us
/*LCD1602写入8位命令子函数*/
void LcdWriteCom(uint8_t com);
/*LCD1602写入8位数据子函数*/
void LcdWriteData(uint8_t dat) ;
/*LCD1602初始化子程序*/
void LcdInit();
void displayString(uint8_t* buf, uint16_t N, uint8_t Lin);
void setDisplayAddr(unsigned char x, unsigned char y);
void lcd1602_printf(unsigned char x, unsigned char y, const char *format,...)reentrant;
#endif
time.c
#include "time.h"
#include "delay.h"
#ifdef ADC0809 //定义才调用下方的文件头
#include "ADC0809.h"
#endif
#ifdef UART //定义才调用下方的文件头
#include "uart.h"
#endif
bit half_one_second_flag = 0;//0.5秒标志位
unsigned int time0Cnt = 0;
//定时器0中断
void Timer0Init(void) //定时器初始化为1ms一次
{
TMOD |= 0X01; //选择为定时器0模式,工作方式1,仅用TR0打开启动。
TL0 = T1MS_0;//给定时器赋初值,定时1ms ,计算方式(65536 -(12/12*1000))%256
TH0 = T1MS_0 >> 8;//给定时器赋初值,定时1ms ,计算方式(65536 -(12/12*1000))/256
ET0 = 1; //打开定时器0中断允许
TR0 = 1; //打开定时器
}
//定时器1中断
void Timer1Init(void) //定时器初始化为1ms一次
{
TMOD |= 0x10; //set timer1 as mode1 (16-bit)
TL1 = T1MS_1; //initial timer1 low byte
TH1 = T1MS_1 >> 8; //initial timer1 high byte
TR1 = 0; //timer1 start running
ET1 = 1; //enable timer1 interrupt
}
void time0_isr() interrupt 1 using 0
{
static unsigned int count = 0;
TL0 = T1MS_0;//手动重装载
TH0 = T1MS_0 >> 8;//手动重装载
#ifdef ADC0809
CLK = !CLK;//ADC0809的时钟信号
#endif
#ifdef UART
if(timeout < RECEIVE_TIMEOUT)//当小于接收超时时间时
{
if(++timeout == RECEIVE_TIMEOUT)
{
receiveFinshFlag = 1;//串口1帧数据接收完毕
}
}
#endif
if(++count >= 500)
{
count = 0;
half_one_second_flag = 1;
time0Cnt++;
}
}
/* Timer0 interrupt routine */
void time1_isr() interrupt 3 using 1
{
TL1 = T1MS_1; //reload timer1 low byte
TH1 = T1MS_1 >> 8; //reload timer1 high byte
}
time.h
#ifndef __TIME_H_
#define __TIME_H_
#include
#include "typedef.h"
extern uint16_t time0Cnt;
extern bit half_one_second_flag;//0.5秒标志位
#define T1MS_0 (65536-MAIN_FOSC_DELAY/12/1000) //1ms timer calculation method in 12T mode
#define T1MS_1 (65536-MAIN_FOSC_DELAY/12/1000) //1ms timer calculation method in 12T mode
#define TIMER_MODE0 0x00
#define TIMER_MODE1 0x01
#define TIMER_MODE2 0x02
#define TIMER_MODE3 0x03
//定时器0
void Timer0Init(void); //定时器初始化为1ms一次
//定时器1
void Timer1Init(void); //定时器初始化为1ms一次
#endif
pcf8563.c
#include "pcf8563T.h"
#include "my_iic.h"
#include "lcd1602.h"
#include "time.h"
#include "delay.h"
unsigned char set_type = 0; //设置类别 1-7分别代表 年月日时分秒周
unsigned char pcf8563_time_buf[7] = {0x21, 0x08, 0x14, 0x18, 0x29, 0x55, 0x06};
//日期转星期 周一到周日分别为 0-6
unsigned char day_to_weed(unsigned char* time_buf)
{
unsigned int year;
unsigned int month;
unsigned int day;
year = 2000 + BCD2HEX(time_buf[0]);
month = BCD2HEX(time_buf[1]);
day = BCD2HEX(time_buf[2]);
day = (unsigned char)((day+2*month+3*(month+1)/5+year+year/4-year/100+year/400) % 7);
lcd1602_printf(0, 0, "\r\n现在是周%d\r\n", day);
return (unsigned char)day;
}
void pcf8563_send_one_byte(unsigned char addr, unsigned char dat)
{
IIC_Start();
IIC_Send_Byte(WRITE_COMMAND);
IIC_Wait_Ack();
IIC_Send_Byte(addr);
IIC_Wait_Ack();
IIC_Send_Byte(dat);
IIC_Wait_Ack();
IIC_Stop();
}
unsigned char pcf8563_read_one_byte(unsigned char addr)
{
unsigned char temp;
IIC_Start();
IIC_Send_Byte(WRITE_COMMAND);
IIC_Wait_Ack();
IIC_Send_Byte(addr);
IIC_Wait_Ack();
IIC_Start();
IIC_Send_Byte(READ_COMMAND);
IIC_Wait_Ack();
temp = IIC_Read_Byte(0);//发送非应答信号
IIC_Stop();
return temp;
}
void pcf8563_set_time(unsigned char* buf)
{
pcf8563_send_one_byte(PCF8563_REG_STATUS1, 0x20); // 关闭时钟
pcf8563_send_one_byte(PCF8563_REG_YEAR, buf[0]); //年
pcf8563_send_one_byte(PCF8563_REG_MONTH, buf[1]); //月
pcf8563_send_one_byte(PCF8563_REG_DAY, buf[2]); //日
pcf8563_send_one_byte(PCF8563_REG_HOURS, buf[3]); //时
pcf8563_send_one_byte(PCF8563_REG_MINUTE, buf[4]); //分
pcf8563_send_one_byte(PCF8563_REG_SECOND, buf[5]); //秒
buf[6] = day_to_weed(buf);//日期转换为周
pcf8563_send_one_byte(PCF8563_REG_WEEK, buf[6]); //周
pcf8563_send_one_byte(PCF8563_REG_STATUS1, 0x00);//启动时钟
}
void pcf8563_init(void)
{
pcf8563_send_one_byte(PCF8563_REG_STATUS1, 0x00);//启动时钟
}
void pcf8563_read_time(unsigned char* buf)
{
// buf[0] = BCD2HEX(pcf8563_read_one_byte(PCF8563_REG_YEAR));
// buf[1] = BCD2HEX(pcf8563_read_one_byte(PCF8563_REG_MONTH)&0x1f);
// buf[2] = BCD2HEX(pcf8563_read_one_byte(PCF8563_REG_DAY)&0x3f);
// buf[3] = BCD2HEX(pcf8563_read_one_byte(PCF8563_REG_HOURS)&0x3f);
// buf[4] = BCD2HEX(pcf8563_read_one_byte(PCF8563_REG_MINUTE)&0x7f);
// buf[5] = BCD2HEX(pcf8563_read_one_byte(PCF8563_REG_SECOND)&0x7f);
// buf[6] = BCD2HEX(pcf8563_read_one_byte(PCF8563_REG_WEEK)&0x07) + 1;
buf[0] = pcf8563_read_one_byte(PCF8563_REG_YEAR);
buf[1] = pcf8563_read_one_byte(PCF8563_REG_MONTH)&0x1f;
buf[2] = pcf8563_read_one_byte(PCF8563_REG_DAY)&0x3f;
buf[3] = pcf8563_read_one_byte(PCF8563_REG_HOURS)&0x3f;
buf[4] = pcf8563_read_one_byte(PCF8563_REG_MINUTE)&0x7f;
buf[5] = pcf8563_read_one_byte(PCF8563_REG_SECOND)&0x7f;
buf[6] = (pcf8563_read_one_byte(PCF8563_REG_WEEK)&0x07) + 1;
}
void add_time(unsigned char index)
{
pcf8563_time_buf[index]++;
if((pcf8563_time_buf[index]&0x0f) > 9)//换成BCD码
{
pcf8563_time_buf[index] += 6;
}
switch(index)
{
case 0://修改年
if(pcf8563_time_buf[index] > 0x99)
{
pcf8563_time_buf[index] = 0;
}
break;
case 1://修改月
if(pcf8563_time_buf[index] > 0x12)
{
pcf8563_time_buf[index] = 0;
}
break;
case 2://修改日
if(pcf8563_time_buf[index] > 0x31)
{
pcf8563_time_buf[index] = 0;
}
break;
case 3://修改时
if(pcf8563_time_buf[index] > 0x23)
{
pcf8563_time_buf[index] = 0;
}
break;
case 4://修改分
if(pcf8563_time_buf[index] > 0x59)
{
pcf8563_time_buf[index] = 0;
}
break;
case 5://修改秒
if(pcf8563_time_buf[index] > 0x59)
{
pcf8563_time_buf[index] = 0;
}
break;
case 6://修改周
if(pcf8563_time_buf[index] > 0x7)
{
pcf8563_time_buf[index] = 1;
}
break;
}
}
void dec_time(unsigned char index)
{
switch(index)
{
case 0://修改年
if(pcf8563_time_buf[index] == 0)
{
pcf8563_time_buf[index] = 99;
}
break;
case 1://修改月
if(pcf8563_time_buf[index] == 0)
{
pcf8563_time_buf[index] = 0x13;
}
break;
case 2://修改日
if(pcf8563_time_buf[index] == 0)
{
pcf8563_time_buf[index] = 0x32;
}
break;
case 3://修改时
if(pcf8563_time_buf[index] == 0)
{
pcf8563_time_buf[index] = 0x24;
}
break;
case 4://修改分
if(pcf8563_time_buf[index] == 0)
{
pcf8563_time_buf[index] = 0x60;
}
break;
case 5://修改秒
if(pcf8563_time_buf[index] == 0)
{
pcf8563_time_buf[index] = 0x60;
}
break;
case 6://修改周
if(pcf8563_time_buf[index] == 0)
{
pcf8563_time_buf[index] = 0x08;
}
break;
}
pcf8563_time_buf[index]--;
if((pcf8563_time_buf[index]&0x0f) > 9)//换成BCD码
{
pcf8563_time_buf[index] -= 6;
}
}
void display_time(unsigned char* buf)
{
static unsigned int count = 0;
if(++count <= 5000)
{
delay_us(1);
return;
}
else
{
count = 0;
}
if(set_type == 0)//不在设置模式的情况下才读取时间
{
pcf8563_read_time(pcf8563_time_buf);//读取时间
}
lcd1602_printf(0, 0, "20%02x %02x %02x", (int)buf[0], (int)buf[1], (int)buf[2]); //年月日
setDisplayAddr(4, 0);
LcdWriteData(userCodeBuf[3]); //显示年
setDisplayAddr(7, 0);
LcdWriteData(userCodeBuf[4]); //显示月
setDisplayAddr(10, 0);
LcdWriteData(userCodeBuf[5]); //显示日
lcd1602_printf(0, 1, "%02x %02x %02x %x\r\n", (int)buf[3], (int)buf[4], (int)buf[5], (int)buf[6]); //时分秒周
setDisplayAddr(2, 1);
LcdWriteData(userCodeBuf[6]); //显示冒号
setDisplayAddr(5, 1);
LcdWriteData(userCodeBuf[6]); //显示冒号
if(set_type != 0)//在设置时间模式下
{
if(half_one_second_flag == 1)
{
half_one_second_flag = 0;
delay_ms(100);
switch(set_type)
{
case 1:
lcd1602_printf(2, 0, " ");//将年显示关闭,达到闪烁的效果
break;
case 2:
lcd1602_printf(5, 0, " ");//将年显示关闭,达到闪烁的效果
break;
case 3:
lcd1602_printf(8, 0, " ");//将年显示关闭,达到闪烁的效果
break;
case 4:
lcd1602_printf(0, 1, " ");//将年显示关闭,达到闪烁的效果
break;
case 5:
lcd1602_printf(3, 1, " ");//将年显示关闭,达到闪烁的效果
break;
case 6:
lcd1602_printf(6, 1, " ");//将年显示关闭,达到闪烁的效果
break;
case 7:
lcd1602_printf(10, 1, " ");//将年显示关闭,达到闪烁的效果
break;
}
}
}
}
pcf8563.h
#ifndef __PCF8563T_H_
#define __PCF8563T_H_
#define BCD2HEX(x) ((((x) >> 4) * 10) + ((x) & 0x0f))
