DSA之图(4):图的应用
文章目录
- 0 图的应用
- 1 生成树
-
- 1.1 无向图的生成树
- 1.2 最小生成树
-
- 1.2.1 构造最小生成树
- 1.2.2 Prim算法构造最小生成树
- 1.2.3 Kruskal算法构造最小生成树
- 1.2.4 两种算法的比较
- 1.3 最短路径
-
- 1.3.1 两点间最短路径
- 1.3.2 某源点到其他各点最短路径
- 1.3.3 Dijkstra
- 1.3.4 Floyd
- 1.4 拓扑排序
-
- 1.4.1 有向无环图DAG
- 1.4.2 AOV网
- 1.5 关键路径
-
- 1.5.1 求解关键路径
0 图的应用

1 生成树
生成树:所有顶点均由边连接在一起,但不存在回路的图。
也就是两个条件,顶点条件和边数条件,顶点都要保持连通,边数达到最少,没有回路。
如右边的图,随便再加一条边就有回路了。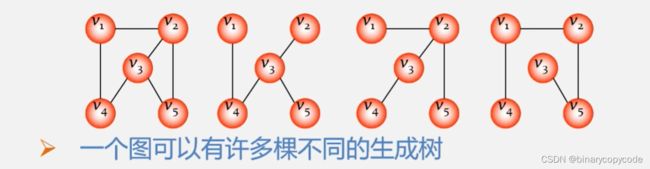
所有生成树都具有以下的共同特点:
- 生成树的顶点个数与图的顶点个数相同;
- 生成树是图的极小连通子图,去掉一条边则非连通;
- 一个有 n n n个顶点的连通图的生成树有 n − 1 n-1 n−1条边;
- 生成树中任意两个顶点间的路径是唯一的;
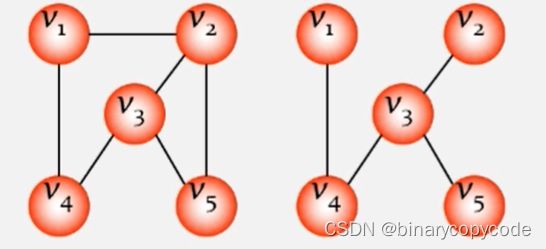
