目标检测之3维合成
现在有一系列的图片,图片之间可以按照z轴方向进行排列。图片经过了目标检测,输出了一系列的检测框,现在的需求是将检测框按类别进行合成,以在3维上生成检测结果。
思路:将图片按照z轴方向排列,以z轴索引作为检测框的z值。等同于输入为(x, y, w, h, z, class_id),可以计算得到每个检测框的中心点来标定这个框(x_center, y_center, z, class_id)。
然后可以通过聚类算法在4维空间上进行聚类,最后取出聚类出的每一类的点的xyz的最大值与最小值和class_id来生成聚类结果[x_min, y_min, z_min, x_max, y_max, z_max, class_id]。
代码展示:
from sklearn.cluster import DBSCAN
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
import numpy as np
class BBoxClusterv3:
def __init__(self, bbox_list):
self.bbox_list = bbox_list
self.clustering = None
# self.color_map = plt.cm.get_cmap('hsv', len(set([bbox[5] for bbox in bbox_list])))
def cluster(self, eps=100, min_samples=2):
X = [[bbox[0]+bbox[2]/2, bbox[1]+bbox[3]/2, bbox[4], bbox[5]] for bbox in self.bbox_list] # 中心点的x,y,z坐标和类别ID
# breakpoint()
self.clustering = DBSCAN(eps=eps, min_samples=min_samples).fit(X)
def get_new_bbox_list(self):
# self.cluster()
labels = self.clustering.labels_
print("聚类出的类别:",labels)
new_bbox_list = []
for label in set(labels):
if label != -1: # Ignore noise
idxs = np.where(labels == label)[0]
print("每一类的bboxes索引: ",idxs)
bboxes = np.array(self.bbox_list)[idxs]
print("每一类的bboxes集合: ",bboxes)
x_min = np.min(bboxes[:, 0])
y_min = np.min(bboxes[:, 1])
x_max = np.max(bboxes[:, 0] + bboxes[:, 2])
y_max = np.max(bboxes[:, 1] + bboxes[:, 3])
z_min = np.min(bboxes[:, 4])
z_max = np.max(bboxes[:, 4])
class_id = bboxes[0, 5]
new_bbox_list.append([x_min, y_min, z_min, x_max, y_max, z_max, class_id])
return new_bbox_list
def draw_bbox_2d(self, bbox, ax):
x_min, y_min, w, h, z, class_id = bbox
color = self.color_map(class_id)
# print(color)
for xi in [x_min, x_min+w]:
for yi in [y_min, y_min+h]:
ax.plot([xi, xi], [yi, yi], [z, z], color=color, linestyle='dashed')
for xi in [x_min, x_min+w]:
ax.plot([xi, xi], [y_min, y_min+h], [z, z], color=color, linestyle='dashed')