#define HEX2BCD(x) ((((x) / 10) << 4) + ((x) % 10))
extern unsigned char pcf8563_time_buf[7];
extern unsigned char set_type; //设置类别 1-7分别代表 年月日时分秒周
#define WRITE_COMMAND 0xa2
#define READ_COMMAND 0xa3
//---寄存器定义
#define PCF8563_REG_STATUS1 0x00
#define PCF8563_REG_STATUS2 0x01
#define PCF8563_REG_SECOND 0x02
#define PCF8563_REG_MINUTE 0x03
#define PCF8563_REG_HOURS 0x04
#define PCF8563_REG_DAY 0x05
#define PCF8563_REG_WEEK 0x06
#define PCF8563_REG_MONTH 0x07
#define PCF8563_REG_YEAR 0x08
#define PCF8563_REG_MINUTE_ALARM 0x09
#define PCF8563_REG_HOURS_ALARM 0x0A
#define PCF8563_REG_DAY_ALARM 0x0B
#define PCF8563_REG_WEEK_ALARM 0x0C
#define PCF8563_REG_CLKOUT 0x0D
#define PCF8563_REG_TIMER_CTR 0x0E
#define PCF8563_REG_TIMER 0x0F
//---CLKOUT的输出
#define PCF8563_CLKOUT_32768HZ 0
#define PCF8563_CLKOUT_1024HZ 1
#define PCF8563_CLKOUT_32HZ 2
#define PCF8563_CLKOUT_1HZ 3
//---函数定义
void pcf8563_send_one_byte(unsigned char addr, unsigned char dat);
unsigned char pcf8563_read_one_byte(unsigned char addr);
void pcf8563_set_time(unsigned char* buf);
void pcf8563_read_time(unsigned char* buf);
void pcf8563_init(void);
void add_time(unsigned char index);
void dec_time(unsigned char index);
void display_time(unsigned char* buf);
#endif
my_iic.c
#include "my_iic.h"
#include "delay.h"
#include
void IIC_Start(void)//启动信号,将时钟线与数据线都拉高,然后先将数据线拉低,再将时钟线拉低,通讯就这样开始了
{
I2C_SDA = 1;//拉高数据线
I2C_CLK = 1;//拉高时钟线
delay_us(5);//适当延时,不能太低,高了也不好,低了芯片识别不了,久了通讯速率太慢。
I2C_SDA = 0;
delay_us(5);
I2C_CLK = 0;
}
void IIC_Stop(void)
{
I2C_SDA = 0;
I2C_CLK = 0;
delay_us(5);//适当延时,不能太低,高了也不好,低了芯片识别不了,久了通讯速率太慢。
I2C_CLK = 1;
I2C_SDA = 1;
delay_us(5);//适当延时,不能太低,高了也不好,低了芯片识别不了,久了通讯速率太慢。
}
//返回1说明错误
uint8_t IIC_Wait_Ack(void)//写数据时等待对方应答
{
uint8_t i= 0;
I2C_SDA = 1;
_nop_();
I2C_CLK = 1;
_nop_();
while(I2C_SDA)
{
if(++i > 250)
{
return 1;
}
_nop_();
}
I2C_CLK = 0;
return 0;
}
void IIC_Ack(void)//读数据的时候给对方应答
{
I2C_CLK = 0;
delay_us(2);
I2C_SDA = 0;
delay_us(2);
I2C_CLK = 1;
delay_us(2);
I2C_CLK = 0;
}
void IIC_NAck(void)//读数据即将结束的时候不给对方应答
{
I2C_CLK = 0;
delay_us(5);
I2C_SDA = 1;
delay_us(5);
I2C_CLK = 1;
delay_us(5);
}
void IIC_Send_Byte(uint8_t txd)//发送一个字节
{
uint8_t i;
I2C_CLK = 0;
for(i=0; i<8; i++)
{
I2C_SDA = (txd&0x80)>>7;
txd <<= 1;
delay_us(2);
I2C_CLK = 1;
delay_us(2);
I2C_CLK = 0;
delay_us(2);
}
}
uint8_t IIC_Read_Byte(uint8_t ack)//读取一个字节
{
uint8_t i;
uint8_t receive = 0;
for(i=0; i<8; i++)
{
I2C_CLK = 0;
delay_us(1);
I2C_CLK = 1;
receive <<= 1;
if(I2C_SDA)
{
receive++;
}
delay_us(1);
}
if (!ack)
{
IIC_NAck();//发送nACK
}
else
{
IIC_Ack(); //发送ACK
}
return receive;
}
my_iic.h
#ifndef __MY_IIC_H_
#define __MY_IIC_H_
#include
#include "typedef.h"
sbit I2C_CLK = P2 ^ 3;
sbit I2C_SDA = P2 ^ 4;
void IIC_Start(void);//启动信号,将时钟线与数据线都拉高,然后先将数据线拉低,再将时钟线拉低,通讯就这样开始了
void IIC_Stop(void);
uint8_t IIC_Wait_Ack(void);//写数据时等待对方应答
void IIC_Ack(void);//读数据的时候给对方应答
void IIC_NAck(void);//读数据即将结束的时候不给对方应答
void IIC_Send_Byte(uint8_t dat);//发送一个字节
uint8_t IIC_Read_Byte(uint8_t ack);//读取一个字节
#endif
Infrared.c
#include "infrared.h"
#include "delay.h"
#include "EXIT.h"
#include
unsigned char infraredValue;//红外接收键值
//红外通讯初始化
void infrared_Init(void)
{
EXIT0_Init();//外部中断0初始化
EA = 1;
infrared_in = 1;
}
void readInfrared(unsigned char* dat)
{
unsigned char i,j;//循环控制变量
unsigned char Time;//高电平时间计算
unsigned int errorCnt;//等待计时
unsigned char readBuf[2];//临时存放数组
Time = 0;
delay_ms(7); //7ms
if(!infrared_in) //确认是否真的接收到正确的信号
{
errorCnt = 1000; //1000*10us=10ms,超过说明接收到错误的信号
/*当两个条件都为真是循环,如果有一个条件为假的时候跳出循环,免得程序出错的时
侯,程序死在这里*/
while((infrared_in == 0)&&( errorCnt > 0)) //等待前面9ms的低电平过去
{
delay_us(1);
errorCnt--;
}
if(infrared_in == 1) //如果正确等到9ms低电平
{
errorCnt = 500;
while((infrared_in == 1) && (errorCnt > 0)) //等待4.5ms的起始高电平过去
{
delay_us(1);
errorCnt--;
}
for(i=0; i<4; i++) //共有4组数据
{
for(j=0; j<8; j++) //接收一字节数据
{
errorCnt = 60;
while((infrared_in == 0)&&(errorCnt > 0))//等待信号前面的560us低电平过去
{
delay_us(10);
errorCnt--;
}
errorCnt = 500;
while((infrared_in == 1) && (errorCnt > 0)) //计算高电平的时间长度。
{
delay_us(10); //0.1ms
Time++;
errorCnt--;
if(Time > 30)
{
return;
}
}
readBuf[i%2] >>= 1; //i表示第几组数据
if(Time >= 8) //如果高电平出现大于565us,那么是1
{
readBuf[i%2] |= 0x80;
}
Time = 0; //用完时间要重新赋值
}
}
}
//校验失败,则让值等于0
if(readBuf[0] != ~readBuf[1])
{
*dat = 0;
}
else
{
*dat = readBuf[0];//校验成功,得到键值
}
}
}
Infrared.h
#ifndef __INFRARED_H_
#define __INFRARED_H_
#include
#include "typedef.h"
sbit infrared_in = P3 ^ 2;//红外接收头引脚
extern unsigned char infraredValue;//红外接收键值
void infrared_Init(void);
void readInfrared(unsigned char* dat);
#endif
EXIT.c
#include "EXIT.h"
#include "infrared.h"
#include
#ifdef EXIT_0
void EXIT0_Init(void)
{
IT0=1; //INT0负跳变触发
EX0 = 1; //开外部INTO中断
}
//外部中断0中断服务函数
void exint0() interrupt 0 //(location at 0003H)
{
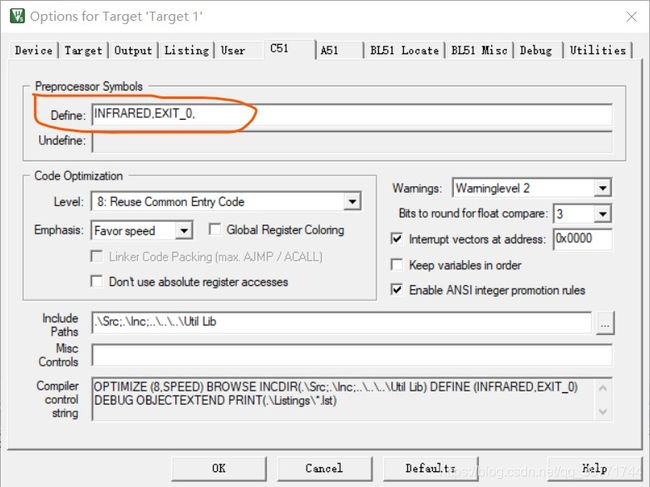
#ifdef INFRARED //若在keil编译指令中定义了这个宏,且为1,这调用下方读取红外信号的函数
readInfrared(&infraredValue);
#endif
}
#endif
#ifdef EXIT_1
void EXIT1_Init(void)
{
IT1=1; //INT1负跳变触发
EX1 = 1; //开外部INTO中断
}
//外部中断1中断服务函数
void exint1() interrupt 2 //(location at 0013H)
{
}
#endif
EXIT.h
#ifndef __EXIT_H_
#define __EXIT_H_
#include "typedef.h"
void EXIT0_Init(void);
void EXIT1_Init(void);
#endif

请注意,编译的时候增加宏定义开关 “INFRARED,EXIT_0”