地面分割--Fast Segmentation of 3D Point Clouds for Ground Vehicles论文阅读与源码分析
文章目录
- 1写在前面的话
- 2点云投影分块
- 3地面点云分割
- 4核心代码阅读
-
- 投影分块
- 直线拟合代码
- 分割地面点云
- 5实验效果
- 参考
1写在前面的话
这篇文章属于地面分割领域非常经典的一篇论文,论文具有速度快,在一定程度能适应有坡度的地形,文章主要分为两个阶段:数据投影分块,在分块中寻找地面点。
2点云投影分块
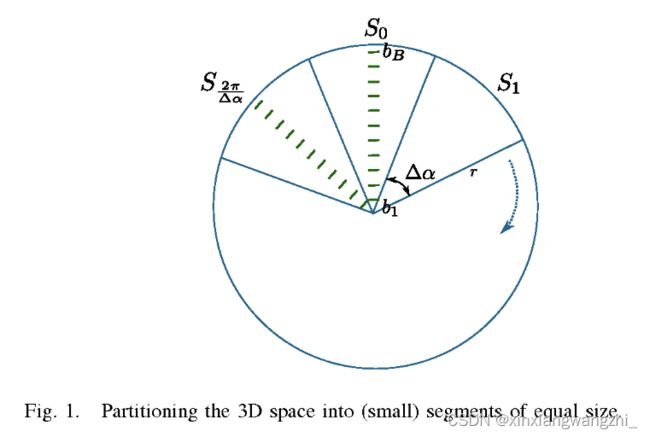
我们首先将点云投影到xy平面,并将其划分为一定数量的点云块,以此来实现地面分割,如图1所示。我们引入了参数 Δ a \Delta a Δa,该参数描述了每个分割块的角度。因此,我们得出了 M = 2 π / Δ a M=2\pi/Δa M=2π/Δa个分割块。分割块对应的原始点云索引用segment(pi)表示,很容易计算:
segment ( p i ) = atan 2 ( y i , x i ) Δ α \operatorname{segment}\left(p_i\right)=\frac{\operatorname{atan} 2\left(y_i, x_i\right)}{\Delta \alpha} segment(pi)=Δαatan2(yi,xi)
atan 2 ( y i , x i ) \operatorname{atan} 2\left(y_i, x_i\right) atan2(yi,xi)表示点云与原点构成的线段与x正方向的夹角,其值在 [ 0 , 2 π ] [0,2\pi] [0,2π]之间。其过程如下图:
我们将segment(pi)对应的3d点云集合表示为:
P s = { p i ∈ P ∣ segment ( p i ) = s } P_s=\left\{p_i \in P \mid \operatorname{segment}\left(p_i\right)=s\right\} Ps={pi∈P∣segment(pi)=s}
这里的 P s P_s Ps是通过分块的索引对应的原始点云为3d点云,而不是2d点云。
为了获得适合于地面平面估计,我们将同一分割块Ps中的所有点云继续划分为许多 b i n j s , j = 1... bin^s_j,j=1... binjs,j=1...。我们用 r m i n j r^min_j rminj和 r m a x j r^max_j rmaxj来表示某一bin覆盖的最小和最大距离。然后如果某一点云满足 r j min ≤ x i 2 + y i 2 < r j max r_j^{\min } \leq \sqrt{x_i^2+y_i^2}
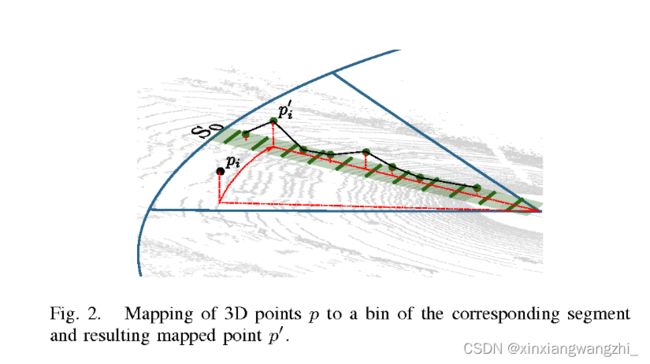
对于一个bin中的点云,我们重新定义一个二维集合:
P b j s ′ = { p i ′ = ( x i 2 + y i 2 z i ) T ∣ p i ∈ P b j s } P_{b_j^s}^{\prime}=\left\{p_i^{\prime}=\left(\sqrt{x_i^2+y_i^2} \quad z_i\right)^T \mid p_i \in P_{b_j^s}\right\} Pbjs′={pi′=(xi2+yi2zi)T∣pi∈Pbjs}
一般而言每个bin( P b j s ′ P_{b_j^s}^{\prime} Pbjs′)中包含很多点,只取一个点表示bin,这个点称为prototype point, 记为 p b j s ′ p_{b_j^s}^{\prime} pbjs′,本文取得z值最小的点。选择prototype point能够简化3d点云提取地面点提取过程,更重要的是,点云地面提取过程和点云数量无关,只和Δa以及bin的数量有关。
3地面点云分割
通过对每个分割块中的prototype points拟合直线提取地面点。这里采用文献[11]所描述的增量式算法。对于直线 y = m x + b y=mx+b y=mx+b,当其满足以下几个条件时,考虑其是地面平面的一部分:
- 1 直线的斜率m不超过阈值 T m T_m Tm,即地面不可能是完全水平的。
- 2 对于小斜率的直线,即$ m
- 3 拟合的直线误差不能超过阈值 T r m s e T_rmse Trmse
- 4 当前直线的起始点,距离上一条拟合出来的直线的距离,不能超过阈值,确保两条直线之间是平滑连接的。
下图为拟合直线的具体方法:
在这里插入图片描述
通过上述方法对于每个分割块,我们能得到很多直线方程,其集合记为 L s = ( m i , b i ) L_s={(m_i,b_i)} Ls=(mi,bi). L s L_s Ls表示分割块的ground plane。现在我们可以通过 L s L_s Ls判断点云是否属于地面点。在分割块的每个点云中计算点云到所有直线端点的距离:
(1)如果该点云到最近的直线端点距离都很大,说明点云距离直线很远,此时采用保守的方法判断该点是否是地面点。
(1)否则,如果点到直线的距离小于阈值,则判断为地面点。
4核心代码阅读
投影分块
//start_index,end_index当前segment中点云起始和终止索引
//cloud所有3d点云
void GroundSegmentation::insertionThread(const PointCloud& cloud,
const size_t start_index,
const size_t end_index)
{
const double segment_step = 2*M_PI / params_.n_segments;//计算Δa
//根据参数指定的每个分割块最大距离和最小距离、bin的数目,计算bin的步长
const double bin_step = (sqrt(params_.r_max_square) - sqrt(params_.r_min_square))
/ params_.n_bins;
const double r_min = sqrt(params_.r_min_square);
for (unsigned int i = start_index; i < end_index; ++i)
{
//计算平面距离range
pcl::PointXYZ point(cloud[i]);
const double range_square = point.x * point.x + point.y * point.y;
const double range = sqrt(range_square);
//如果range在指定的分割块(segment)的范围内再进行别的计算
if (range_square < params_.r_max_square && range_square > params_.r_min_square)
{
//计算平面夹角
const double angle = std::atan2(point.y, point.x);
//计算当前点云所有哪个bin
const unsigned int bin_index = (range - r_min) / bin_step;
//计算当前点云所有哪个分割块
const unsigned int segment_index = (angle + M_PI) / segment_step;
//防止越界
const unsigned int segment_index_clamped = segment_index == params_.n_segments ? 0 : segment_index;
//把这个点云放到对应的分割块的对应的bin中,这里addPoint存的是最低点
segments_[segment_index_clamped][bin_index].addPoint(range, point.z);
//记录该点云所在的分割块及bin
bin_index_[i] = std::make_pair(segment_index_clamped, bin_index);
}
//如果range不在指定的分割块(segment)的范围内不计算
else
{
bin_index_[i] = std::make_pair<int, int>(-1, -1);
}
//构建二维的集合,存放平面距离和z值
segment_coordinates_[i] = Bin::MinZPoint(range, point.z);
}
}
直线拟合代码
//增量式拟合直线,输出为lines_:保存直线的两个端点(d,z)
void Segment::fitSegmentLines()
{
// Find first point.bins_:当前分割块segment对应的所有二维集合(d,z),每个bin只有一个点
auto line_start = bins_.begin();
while (!line_start->hasPoint()) {
++line_start;
// Stop if we reached last point.
if (line_start == bins_.end()) return;
}
// Fill lines.
bool is_long_line = false;
double cur_ground_height = -sensor_height_;//地面高度
//当前直线集合中的所有二维点
std::list<Bin::MinZPoint> current_line_points(1, line_start->getMinZPoint());
LocalLine cur_line = std::make_pair(0,0);
//从第二个bin开始遍历分割块的所有bin
for (auto line_iter = line_start+1; line_iter != bins_.end(); ++line_iter)
{
if (line_iter->hasPoint())
{
//找到该bin的二维点,d,z
Bin::MinZPoint cur_point = line_iter->getMinZPoint();
//计算当前bin与上个bin的d之差,如果大于阈值,则认为是一个长直线
if (cur_point.d - current_line_points.back().d > long_threshold_)
{
is_long_line = true;
}
//如果当前直线多于两个点
if (current_line_points.size() >= 2)
{
// Get expected z value to possibly reject far away points.
double expected_z = std::numeric_limits<double>::max();
if (is_long_line && current_line_points.size() > 2)
{
expected_z = cur_line.first * cur_point.d + cur_line.second;
}
//存放bin(二维点)
current_line_points.push_back(cur_point);
//利用所有点去拟合直线,返回斜率m和截距b
cur_line = fitLocalLine(current_line_points);
//计算点到直线的最大距离(误差)
const double error = getMaxError(current_line_points, cur_line);
// Check if not a good line.
//如果不是一个符合条件的直线
if (error > max_error_ ||
std::fabs(cur_line.first) > max_slope_ ||
(current_line_points.size() > 2 && std::fabs(cur_line.first) < min_slope_) ||
is_long_line && std::fabs(expected_z - cur_point.z) > max_long_height_)
{
// Add line until previous point as ground.
//删除刚刚放进来的点
current_line_points.pop_back();
//这里是干嘛的??
// Don't let lines with 2 base points through.
if (current_line_points.size() >= 3)
{
//删除当前bin之后重新拟合直线
const LocalLine new_line = fitLocalLine(current_line_points);
//重新拟合的直线也不一定是好的,为什么还pushback?
lines_.push_back(localLineToLine(new_line, current_line_points));
cur_ground_height = new_line.first * current_line_points.back().d + new_line.second;
}
// Start new line.
is_long_line = false;
//清空当前直线所有bin
current_line_points.erase(current_line_points.begin(), --current_line_points.end());
//回到上个bin
--line_iter;
}
// Good line, continue.
else { }
}
//如果点云数量少于2,添加点
else
{
// Not enough points.
//添加的点要求距离不能太远,并且不能距离地面太远
if (cur_point.d - current_line_points.back().d < long_threshold_ &&
std::fabs(current_line_points.back().z - cur_ground_height) < std::abs(max_start_height_))
{
// Add point if valid.
current_line_points.push_back(cur_point);
}
else
{
// Start new line.
current_line_points.clear();
current_line_points.push_back(cur_point);
}
}
}
}
// Add last line.
//如果bin没有点云则中断该次直线拟合
if (current_line_points.size() > 2) {
const LocalLine new_line = fitLocalLine(current_line_points);
lines_.push_back(localLineToLine(new_line, current_line_points));
}
}
//计算直线的端点,这里的端点是通过直线方程计算得到的理论值,不是点云的实际值
Segment::Line Segment::localLineToLine(const LocalLine& local_line,const std::list<Bin::MinZPoint>& line_points)
{
Line line;
const double first_d = line_points.front().d;
const double second_d = line_points.back().d;
const double first_z = local_line.first * first_d + local_line.second;
const double second_z = local_line.first * second_d + local_line.second;
line.first.z = first_z;
line.first.d = first_d;
line.second.z = second_z;
line.second.d = second_d;
return line;
}
分割地面点云
void GroundSegmentation::assignClusterThread(const unsigned int &start_index,
const unsigned int &end_index,
std::vector<int> *segmentation)
{
const double segment_step = 2*M_PI/params_.n_segments;
for (unsigned int i = start_index; i < end_index; ++i)
{
//segment_coordinates_存放的是所有点的二维坐标(在投影分块过程中已经进行处理了)
//找到点云对应的二维坐标(d,z)
Bin::MinZPoint point_2d = segment_coordinates_[i];
//找到点云所在的分块segment的索引
const int segment_index = bin_index_[i].first;
if (segment_index >= 0)
{
//计算点云到所在的分块segment的直线的距离
double dist = segments_[segment_index].verticalDistanceToLine(point_2d.d, point_2d.z);
// Search neighboring segments.
int steps = 1;
while (dist < 0 && steps * segment_step < params_.line_search_angle) {
// Fix indices that are out of bounds.
int index_1 = segment_index + steps;
while (index_1 >= params_.n_segments) index_1 -= params_.n_segments;
int index_2 = segment_index - steps;
while (index_2 < 0) index_2 += params_.n_segments;
// Get distance to neighboring lines.
//计算点云到所在的分块segment的相邻两个segment的直线的距离(这里和论文稍有不同)
const double dist_1 = segments_[index_1].verticalDistanceToLine(point_2d.d, point_2d.z);
const double dist_2 = segments_[index_2].verticalDistanceToLine(point_2d.d, point_2d.z);
//经过上述计算一共有3个dist,取最小的dist
if (dist_1 >= 0) {
dist = dist_1;
}
if (dist_2 >= 0) {
// Select smaller distance if both segments return a valid distance.
if (dist < 0 || dist_2 < dist) {
dist = dist_2;
}
}
++steps;
}
//距离小于阈值则判定为地面点
if (dist < params_.max_dist_to_line && dist != -1) {
segmentation->at(i) = 1;
}
}
}
}
//计算到最近的直线的距离,这里利用直线拟合(void Segment::fitSegmentLines())的结果line_变量
double Segment::verticalDistanceToLine(const double &d, const double &z) {
static const double kMargin = 0.1;
double distance = -1;
//这里写的有点疑问
for (auto it = lines_.begin(); it != lines_.end(); ++it)
{
if (it->first.d - kMargin < d && it->second.d + kMargin > d)
{
const double delta_z = it->second.z - it->first.z;
const double delta_d = it->second.d - it->first.d;
const double expected_z = (d - it->first.d)/delta_d *delta_z + it->first.z;
distance = std::fabs(z - expected_z);
}
}
return distance;
}
5实验效果
原始点云:(存在一定坡度)
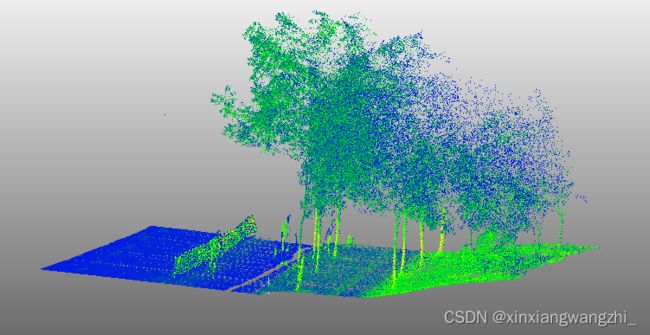
地面分割:(对坡度适用性不是很好)

参考
原文:《Fast Segmentation of 3D Point Clouds for Ground Vehicles》
github
博客1
2
3
4