论文笔记:SIFT(Scale-invariant feature transform 尺度不变特征变换)
1.SIFT介绍
1.1.介绍
SIFT(Scale-invariant feature transform 尺度不变特征变换)图像特征匹配,即使图像有旋转、模糊、尺度、亮度的变化,即使使用不同的相机,即使图像拍摄的角度不同,SIFT总能检测到稳定的特征点。SIFT是人工设计特征的一个巅峰。
SIFT算法由加拿大英属哥伦比亚大学教授David Lowe 于 1999 年发表于会议ICCV ,原论文Object recognition from local scale-invariant features ,David Lowe 是唯一作者。
广为人知的被引用更多的是2004年发表于期刊IJCV的完善版 Distinctive image features from scale-invariant keypoints。 本文就是基于此论文翻译总结的。
2020年3月6日专利到期,可以免费试用。OpenCV里有。
2.算法简介
包括下面四部分:
1.尺度空间极值检测-关键点检测:使用 高斯差分difference-of-Gaussian 方法识别潜在的关键点(特征点),其中这些特征点对尺度、方向是不变的。
2.关键点确定:对每个候选的关键点,最终确定其是否合适及位置和尺度。
3.关键点方向指定:一个或者多个方向基于图片的梯度方向指定到每个关键点(keypoint location)。
4.关键点描述符:梯度、尺度、位置都确定了。然后转换成一种表达,它能有效应对图片扭曲、光照等情况。
5.最终检测时,会有一个数据库,里面存了大量训练的图片特征数据,然后用检测的图片和数据库中特征比较,发现足够匹配的特征就可以识别出来,至少有3个特征匹配吧。
下面章节会就此四部分分别介绍下。
3.尺度空间极值检测-关键点检测
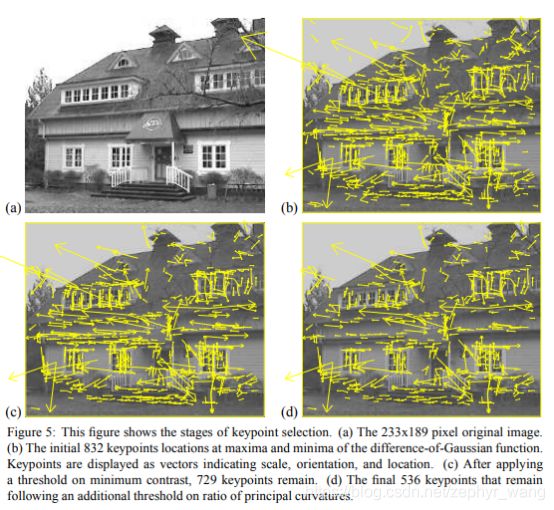
本节的主要目的是完成下图的b图,找到一堆关键点(keypoint),如下图黄色箭头所示,包含尺度大小、方向、位置。主要是通过difference-of-Gaussian 方法。
3.1.高斯差分difference-of-Gaussian
输入图片I(x,y)。高斯函数G(x,y,ó)。
图片的尺度空间函数L(x,y,ó)等输入图片I(x,y)与高斯函数G(x,y,ó)的卷积。如下所示:
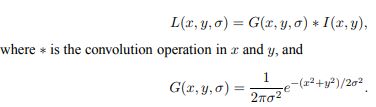
高斯差分D(x,y,ó):由两个邻近的尺度差分计算所得。两个邻近的尺度由一个常数相乘因子k分割。公式如下:

参考热传导方程,得到
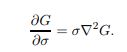
@G/@ó可以近似等于相邻尺度kó与ó的差分,故有下式:
Mikolajczyk (2002) 发现![]() 的极大极小值,相比于梯度方法、Hessian、Harris corner等方法,可以产生非常稳定的图片特征。上式刚好使高斯差分D(x,y,ó)函数满足
的极大极小值,相比于梯度方法、Hessian、Harris corner等方法,可以产生非常稳定的图片特征。上式刚好使高斯差分D(x,y,ó)函数满足![]() 。其中k-1可以看做一个常数,比如取
。其中k-1可以看做一个常数,比如取![]() 。
。
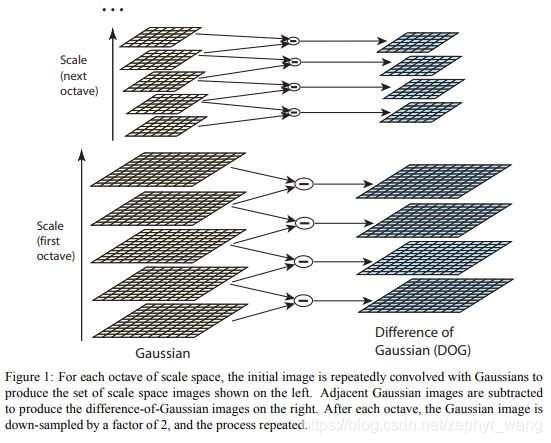
下图是高斯差分D(x,y,ó)示意图,左边是一堆间隔的尺度空间图片,相邻的两个相减产生高斯差分图像(右侧的)。比如下图是两个scale(s=2),![]() ,对于每个octave产生5(s+3)张图片(左侧的),相邻的相减产生右侧的高斯差分图。不断的用两倍的ó来产生scale。下面章节会说到,产生3个scale就可以了。
,对于每个octave产生5(s+3)张图片(左侧的),相邻的相减产生右侧的高斯差分图。不断的用两倍的ó来产生scale。下面章节会说到,产生3个scale就可以了。
3.2.本地极值检测
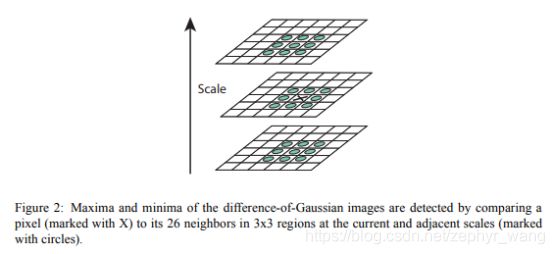
如下图所示,每个高斯差分和本层附件的8个点以及上下相邻尺度的各9个点,总共26(2*9+8)个点比较,选出最大值或最小值。
3.3.在尺度上的采用频率
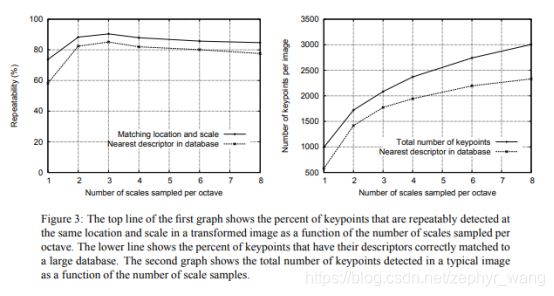
即分析几个scale就可以了,从下图(左图)看到,3个scale就效果很好了。横轴是scale的数量,纵轴代表在图片的相同位置和尺寸下重复检测到的特征点比例。
3.4.在空间域的采用频率
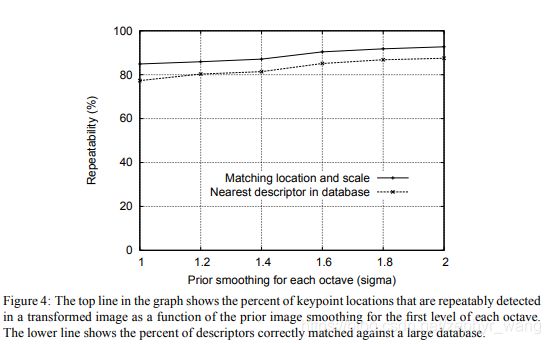
主要是分析ó的值,如下图,可以看到取ó=1.6就可以了。横轴是ó的大小,纵轴是特征位置(keypoint location)被重复检测到的比例。
4.关键点确定
如前所述,本节主要是针对上一步产生的候选关键点进行筛选。
对D(x,y,ó)用了泰勒展开式。其中D及其衍生是基于采样点评估的,![]() 是基于采样点的偏移量。
是基于采样点的偏移量。
上式求导算极值,得到![]() 。
。
进而得到:
![]()
在第3章节的图c就是去除了![]() 小于0.03后得到的。
小于0.03后得到的。
4.1.去除边缘的响应
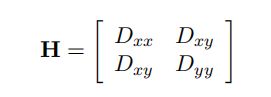
高斯差分会产生强烈的边缘响应,所以需要去除。高斯差分中一个不明显的波峰在其沿着边缘会产生大的主曲率,却有小的正交方向。主曲率可以从一个2*2的Hessian 矩阵 H计算得到,H公式如下:
可以不用直接计算H,而是计算比率r,比率容易计算。
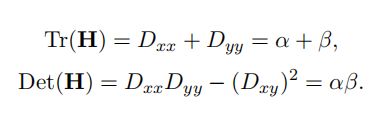
![]()
从而,

最终有下式,只要满足下式的关键点就不去除,实验发现取r=10.
在第3章节的图d就是去除了主曲率不符合条件后得到的。
5.关键点方向指定
对于图片L(x,y),梯度大小定义为m(x,y),方向定义为θ(x,y),它们可以由像素的差分计算所得,公式如下:

6.关键点描述符(keypoint descriptor)
6.1.描述符的形式
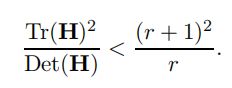
就是著名的下图了,左图是每个采样点的梯度大小和方向,圆圈是高斯圈。每个采样依据梯度大小、高斯圈形成方向直方图,然后加总形成右图,其中右图每个箭头的长度代表该区域某方向上梯度大小的和。
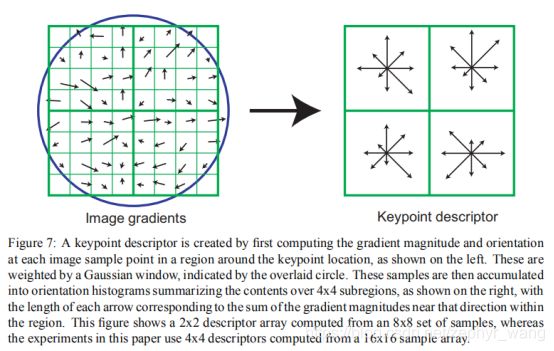
6.2.描述符的测试
从下图看到采用4*4descriptor、8 orientation可以产生良好的效果,本论文采用的此方式,会产生一个带有128维的特征向量。

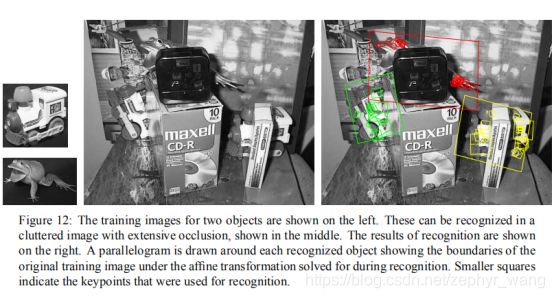
7.物体检测案例
如下图,及时物体被挡在一部分,也是可以检测到的。