C51学习———定时器中断
目录
- 定时器
-
- 1.简介
- 2.概念解读
- 3. 定时器怎么定时
- 4. 定时器编程
- 中断
-
- 概念
- 中断结构
- 中断优先级
- 中断函数的格式
- PWM开发SG90
-
- 简介
- 如何实现PWM信号输出
- 控制舵机
- 超声波测距
-
- 简介
- 时序图
- 开盖垃圾桶
-
- 功能描述
定时器
1.简介
C51中的定时器和计数器是同一个硬件电路支持的,通过寄存器配置不同,就可以将他当做定时器
或者计数器使用。
确切的说,定时器和计数器区别是致使他们背后的计数存储器加1的信号不同。当配置为定时器使
用时,每经过1个机器周期,计数存储器的值就加1。而当配置为计数器时,每来一个负跳变信号
(信号从P3.4 或者P3.5引脚输入),就加1,以此达到计数的目的。
标准C51有2个定时器/计数器:T0和T1。他们的使用方法一致。C52相比C51多了一个T2
2.概念解读
- 定时器和计数器,电路一样
- 定时或者计数的本质就是让单片机某个部件数数
- 当定时器用的时候,靠内部震荡电路数数
- 当计数器用的时候,数外面的信号,读取针脚的数据
3. 定时器怎么定时
定时器的本质原理: 每经过一个机器周期,就加1 :寄存器
- 什么是晶振?
晶振(晶体震荡器),又称数字电路的“心脏”,是各种电子产品里面必不可少的频率元器件。数字电
路的所有工作都离不开时钟,晶振的好坏、晶振电路设计的好坏,会影响到整个系统的稳定性。
- 什么是时钟周期
-时钟周期也称为振荡周期,定义为时钟频率的倒数。时钟周期是计算机中最基本的、最小的时间单
位。在一个时钟周期内,CPU仅完成一个最基本的动作。时钟周期是一个时间的量。更小的时钟周 期就意味着更高的工作频率
- 什么是机器周期
机器周期也称为CPU周期。在计算机中,为了便于管理,常把一条指令的执行过程划分为若干个阶
段(如取指、译码、执行等),每一阶段完成一个基本操作。完成一个基本操作所需要的时间称为
机器周期。一般情况下,一个机器周期由若干个时钟周期组成
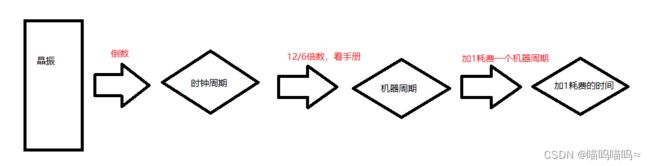
- 加1经过了多少时间?
- 当晶振频率是11.0592MHz的时候,等于11059.2KHz = 11059200Hz
机器周期 = 12 x 时钟周期 =12 x (1/时钟频率) 秒 = 12 / 时钟频率 秒 = 12 / 11059200 秒 = 12
000 000 / 11059200 微秒 = 1.085 微秒
4. 定时器编程
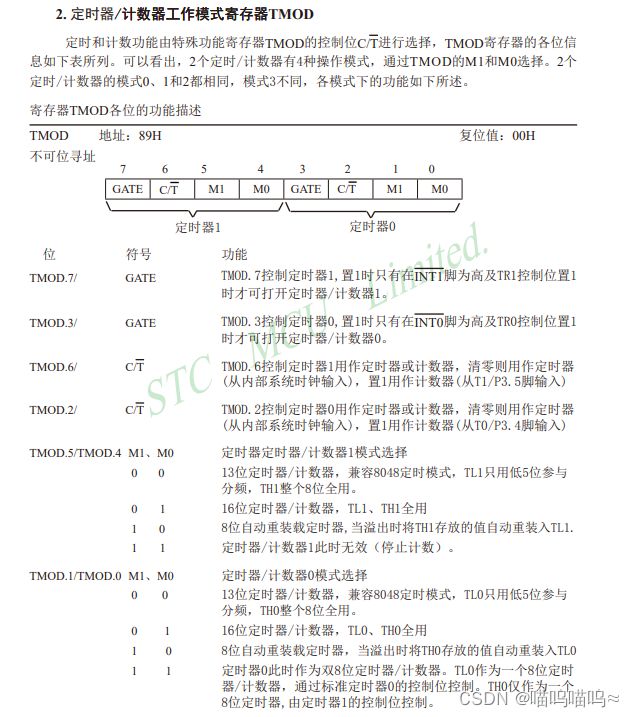
定时器/计数器0和1的相关寄存器
配置TMOD,就是配置工作寄存器工作模式

定时器模式寄存器:TMOD来选择定时器模式,选择工作方式1,TMOD的bit0 bit1配置成0 1 :16
的定时器功能
配置TCON,就是配置定时器/计数器

- 怎么知道爆表
TCON寄存器的bit5(TF0)能表示爆表:当爆表的时候,硬件会修改bit5(TF0)位上面的数据,改成1(置1),如果不用中断,我们代码清零
- 怎么开始计时
-TCON寄存器的bit4,通过编程让这个位为1的时候,开始计时,相当于按下了闹钟
- 关于TH0/1和TL0/1寄存器 -
- 在哪里加1,最大计数时间,也就是爆表了能计算多长
在TH0/1和TL0/1寄存器中加1,默认是从0开始数数,最多能数65536下,累计计时71ms
- 如何算出10ms定时器的初值
-就不让他从0开始数数,10ms需要数9216下,你让他从65536-9126=56320(16进制表示为
0xDC00)开始数数 这样TL0=0x00;TH0=0xDC
关于配置寄存器的一些置位操作
四个二进制数表示一位的16进制数
8421法进制的转换(方便人类来看,对计算机底层来说,不关心进制010101010)
配寄存器推荐用按位操作,清零的时候,对应的需要清零的位与上0,不需要清零的位与上1置1的时候,需要置1的位置或1,不需要置一的位置或0
中断
概念
在处理器中,中断是一个过程,即CPU在正常执行程序的过程中,遇到外部/内部的紧急事件需要处理,暂时中止当前程序的执行,转而去处理紧急的事物,待处理完毕后再返回被打断的程序处继续往下执行。中断在计算机多任务处理,尤其是即时系统尤为重要。比如uCOS,FreeRTOS等。
意义:
中断能提高CPU的效率,同事能够对突发事件做出实时处理。实现程序的并行化,实现嵌入式系统进程之间的切换。
中断结构

中断寄存器

由上面看出,假如CPU能响应定时器0中断的条件:需要配置IE寄存器的bit1: ET0 bit7:EA,即
- ET0中断允许要置一 ET0 = 1
- EA总中断要置一 EA = 1
中断优先级
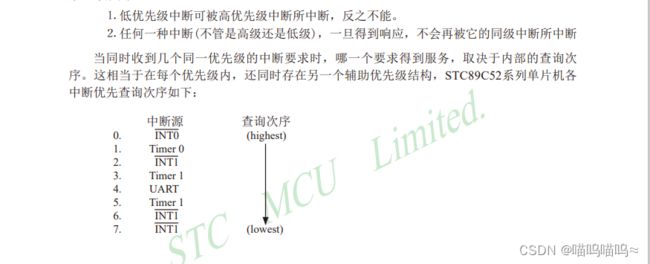
中断函数的格式
如果使用C语言编程,中断查询次序号就是中断号,例如:
void Int0_Routine(void) interrupt 0;
void Timer0_Rountine(void) interrupt 1;
void Int1_Routine(void) interrupt 2;
void Timer1_Rountine(void) interrupt 3;
void UART_Routine(void) interrupt 4;
void Timer2_Routine(void) interrupt 5;
void Int2_Routine(void) interrupt 6;
void Int3_Routine(void) interrupt 7;
中间名字可以自行改
/*******************************************************
*********定时器中断控制LED每隔1秒亮灭一次********************
*****main中控制另外一个灯每个300ms亮灭一次,有点多线程的意思了***
*******************************************************/
#include "reg52.h"
sbit led = P3^6;
sbit led1 = P3^7;
int cnt = 0;
void Time0Init()
{
//1. 配置定时器0工作模式位16位计时
TMOD = 0x01;
//2. 给初值,定一个10ms出来
TL0=0x00;
TH0=0xDC;
//3. 开始计时
TR0 = 1;
TF0 = 0;
//4. 打开定时器0中断
ET0 = 1;
//5. 打开总中断EA
EA = 1;
}
void Delay300ms() //@11.0592MHz
{
unsigned char i, j, k;
i = 3;
j = 26;
k = 223;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void main()
{
led = 1;
Time0Init();
while(1){
led1 = 0;
Delay300ms();
led1 = 1;
Delay300ms();
}
}
void Time0Handler() interrupt 1
{
cnt++; //统计爆表的次数
//重新给初值
TL0=0x00;
TH0=0xDC;
if(cnt == 100){//爆表100次,经过了1s
cnt = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1s
led = !led;//每经过1s,翻转led的状态
}
}
PWM开发SG90
简介
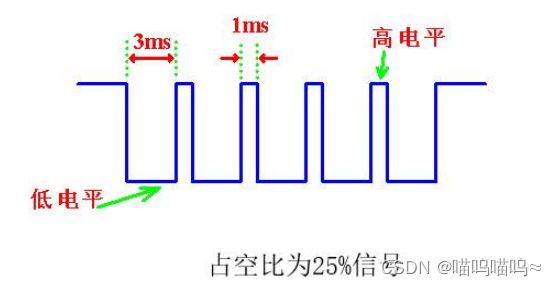
PWM,英文名Pulse Width Modulation,是脉冲宽度调制缩写,它是通过对一系列脉冲的宽度进
行调制,等效出所需要的波形(包含形状以及幅值),对模拟信号电平进行数字编码,也就是说通
过调节占空比的变化来调节信号、能量等的变化,占空比就是指在一个周期内,信号处于高电平的
时间占据整个信号周期的百分比,例如方波的占空比就是50%
- 通过占空比编码模拟信号
- 占空比 一个周期内,高电平占据时长的百分比
如何实现PWM信号输出
- 通过芯片内部模块输出,一般观察手册或者芯片IO口都会标明这个是否是PWM口
如下图增强51,STC15w的CPU

- 如果没有集成PWM功能,可以通过IO口软件模拟,相对硬件PWM来说精准度略差
控制舵机
什么是舵机?
如下图所示,最便宜的舵机sg90,常用三根或者四根接线,黄色为PWM信号控制
用处:垃圾桶项目开盖用、智能小车的全比例转向、摄像头云台、机械臂等
常见的有0-90°、0-180°、0-360°

- 怎么控制舵机
向黄色信号线“灌入”PWM信号 - PWM波的频率不能太高,大约50HZ,即周期=1/频率=1/50=0.02s,20ms左右
数据:
0.5ms-------------0度; 2.5% 对应函数中占空比为250
1.0ms------------45度; 5.0% 对应函数中占空比为500
1.5ms------------90度; 7.5% 对应函数中占空比为750
2.0ms-----------135度; 10.0% 对应函数中占空比为1000
2.5ms-----------180度; 12.5% 对应函数中占空比为1250
例如定时器需要定时20ms, 关心的单位0.5ms, 40个的0.5ms,初值0.5ms cnt++
20ms = 0.5ms * 40
3.编程实现

/*******************************************************
*********舵机黄色信号线接P1.1口,每隔2秒从0度到135度切换********
*************注意:初值不要算错,修改位置两个地方**************
*******************************************************/
#include 超声波测距
简介
超声波测距模块是用来测量距离的一种产品,通过发送和收超声波,利用时间差和声音传播速度, 计算出模块到前方障碍物的距离。
型号:HC-SR04

接线参考:模块除了两个电源引脚外,还有TRIG,ECHO引脚,这两个引脚分别接我们开发板的P1.5和P1.6端口
- 怎么让它发送波
Trig ,给Trig端口至少10us的高电平
- 怎么知道它开始发了
Echo信号,由低电平跳转到高电平,表示开始发送波 怎么知道接收了返回波
Echo,由高电平跳转回低电平,表示波回来了
- 怎么算时间
Echo引脚维持高电平的时间! 波发出去的那一下,开始启动定时器 波回来的拿一下,我们开始停止定时器,计算出中间经过多少时间
- 怎么算距离
距离 = 速度 (340m/s)* 时间/2
时序图

#include 开盖垃圾桶
功能描述
检测靠近时,垃圾桶自动开盖并伴随滴一声,2秒后关盖
发生震动时,垃圾桶自动开盖并伴随滴一声,2秒后关盖
硬件说明
SG90舵机,超声波模块,震动传感器,蜂鸣器
接线说明
舵机控制口 P1.1;
超声波Trig接 P1.5 ,Echo接 P1.6 ;
蜂鸣器接 P1.2 口;
震动传感器接 P3.2`口(外部中断0)
源码
#include