for yi in [y_min, y_min+h]:
ax.plot([x_min, x_min+w], [yi, yi], [z, z], color=color, linestyle='dashed')
def draw_bbox_3d(self, bbox, ax):
x_min, y_min, z_min, x_max, y_max, z_max, class_id = bbox
color = self.color_map(class_id)
for xi in [x_min, x_max]:
for yi in [y_min, y_max]:
ax.plot([xi, xi], [yi, yi], [z_min, z_max], color=color)
for xi in [x_min, x_max]:
for zi in [z_min, z_max]:
ax.plot([xi, xi], [y_min, y_max], [zi, zi], color=color)
for yi in [y_min, y_max]:
for zi in [z_min, z_max]:
ax.plot([x_min, x_max], [yi, yi], [zi, zi], color=color)
def visualize(self, bbox_list=None, new_bbox_list=None):
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
for bbox in bbox_list:
self.draw_bbox_2d(bbox, ax)
for bbox in new_bbox_list:
self.draw_bbox_3d(bbox, ax)
plt.show()
def draw(self):
new_bbox_list = self.get_new_bbox_list()
print(bbox_list,new_bbox_list)
self.visualize(bbox_list, new_bbox_list)
def color_map(self, class_id):
# 假设这里使用映射字典将类别 ID 映射到不同的颜色
color_mapping = {0: 'red', 1: 'blue', 2: 'green'}
return color_mapping.get(class_id, 'black') # 默认为黑色
if __name__ == "__main__":
bbox_list = [
#-------------------------#
#[x, y, w, h, z, class_id]#
#-------------------------#
[100, 200, 50, 50, 0, 0],
[110, 210, 50, 50, 1, 0],
[120, 220, 50, 50, 2, 0],
[130, 230, 50, 50, 3, 0],
[140, 240, 50, 50, 4, 0],
[200, 300, 60, 60, 0, 1],
[210, 310, 60, 60, 1, 1],
[220, 320, 60, 60, 2, 1],
[300, 400, 70, 70, 6, 0],
[310, 410, 70, 70, 7, 0],
[320, 420, 70, 70, 8, 0],
[400, 500, 80, 80, 9, 1],
[410, 510, 80, 80, 10, 1],
[420, 520, 80, 80, 11, 2]
]
bbox_cluster = BBoxClusterv3(bbox_list)
bbox_cluster.cluster()
bbox_cluster.draw()
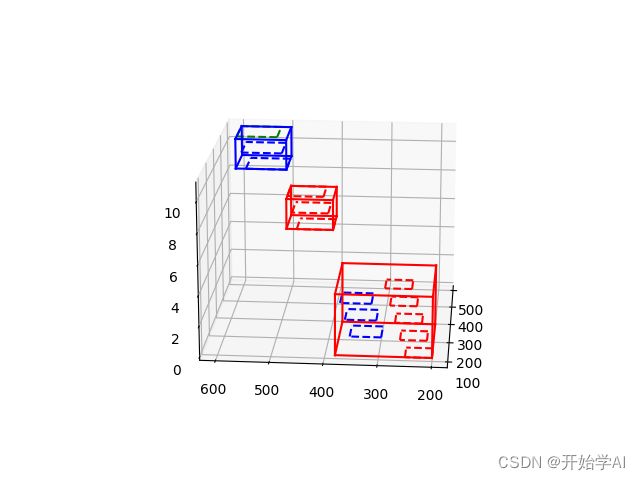
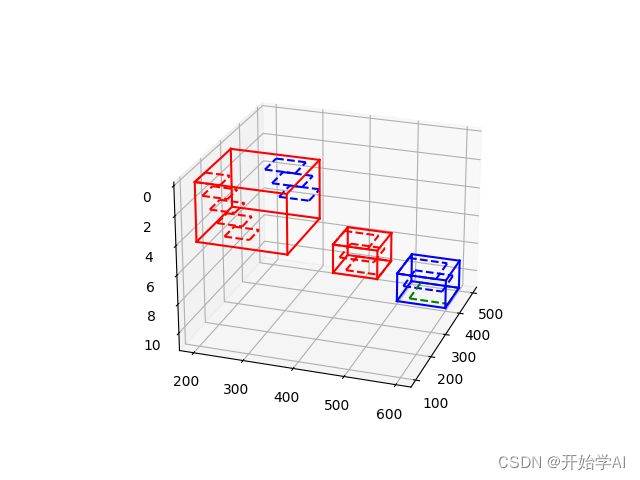
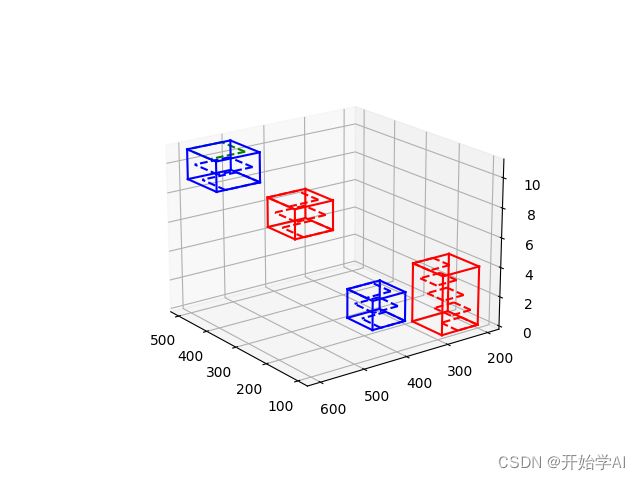
假如有以下几类框
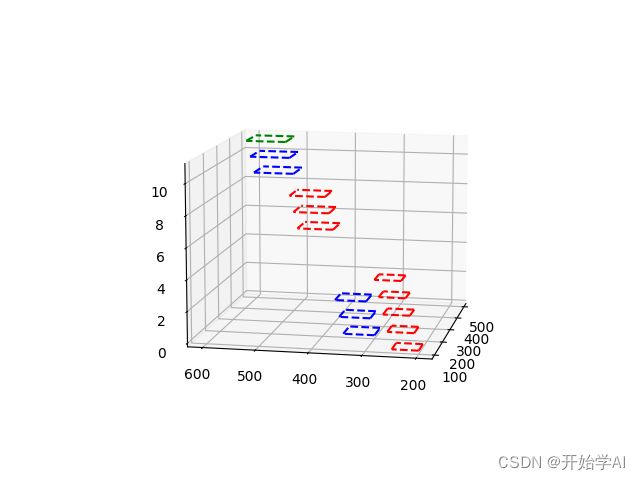
最终聚类效果: