(学习笔记-进程管理)进程调度
进程都希望自己能够占用CPU进行工作,那么这涉及到前面说过的进程上下文切换。
一旦操作系统把进程切换到运行状态,也就意味着该进程占用着CPU在执行,但是操作系统把进程切换到其他状态的时候,就不能在CPU中执行了,于是操作系统会选择下一个要运行的进程。
选择一个进程运行这一功能是在操作系统中完成的,通常称为调度程序(scheduler)。
调度时机
在进程的生命周期中,当进程从一个运行状态到另一个状态变化的时候,其实就会触发一次调度。
比如:
- 从就绪态 -> 运行态:当进程被创建的时候,会进入到就绪队列,操作系统会从就绪队列选择一个进程运行
- 从运行态 -> 阻塞态:当进程发生I/O事件而阻塞时,操作系统必须选择另外一个进程运行
- 从运行态 ->结束态:当进程退出结束后,操作系统得从就绪队列选择另外一个进程运行
因为,这些状态变化的时候,操作系统是需要考虑是否要让新的进程给CPU运行,或者是否让当前进程从CPU上退出来而换到另一个进程运行。
另外如果硬件时钟提供某个频率的周期性中断,那么可以根据如何处理时钟中断,把调度算法分为两类:
- 非抢占式调度算法挑选一个进程,然后让该进程运行直到被阻塞,或者直到该进程退出,才会调用另一个进程,也就是说不会管时钟中断这个事情
- 抢占式调度算法挑选一个进程,然后让该进程只允许某段时间,如果在该时间段结束时,该进程仍然在运行,则会将其挂起,接着调度程序从就绪队列中挑选另外一个进程。这种抢占式调度处理,需要在时间间隔的末端发生时钟中断,以便把CPU控制返回给调度程序进行调度,也就是时间片机制
调度原则
原则一:如果运行的程序发生了I/O事件的请求,那么CPU使用率肯定很低,因为此时进程在阻塞等待硬盘的数据返回。这样的过程势必会造成CPU突然的空闲。所以,为了提高CPU利用率,在这种发送I/O事件致使CPU空闲的情况下,调度程序需要从就绪队列中选择一个进程来运行。
原则二:有的程序执行某个任务花费的时间会比较长,如果这个程序一直占用着CPU,会造成系统吞吐量(CPU单位时间内完成的进程数量)的降低。所以,要提高系统的吞吐率,调度程序要权衡长任务和短任务进程的运行完成数量。
原则三:从进程开始到结束的过程中,实际上是包含两个时间,分别是进程运行时间和进程等待时间,这两个时间总和就称为周转时间。进程的周转时间越小越好,如果进程的等待时间很长而运行的时间很短,那周转时间就很长,这不是我们所希望的,调度程序应该避免这种情况发生。
原则四:处于就绪队列的进程,也不能等太久,当然希望这个等待的时间越短越好,这样可以使得进程更快的在CPU中执行。所以,就绪队列中进程的等待时间也是调度程序所需要考虑的原则。
原则五:对于鼠标、键盘这种交互式比较强的应用,我们当然希望它的响应时间越快越好,否则就会影响用户体验。所以,对于交互式比较强的应用,响应时间也是调度程序需要考虑的原则。

针对上面的五种调度原则,总结成如下:
- CPU利用率:调度程序应确保CPU是始终匆忙的状态,这可以提高CPU的利用率
- 系统吞吐量:吞吐量表示的是单位时间内CPU完成进程的数量,长时间的进程会占用较长的CPU资源,因此会降低吞吐量,相反,短作业的进程会提升系统吞吐量
- 周转时间:周转时间是进程运行 + 阻塞时间 + 等待时间的总和,一个进程的周转时间越小越好
- 等待时间:这个等待时间不是阻塞状态的时间,而是进程处于就绪队列的时间,等待时间越长,用户越不满意
- 响应时间:用户提交请求到系统第一次产生响应所花费的时间,在交互式系统中,响应时间是衡量调度算法好坏的主要标准。
调度算法
不同的调度算法适用的场景也是不同的。
单核CPU系统中常见的调度算法:
先来先服务调度算法
最简单的一个调度算法,就是非抢占式的先来先服务算法(FCFS):

每次从就绪队列选择最先进入队列的进程,然后一直运行,直到进程退出或被阻塞,才会继续从队列中选择第一个进程接着运行。
这似乎很合理,但是当一个作业先运行了,那么后面的短作业等待的时间就会很长,不利于短作业。
FCFS对长作业有利,适用于CPU繁忙型作业的系统,而不适用于I/O繁忙型作业的系统。
最短作业优先调度算法
最短作业优先(SJF)调度算法,它会优先选择运行时间最短的进程来运行,这有助于提高系统的吞吐量。

这显然对长作业不利,很容易造成一种极端现象。
比如,一个长作业在就绪队列等待运行,而这个就绪队列有非常多的短作业,那么就会使得长作业不断地往后推,周转时间边长,致使长作业长期不会被运行。
高响应比优先调度算法
前面的 [先来先服务调度算法] 和 [最短作业优先调度算法] 都没有很好的权衡短作业和长作业。
那么,高响应比优先(HRRN)调度算法主要是权衡了短作业和长作业。
每次进行进程调度时,先计算 [响应比优先级] ,然后把 [响应比优先级]最高的进程投入运行, [响应比优先级]的计算公式:

从上面的公式可以发现:
- 如果两个进程的 [等待时间] 相同, [要求的服务时间] 越短,[响应比] 就越高,这样短作业的进程容易被选中运行
- 如果两个进程 [要求的服务时间] 相同时, [等待时间] 越长,[响应比] 就越高,这就兼顾到了长作业的进程,因为进程的响应比可以随时间等待的增加而提高,当其等待时间足够长时,其响应比便可以升到很高,从而获得运行的机会;
但是进程要求的服务时间是不可知的,所以高响应比优先调度算法是理想型的调度算法,现实中是实现不了的。
时间片轮转调度算法
最古老,最简单,最公平且最广泛的算法就是时间片轮转(RR)调度算法。

每一个进程被分配一个时间段,称为时间片,即允许该进程在该时间段中运行。
- 如果时间片用完,进程还在运行,那么将会把此进程从CPU释放出来,并把CPU分配给另外一个进程
- 如果该进程在时间片结束前阻塞或结束,则CPU立即进行切换
另外,时间片的长度就是一个很关键的点:
- 如果时间片设的太短会导致过多的进程上下文切换,降低了CPU效率
- 如果设的太长了又可能引起对短作业进程的响应时间变长
一般来说,时间片设为 20ms~50ms 通常是一个比较合理的折中值
最高优先级调度算法
前面的 [时间片轮转算法] 做了个假设,即让所有的进程同等重要,大家的运行时间都是一样。
但是,对于用户计算机系统,它们希望调度是有优先级的,即希望调度程序能从就绪队列中选择最高优先级的进程进行运行,这称为最高优先级(HPF)算法。
进程的优先级可以分为,静态优先级和动态优先级:
- 静态优先级:创建进程的时候,就已经确定了,然后整个运行时间优先级都不会变化
- 动态优先级:根据进程的动态变化调整优先级,比如如果进程运行时间增加,则降低其优先级,如果进程等待时间(就绪队列的等待时间)增加,则升高其优先级,也就是随着时间的推移增加等待进程的优先级
该算法也有两种处理优先级的方法,非抢占式和抢占式:
- 非抢占式:当就绪队列中出现优先级高的进程,运行完当前进程,再选择优先级高的进程
- 抢占式:当就绪队列中出现优先级高的进程,当前进程挂起,调度优先级高的进程运行
但是依然有缺点,可能会导致低优先级的进程永远不会运行。
多级反馈队列调度算法
多级反馈队列(MFQ)调度算法是 [时间片轮转算法] 和 [最高优先级算法] 的综合和发展。
- [多级] 表示有多个队列,每个队列的优先级从高到低,同时优先级越高时间片越短
- [反馈] 表示如果有新的进程加入优先级高的队列时,立刻停止当前正在运行的进程,转而去运行优先级高的队列
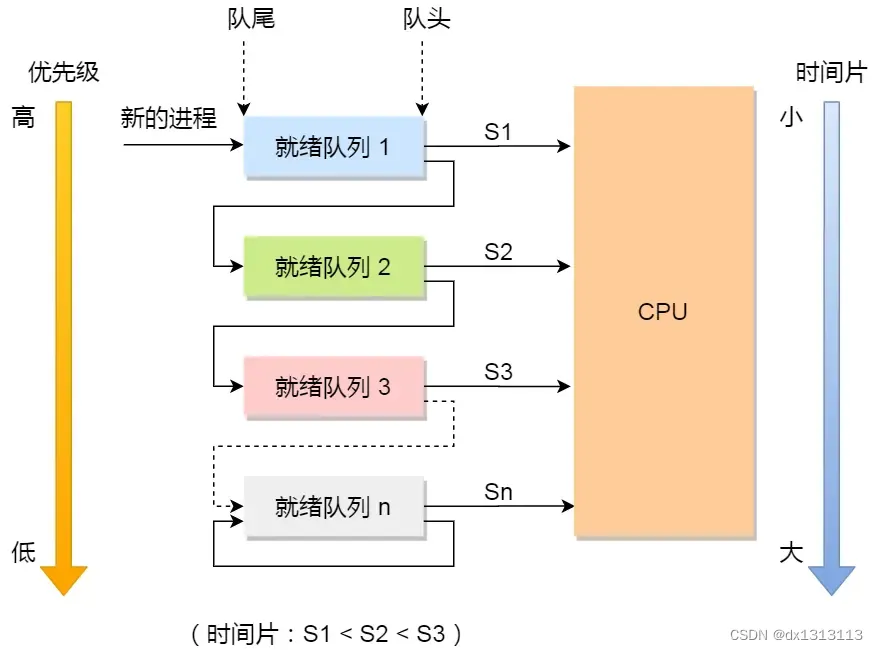
工作方式:
- 设置多个队列,赋予每个队列不同的优先级,每个队列优先级从高到低,同时优先级越高时间片越短
- 新的进程会被放入到第一级队列的末尾,按先来先服务的原则排队等待调度,如果在第一级队列规定的时间片没运行完成,则将其转入到第二级队列的末尾,以此类推,直至完成
- 当较高优先级的队列为空,才调度较低优先级的队列中的进程运行。如果进程运行时,有新进程进入较高优先级的队列,则停止当前运行的进程并将其移入到原队列末尾,接着让较高优先级的进程运行。
可以发现,对于短作业可能可以在第一级队列很快被处理完成。对于长作业,如果在第一级队列处理不完,可以移入下次队列等待被执行,虽然等待时间变长了,但是运行时间也变长了,所以该算法很好的兼顾了长短作业,同时有较好的响应时间。