- 含有 n n n个顶点 n − 1 n-1 n−1条边的图不一定是生成树,如下图所示

因为生成树是连通的,每个顶点都要用边相连,上图是不连通的,有两个连通分量。
1.1 无向图的生成树
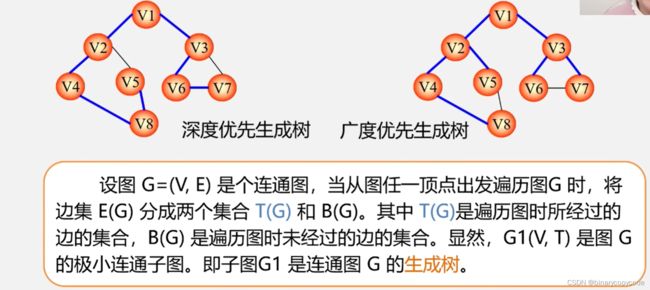
生成树要包含所有顶点,那么对图进行遍历,把走过的边全部加入到图当中。
遍历则采用DFS与BFS都可以。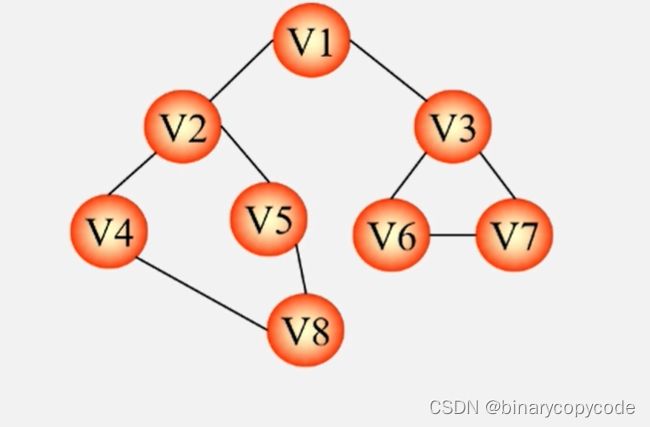
用DFS生成的生成树就是DFS生成树。

用BFS生成的生成树就是BFS生成树。

综上
1.2 最小生成树

最小生成树:给定一无向网络在该网的所有生成树中,使得各边权值之和最小的那棵生成树称为该网的最小生成树,也叫最小代价生成树。
最小生成树可能是不唯一的。
1.2.1 构造最小生成树
构造最小生成树的算法很多,其中多数算法都利用了MST(Minimum Spanning Tree)的性质。
MST性质:
其实就是贪心算法,不断去找权值最小的边。
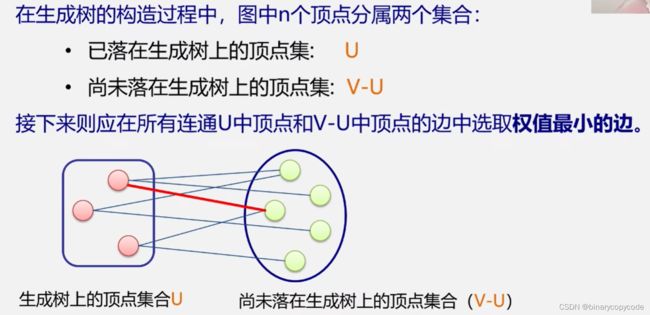
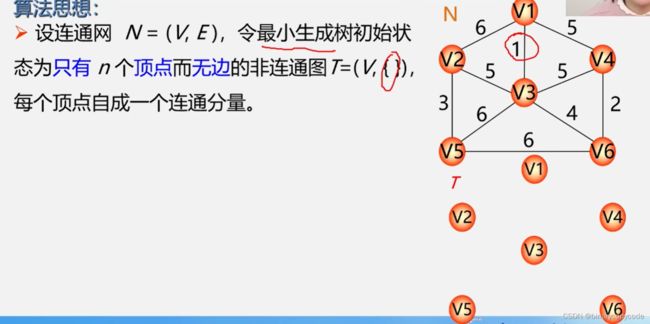
设 N = ( V , E ) N=(V, E) N=(V,E)以目是一个连通网, U U U是顶点集 V V V的一个非空子集。若边 ( u , v ) (u, v) (u,v)是一条具有最小权值的边,其中 u ∈ U , v ∈ V − U u∈U,v∈V-U u∈U,v∈V−U则必存在一棵包含边 ( u , v ) (u,v) (u,v)的最小生成树。
举例
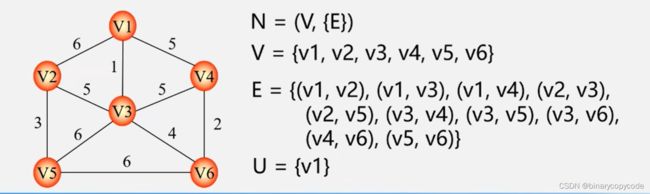
现在 U = { v 1 } U=\{v_1\} U={v1},所以 V − U = { v 2 , v 3 , v 4 , v 5 , v 6 } V-U=\{v_2,v_3,v_4,v_5,v_6\} V−U={v2,v3,v4,v5,v6},所以 u ∈ U , v ∈ V − U u∈U,v∈V-U u∈U,v∈V−U当中,其中从 v 1 v_1 v1到 v 3 v_3 v3是最小的,权值为1,存在这个权值最小的边,这条边一定会包含在某个最下生成树当中。
1.2.2 Prim算法构造最小生成树
算法思想:

1.2.3 Kruskal算法构造最小生成树
相比Prim算法更加贪心,直截了当贪心,前提不成环。这次开始就把所有顶点都加入到最小生成树上面去。不过并不包括边,这时边的集合都是空集,没包含边,彼此之间不连通。
然后直接在边集合当中选权值最小的边,直接加入。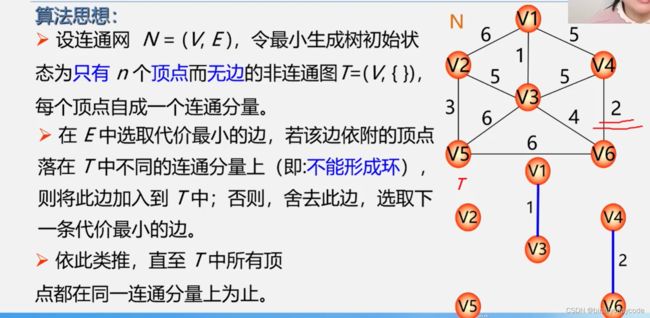
以此类推,选到所有顶点都连通为止(前提不能形成回路)(n个点,n-1条边)。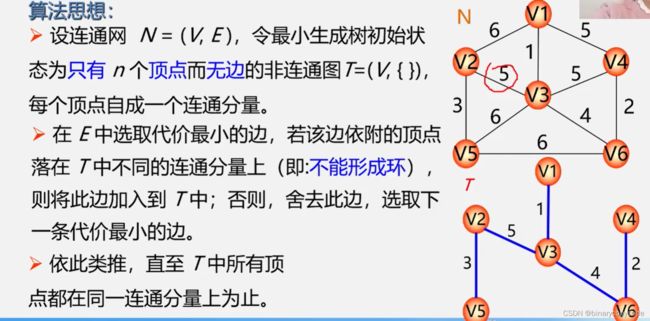
1.2.4 两种算法的比较
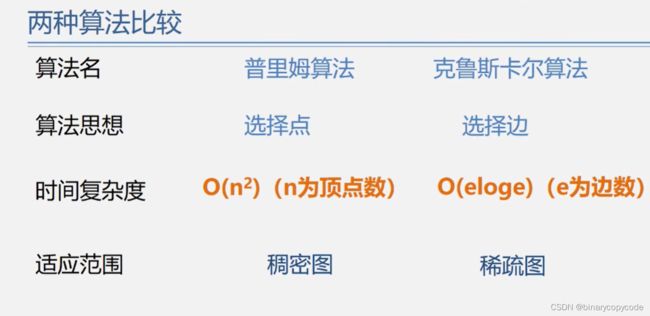
Prim是选择点加入的,而Kruskal是选择边的。选择边的时候和顶点数是没关系的。
1.3 最短路径
1.3.1 两点间最短路径
从起点走向终点,并非要n个节点都包括,也并非要n-1条边。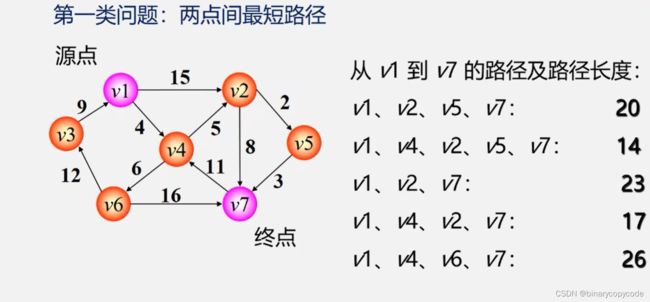
直到找到路径长度最短的一条路径。
这种最短路径也称为单源的最短路径,采用Dijkstra算法。
1.3.2 某源点到其他各点最短路径
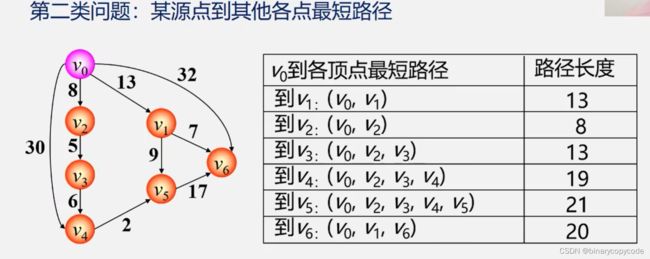
所有顶点的最短路径,统一使用Floyd弗洛伊德算法。
1.3.3 Dijkstra
其时间复杂度为 O ( n 3 ) O(n^3) O(n3)
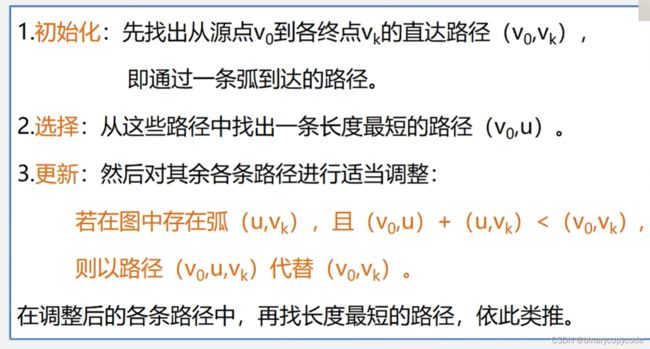
按照路径长度递增次序产生最短路径,启发式贪心算法。
启发式算法,先找最短的,后面再及时更新,具体过程可以看王老师的视频。
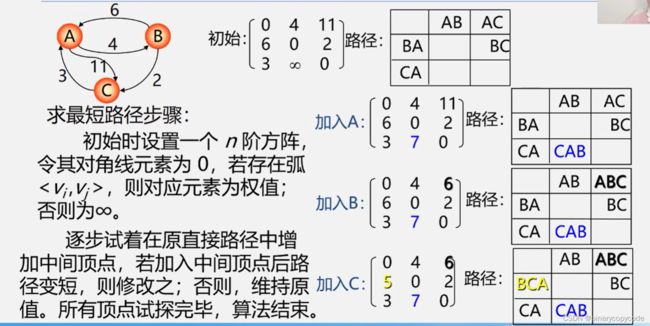
1.3.4 Floyd
其时间复杂度为 O ( n 3 ) O(n^3) O(n3)
算法思想:
- 逐个顶点试探
- 从少,到的所有可能存在的路径中
- 选出一条长度最短的路径
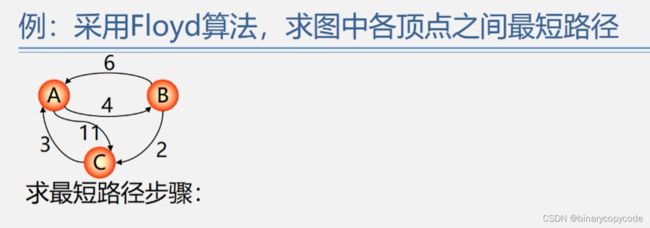
求最短路径的步骤:
初始时设置一个 n n n阶方阵,令其对角线元素(到自身的路径)为0,若存在弧 < v i , v j >
逐步试着在原直接路径中增加中间顶点,若加入中间顶点后路径变短,则修改之;否则,维持原值。所有顶点试探完毕,算法结束。
1.4 拓扑排序
1.4.1 有向无环图DAG
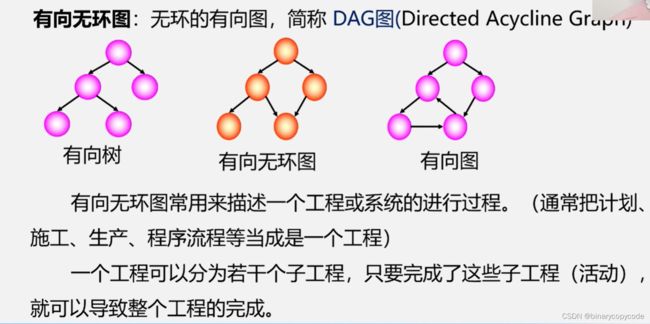

AOV网以顶点表示活动;AOE网用弧表示活动(子工程)。
AOV网用来解决拓扑排序,AOE网用来解决关键路径问题。
拓扑排序的一个小例子:
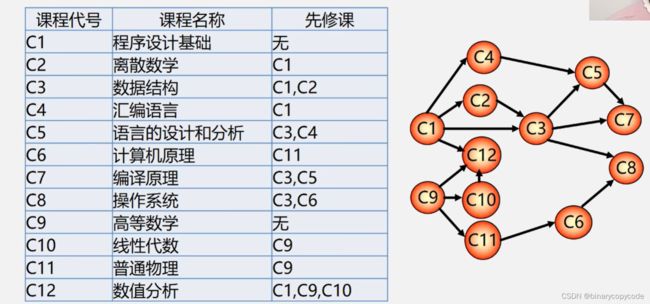
1.4.2 AOV网
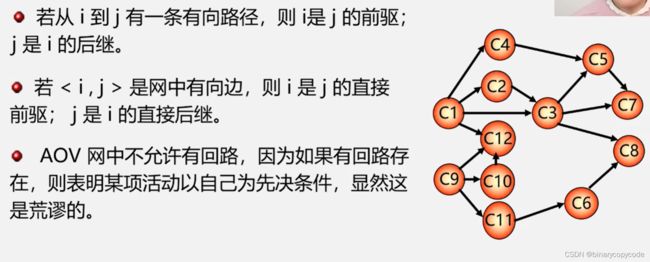
问题:如何判断AOV网中是否存在回路?
答:
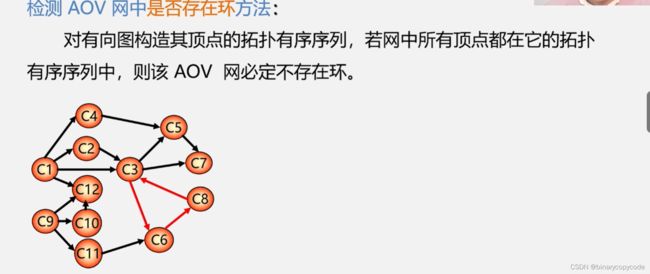
所有顶点都能加入拓扑排序的话,就一定没有网。
拓扑排序。
将网变成一个线性序列的过程就是拓扑排序。

拓扑排序的步骤:
- 首先构建好AOV网
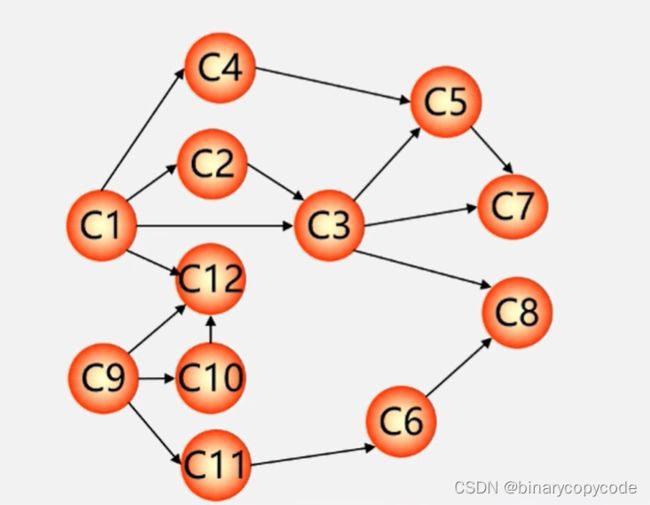
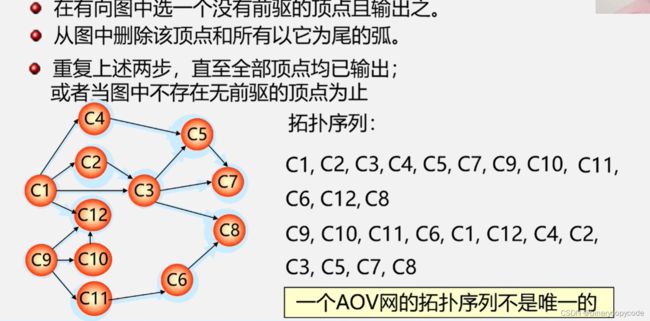
- 在有向图中选一个没有前驱的顶点且输出(例如C1和C9)
- 假设选了C1,在有向图当中删除该顶点和所有以它为尾的弧(C1发出的弧)(即C1与C2,C4,C12的弧)
- 重复上述两步,直至全部顶点均已输出;或者当图中不存在无前驱的顶点为止
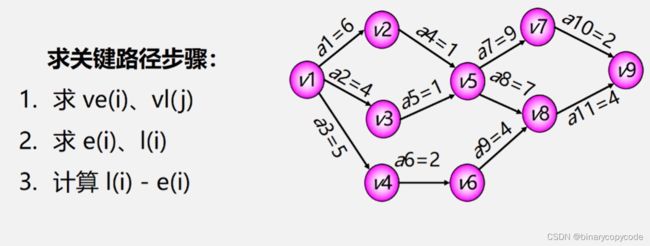
1.5 关键路径
制定计划,查找关键路径。
关键路径就是从源点到汇点路径长度(权值之和)最长(大)的路径。

按照任务需求,构建有权图。
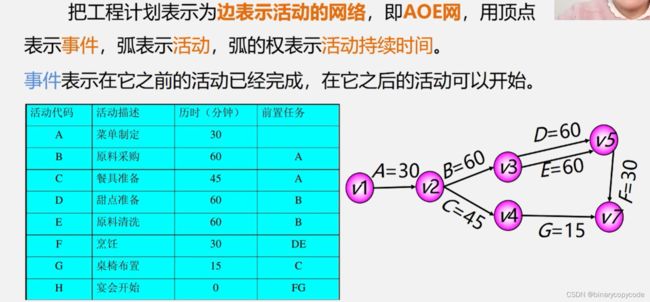
举例:
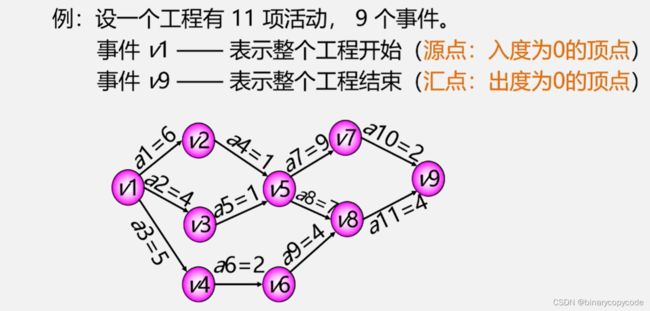
对于上方AOE网,我们关心两个问题:
- 完成整项女程至少需要多少时间?
- 哪些活动是影响工程进度的关键?
以上答为关键路径与路径长度。
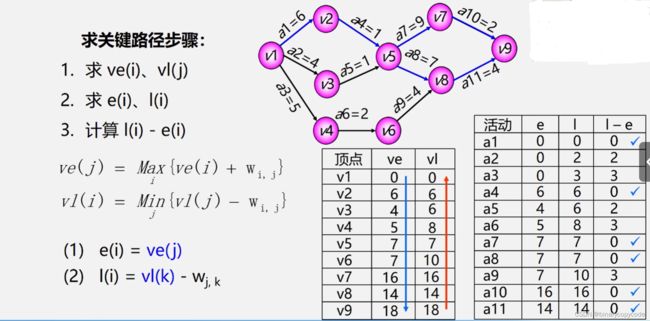
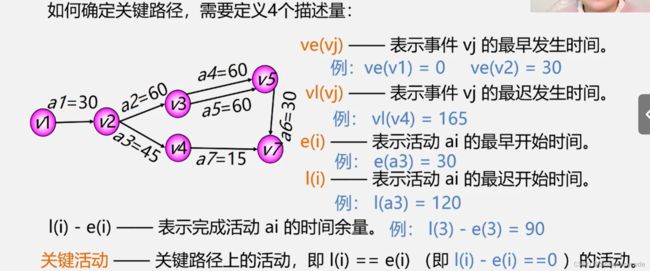
1.5.1 求解关键路径
四个有用的量:

求关键路径的步骤: