使用 PyTorch 逐步检测单个对象
一、说明
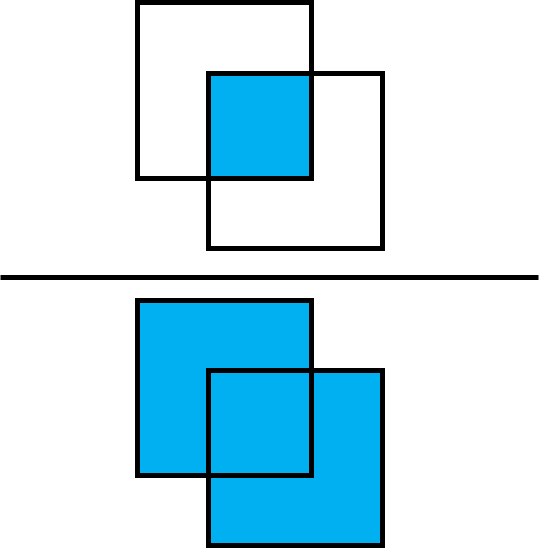
在对象检测任务中,我们希望找到图像中对象的位置。我们可以搜索一种类型的对象(单对象检测,如本教程所示)或多个对象(多对象检测)。通常,我们使用边界框定义对象的位置。有几种方法可以表示边界框:
- 左上角的宽度和高度点 — [x0, y0, w, h],其中 x0 是框的左侧,y0 是框的顶部,w 和 h 分别是框的宽度和高度。
- 左上点和右下点 — [x0 ,y0 ,x1 ,y1],其中 x0 是框的左侧,y0 是框的顶部,x1 是框的右侧,y1 是框的底部。
- 具有宽度和高度的中心点 — [xc, yc, w, h],其中 xc 是框中心的 x 坐标,yc 是框中心的 y 坐标,w 和 h 分别是框的宽度和高度。
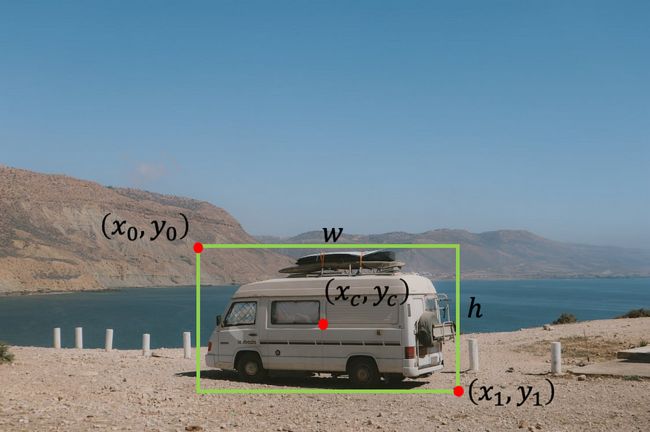
照片由Pexels的Indiana Barriopedro拍摄,由作者编辑。
在本教程中,我们将重点介绍在iChallenge-AMD竞赛的医学眼部图像中找到中央凹的中心。
二、获取数据
我们将使用年龄相关性黄斑变性(AMD)患者的眼睛图像。

来自 AMD 数据集的眼睛图像
有两个主要资源可以获取数据。第一个是iChallenge-AMD网站 https://amd.grand-challenge.org/。您首先需要注册参加比赛,然后可以下载数据。第二种方式不需要注册,它是从 https://ai.baidu.com/broad/download 下载。在这里,您需要下载图像的“[训练]图像和AMD标签”和带有标签的Excel文件的“[训练]光盘和中央凹注释”。
下载并提取数据后,您应该有一个文件夹 Training400,其中包含子文件夹 AMD(包含 89 张图像)和非 AMD(包含 311 张图像)以及一个 Excel 文件Fovea_location.xlsx,其中包含每个图像中中央凹的中心位置。
三、探索数据
让我们首先使用 Pandas 加载 Excell 文件
从 pathlib 导入 路径
导入熊猫作为 pd
path_to_parent_dir = 路径('.')
path_to_labels_file = path_to_parent_dir / 'Training400' /'Fovea_location.xlsx'labels_df = pd.read_excel(path_to_labels_file, index_col='ID')print('Head')print(labels_df.head()) # 显示 excell 文件中
的前 5 行 print('\nTail'
)
print(labels_df.tail()) # 显示 excell 文件中的最后 5 行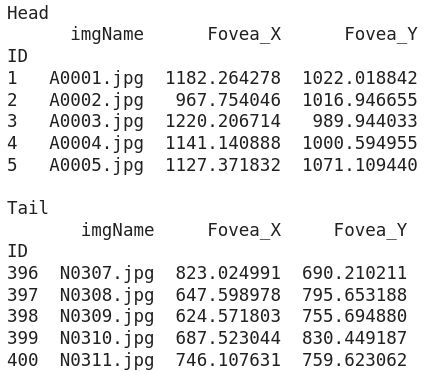
数据框的打印结果
我们看到该表由四列组成:
- ID — 我们将其用作数据框的索引
- imgName ― 图像的名称。我们注意到,带有 AMD 的图像以 A 开头,而没有 AMD 的图像以 N 开头。
- Fovea_X — 图像中中央凹质心的 x 坐标
- Fovea_Y — 图像中中央凹质心的 y 坐标
我们可以在图像中绘制中央凹的质心,以了解中央凹位置的分布。
%matplotlib inline # 如果使用 Jupyter notebook 或 Colab
import seaborn as sns
import matplotlib.pyplot as plt
plt.rcParams['figure.figsize'] = (10, 6)amd_or_non_amd = ['AMD' if name.startswith('A')
else 'Non-AMD' for name inlabels_df.imgName]
sns.scatterplot(x='Fovea_X', y='Fovea_Y', hue=amd_or_non_amd, data=labels_df, alpha=0.7)
我们可以看到中央凹位置的两个主要组,但更重要的是,对于某些图像,中央凹质心的标签是(0,0)。最好从数据框中移除这些图像。
labels_df = labels_df[(labels_df[['Fovea_X', 'Fovea_Y']] != 0)。all(axis=1)]
amd_or_non_amd = ['AMD' if name.startswith('A') else 'Non-AMD' for name in labels_df.imgName]现在我们想查看图像的随机样本并标记中央凹的中心。为此,让我们定义一个函数来加载带有标签的图像,另一个函数根据标签在中央凹周围绘制一个边界框。
从 PIL import Image, ImageDraw
def 导入 numpy 作为 np
load_image_with_label(labels_df, id):
image_name = labels_df.loc[id, 'imgName']
data_type = 'AMD' 如果 image_name.startswith('A') else 'Non-AMD'
image_path = path_to_ parent_dir / 'Training400' / data_type / image_name 图像 =
图像。open(image_path) label = (labels_df.loc[id, 'Fovea_X'], labels_df.loc[id, 'Fovea_Y'])
返回图像, label def show_image_with_bounding_box(图像, 标签, w_h_bbox=(50, 50), 厚度=2):
W, h =
w_h_bbox c_x , c_y = label
image = image.copy() ImageDraw.Draw(image).rectangle(((c_x-w//2, c_y-h//2), (c_x+w//2, c_y+h//2)), outline='green', width=thick) plt.imshow(image)We randomly sample six images and show them.
rng = np.random.default_rng(42) # 创建具有种子的生成器对象 42 n_rows = 2 # 图像子图中的行数 n_cols = 3 # # 图像子图中
的列数 索引 = rng.choice(labels_df.index,
n_rows *
n_cols)
对于 ii, 枚举中的 id (索引, 1):
image, label = load_image_with_label(labels_df, id) plt.subplot(n_rows, n_cols, ii) show_image_with_bounding_box(image, label, (250, 250), 20)
plt.title(labels_df.loc[id, 'imgName'])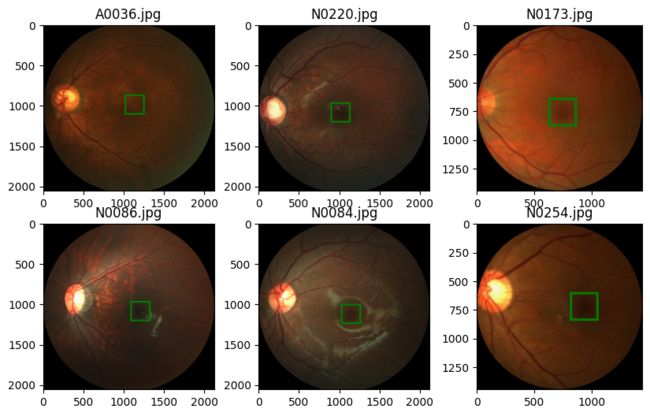
从上图中我们需要注意的第一件事是,对于不同的图像,图像的尺寸是不同的。我们现在想了解图像尺寸的分布。为此,我们在数据集中收集图像的高度和宽度。
heights = []widths = []for image_name, data_type in zip(labels_df['imgName']
, amd_or_non_amd):
image_path = path_to_parent_dir / 'Training400' / data_type / image_name
h, w = Image。open(image_path).size
heights.append(h) widths.append(w)sns.histplot(x=heights, hue=amd_or_non_amd)
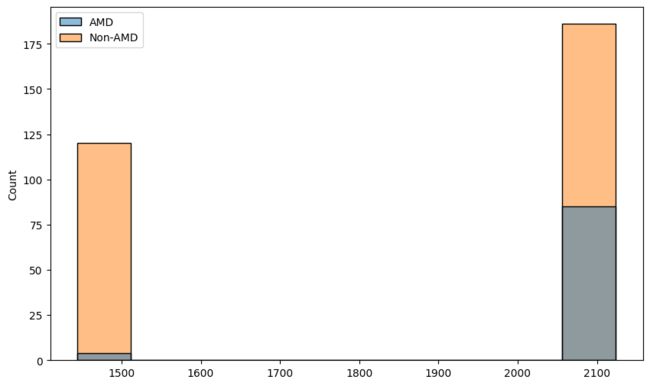
sns.histplot(x=widths, hue=amd_or_non_amd) 
四、数据增强和转换
数据增强是非常重要的一步,它让我们扩展数据集(特别是当我们有一个小数据集时,就像我们的情况一样)并使网络更加健壮。我们还想应用一些转换来使网络的输入保持一致(在我们的例子中,我们需要调整图像的大小,使它们具有恒定的维度)。
除了图像的增强和转换外,我们还需要照顾标签。例如,如果我们垂直翻转图像,中央凹的质心将获得我们需要更新的新坐标。为了更新标签和图像的转换,我们将自己编写一些转换类。
import torch
import torchvision.transforms.functional as tf
class Resize:
'''Resize the image and convert the label
to the new shape of the image'''
def __init__(self, new_size=(256, 256)):
self.new_width = new_size[0]
self.new_height = new_size[1]
def __call__(self, image_label_sample):
image = image_label_sample[0]
label = image_label_sample[1]
c_x, c_y = label
original_width, original_height = image.size
image_new = tf.resize(image, (self.new_width, self.new_height))
c_x_new = c_x * self.new_width /original_width
c_y_new = c_y * self.new_height / original_height
return image_new, (c_x_new, c_y_new)
class RandomHorizontalFlip:
'''Horizontal flip the image with probability p.
Adjust the label accordingly'''
def __init__(self, p=0.5):
if not 0 <= p <= 1:
raise ValueError(f'Variable p is a probability, should be float between 0 to 1')
self.p = p # float between 0 to 1 represents the probability of flipping
def __call__(self, image_label_sample):
image = image_label_sample[0]
label = image_label_sample[1]
w, h = image.size
c_x, c_y = label
if np.random.random() < self.p:
image = tf.hflip(image)
label = w - c_x, c_y
return image, label
class RandomVerticalFlip:
'''Vertically flip the image with probability p.
Adjust the label accordingly'''
def __init__(self, p=0.5):
if not 0 <= p <= 1:
raise ValueError(f'Variable p is a probability, should be float between 0 to 1')
self.p = p # float between 0 to 1 represents the probability of flipping
def __call__(self, image_label_sample):
image = image_label_sample[0]
label = image_label_sample[1]
w, h = image.size
c_x, c_y = label
if np.random.random() < self.p:
image = tf.vflip(image)
label = c_x, h - c_y
return image, label
class RandomTranslation:
'''Translate the image by randomaly amount inside a range of values.
Translate the label accordingly'''
def __init__(self, max_translation=(0.2, 0.2)):
if (not 0 <= max_translation[0] <= 1) or (not 0 <= max_translation[1] <= 1):
raise ValueError(f'Variable max_translation should be float between 0 to 1')
self.max_translation_x = max_translation[0]
self.max_translation_y = max_translation[1]
def __call__(self, image_label_sample):
image = image_label_sample[0]
label = image_label_sample[1]
w, h = image.size
c_x, c_y = label
x_translate = int(np.random.uniform(-self.max_translation_x, self.max_translation_x) * w)
y_translate = int(np.random.uniform(-self.max_translation_y, self.max_translation_y) * h)
image = tf.affine(image, translate=(x_translate, y_translate), angle=0, scale=1, shear=0)
label = c_x + x_translate, c_y + y_translate
return image, label
class ImageAdjustment:
'''Change the brightness and contrast of the image and apply Gamma correction.
No need to change the label.'''
def __init__(self, p=0.5, brightness_factor=0.8, contrast_factor=0.8, gamma_factor=0.4):
if not 0 <= p <= 1:
raise ValueError(f'Variable p is a probability, should be float between 0 to 1')
self.p = p
self.brightness_factor = brightness_factor
self.contrast_factor = contrast_factor
self.gamma_factor = gamma_factor
def __call__(self, image_label_sample):
image = image_label_sample[0]
label = image_label_sample[1]
if np.random.random() < self.p:
brightness_factor = 1 + np.random.uniform(-self.brightness_factor, self.brightness_factor)
image = tf.adjust_brightness(image, brightness_factor)
if np.random.random() < self.p:
contrast_factor = 1 + np.random.uniform(-self.brightness_factor, self.brightness_factor)
image = tf.adjust_contrast(image, contrast_factor)
if np.random.random() < self.p:
gamma_factor = 1 + np.random.uniform(-self.brightness_factor, self.brightness_factor)
image = tf.adjust_gamma(image, gamma_factor)
return image, label
class ToTensor:
'''Convert the image to a Pytorch tensor with
the channel as first dimenstion and values
between 0 to 1. Also convert the label to tensor
with values between 0 to 1'''
def __init__(self, scale_label=True):
self.scale_label = scale_label
def __call__(self, image_label_sample):
image = image_label_sample[0]
label = image_label_sample[1]
w, h = image.size
c_x, c_y = label
image = tf.to_tensor(image)
if self.scale_label:
label = c_x/w, c_y/h
label = torch.tensor(label, dtype=torch.float32)
return image, label
class ToPILImage:
'''Convert a tensor image to PIL Image.
Also convert the label to a tuple with
values with the image units'''
def __init__(self, unscale_label=True):
self.unscale_label = unscale_label
def __call__(self, image_label_sample):
image = image_label_sample[0]
label = image_label_sample[1].tolist()
image = tf.to_pil_image(image)
w, h = image.size
if self.unscale_label:
c_x, c_y = label
label = c_x*w, c_y*h
return image, label让我们尝试一下新的转换。我们为每个转换类创建对象,并使用 torchvision 将它们连接起来。然后,我们将完整转换应用于带有标签的图像。Compose
from torchvision.transforms import Compose
image, label = load_image_with_label(labels_df, 1)
transformation = Compose([Resize(), RandomHorizontalFlip(), RandomVerticalFlip(), RandomTranslation(), ImageAdjustment(), ToTensor()])
new_image, new_label = transformation((image, label))
print(f'new_im type {new_image.dtype}, shape = {new_image.shape}')
print(f'{new_label=}')
# new_im type torch.float32, shape = torch.Size([3, 256, 256]
# new_label=tensor([0.6231, 0.3447])我们如预期的那样得到了结果。我们还希望将新的张量转换为 PIL 图像,并将标签转换回图像坐标,以便我们可以使用我们的 show 方法显示它。
new_image, new_label = ToPILImage()((new_image, new_label))
show_image_with_bounding_box(new_image, new_label)
五、制作数据集和数据加载器
要将数据加载到我们的模型中,我们首先需要构建一个自定义数据集类(它是 PyTorch 数据集类的子类)。为此,我们需要实现三种方法:
__init__()- 构造和初始化数据集对象__getitem__()- 处理我们可以通过索引从整个数据集中获取图像和标签的方式__len__()- 返回我们拥有的数据集的长度
import torch
from torch.utils.data import Dataset, DataLoader
device = 'cuda' if torch.cuda.is_available() else 'cpu'
class AMDDataset(Dataset):
def __init__(self, data_path, labels_df, transformation):
self.data_path = Path(data_path)
self.labels_df = labels_df.reset_index(drop=True)
self.transformation = transformation
def __getitem__(self, index):
image_name = self.labels_df.loc[index, 'imgName']
image_path = self.data_path / ('AMD' if image_name.startswith('A') else 'Non-AMD') / image_name
image = Image.open(image_path)
label = self.labels_df.loc[index, ['Fovea_X','Fovea_Y']].values.astype(float)
image, label = self.transformation((image, label))
return image.to(device), label.to(device)
def __len__(self):
return len(self.labels_df)在实际创建数据集对象之前,我们需要将数据拆分为训练集和验证集。我们用于将其拆分为训练数据帧和验证数据帧。scikit-learnlabels_df
from sklearn.model_selection import train_test_split
labels_df_train, labels_df_val = train_test_split(labels_df, test_size=0.2, shuffle=True, random_state=42)
train_transformation = Compose([Resize(), RandomHorizontalFlip(), RandomVerticalFlip(), RandomTranslation(), ImageAdjustment(), ToTensor()])
val_transformation = Compose([Resize(), ToTensor()])
train_dataset = AMDDataset('Training400', labels_df_train, train_transformation)
val_dataset = AMDDataset('Training400', labels_df_val, val_transformation)我们可以通过显示图像样本来检查我们的数据集对象。
image, label = train_dataset[0]
show_image_with_bounding_box(*(ToPILImage()((image, label))))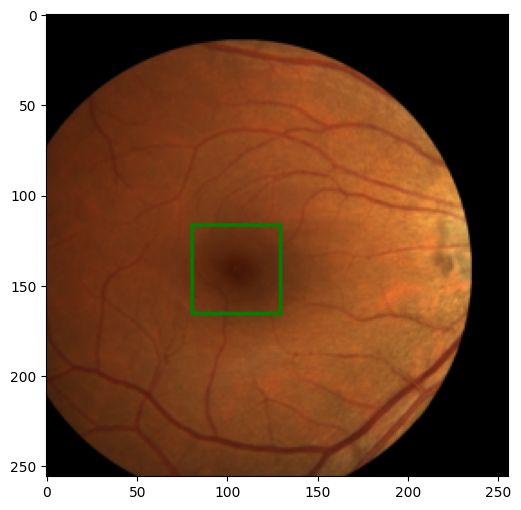
image, label = val_dataset[0]
show_image_with_bounding_box(*(ToPILImage()((image, label))))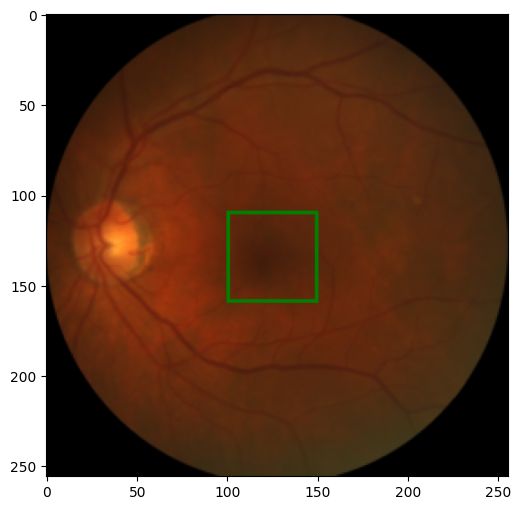
下一步是定义一个数据加载程序,一个用于训练数据集,一个用于验证数据集。
train_dataloader = DataLoader(train_dataset, batch_size=8)
val_dataloader = DataLoader(val_dataset, batch_size=16)我们不必在 DataLoader 中进行随机排序,因为当我们将数据拆分为训练数据集和验证数据集时,我们已经对数据进行了随机排序。现在让我们看一个批处理,看看结果是否符合预期。
image_batch, labels_batch = next(iter(train_dataloader))
print(image_batch.shape, image_batch.dtype)
print(labels_batch, labels_batch.dtype)
# torch.Size([8, 3, 256, 256]) torch.float32
# tensor([[0.4965, 0.3782],
# [0.6202, 0.6245],
# [0.5637, 0.4887],
# [0.5114, 0.4908],
# [0.3087, 0.4657],
# [0.5330, 0.5309],
# [0.6800, 0.6544],
# [0.5828, 0.4034]], device='cuda:0') torch.float32六、构建模型
我们希望构建一个模型,该模型获取调整大小的 RGB 图像,并为 x 和 y 坐标返回两个值。我们将以类似于使用跳过连接的 ResNet 的方式使用残差块。我们从定义基本的重新块开始
from torch.nn.modules.batchnorm import BatchNorm2d
import torch.nn as nn
class ResBlock(nn.Module):
def __init__(self, in_channels, out_channels):
super().__init__()
self.base1 = nn.Sequential(
nn.Conv2d(in_channels, in_channels, kernel_size=3, padding='same'),
nn.BatchNorm2d(in_channels),
nn.ReLU(True)
)
self.base2 = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=3, padding='same'),
nn.BatchNorm2d(out_channels),
nn.ReLU(True)
)
def forward(self, x):
x = self.base1(x) + x
x = self.base2(x)
return x此块有两个步骤。首先,它使用卷积层,然后进行批量归一化和 ReLU。然后我们将原始输入添加到结果中并应用第二步,该步骤再次由卷积层组成,然后是批量归一化和 ReLU,但这次我们更改了过滤器的数量。现在,我们已准备好构建模型。
class FoveaNet(nn.Module):
def __init__(self, in_channels, first_output_channels):
super().__init__()
self.model = nn.Sequential(
ResBlock(in_channels, first_output_channels),
nn.MaxPool2d(2),
ResBlock(first_output_channels, 2 * first_output_channels),
nn.MaxPool2d(2),
ResBlock(2 * first_output_channels, 4 * first_output_channels),
nn.MaxPool2d(2),
ResBlock(4 * first_output_channels, 8 * first_output_channels),
nn.MaxPool2d(2),
nn.Conv2d(8 * first_output_channels, 16 * first_output_channels, kernel_size=3),
nn.MaxPool2d(2),
nn.Flatten(),
nn.Linear(7 * 7 * 16 * first_output_channels, 2)
)
def forward(self, x):
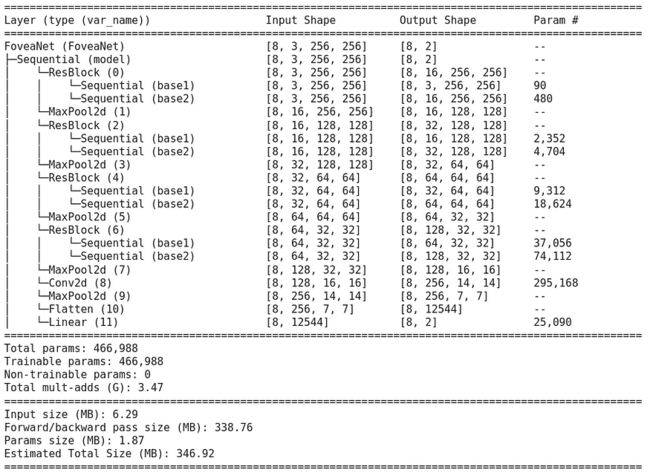
return self.model(x)我们可以使用包更好地查看我们的模型torchinfo
! pip install torchinfo -q # install torchinfofrom torchinfo import summary
net = FoveaNet(3, 16)
summary(model=net,
input_size=(8, 3, 256, 256), # (batch_size, color_channels, height, width)
col_names=["input_size", "output_size", "num_params"],
col_width=20,
row_settings=["var_names"]
)
七、损失和优化器
我们首先使用平滑 L1 损失定义损失函数。通常,当绝对差值小于 2 时,此损失的行为类似于 L1,否则与 L1 类似。
loss_func = nn.SmoothL1Loss()对于优化器,我们将使用 Adam。
optimizer = torch.optim.Adam(net.parameters(), lr=1e-4)作为性能指标,我们使用“交集于联合”指标 (IoU)。此指标计算两个边界框的交点与其并集之间的比率。
首先,我们需要定义一个函数,该函数获取质心作为输入,并返回形式为 [x0, y0, x1, y1] 的边界框作为输出
def centroid_to_bbox(centroids, w=50/256, h=50/256):
x0_y0 = centroids - torch.tensor([w/2, h/2]).to(device)
x1_y1 = centroids + torch.tensor([w/2, h/2]).to(device)
return torch.cat([x0_y0, x1_y1], dim=1)以及计算一批标签的 IoU 的函数
from torchvision.ops import box_iou
def iou_batch(output_labels, target_labels):
output_bbox = centroid_to_bbox(output_labels)
target_bbox = centroid_to_bbox(target_labels)
return torch.trace(box_iou(output_bbox, target_bbox)).item()接下来,我们为批处理定义一个损失函数
def batch_loss(loss_func, output, target, optimizer=None):
loss = loss_func(output, target)
with torch.no_grad():
iou_metric = iou_batch(output, target)
if optimizer is not None:
optimizer.zero_grad()
loss.backward()
optimizer.step()
return loss.item(), iou_metric八、训练模型
在此步骤中,我们将训练模型以找到中央凹。我们首先定义一个辅助函数来进行训练步骤,这意味着遍历数据加载器中的所有数据,使用我们之前的函数获取损失(并更新训练案例中的权重),并跟踪损失和 IoU 指标。batch_loss
def train_val_step(dataloader, model, loss_func, optimizer=None):
if optimizer is not None:
model.train()
else:
model.eval()
running_loss = 0
running_iou = 0
for image_batch, label_batch in dataloader:
output_labels = model(image_batch)
loss_value, iou_metric_value = batch_loss(loss_func, output_labels, label_batch, optimizer)
running_loss += loss_value
running_iou += iou_metric_value
return running_loss/len(dataloader.dataset), running_iou/len(dataloader.dataset)现在,我们有了进行培训所需的一切。我们定义了两个字典来跟踪损失和 IoU 指标,以便在每个 epoch 之后进行训练和验证。我们还保存了提供最佳结果的模型权重。
num_epoch = 100
loss_tracking = {'train': [], 'val': []}
iou_tracking = {'train': [], 'val': []}
best_loss = float('inf')
model = FoveaNet(3, 16).to(device)
loss_func = nn.SmoothL1Loss(reduction="sum")
optimizer = torch.optim.Adam(model.parameters(), lr=5e-5)
for epoch in range(num_epoch):
print(f'Epoch {epoch+1}/{num_epoch}')
training_loss, trainig_iou = train_val_step(train_dataloader, model, loss_func, optimizer)
loss_tracking['train'].append(training_loss)
iou_tracking['train'].append(trainig_iou)
with torch.inference_mode():
val_loss, val_iou = train_val_step(val_dataloader, model, loss_func, None)
loss_tracking['val'].append(val_loss)
iou_tracking['val'].append(val_iou)
if val_loss < best_loss:
print('Saving best model')
torch.save(model.state_dict(), 'best_model.pt')
best_loss = val_loss
print(f'Training loss: {training_loss:.6}, IoU: {trainig_iou:.2}')
print(f'Validation loss: {val_loss:.6}, IoU: {val_iou:.2}')让我们绘制每个纪元的平均损失和平均 IoU 作为纪元的函数。
plt.plot(range(1, num_epoch+1), loss_tracking['train'], label='train')
plt.plot(range(1, num_epoch+1), loss_tracking['val'], label='validation')
plt.xlabel('epoch')
plt.ylabel('loss')
plt.legend()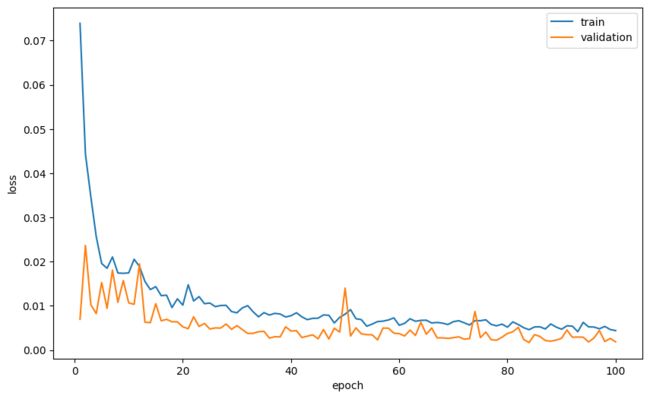
plt.plot(range(1, num_epoch+1), iou_tracking['train'], label='train')
plt.plot(range(1, num_epoch+1), iou_tracking['val'], label='validation')
plt.xlabel('epoch')
plt.ylabel('iou')
plt.legend()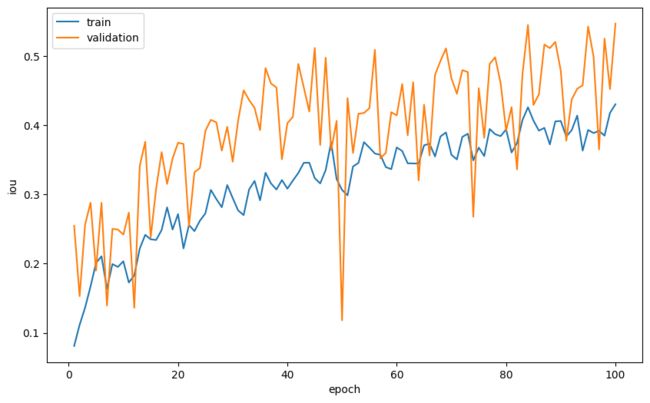
最后,我们想看一些图像,看看模型的预测在多大程度上接近中央凹的真实坐标。为此,我们基于之前的函数定义一个新函数,但这次我们为预测(绿色)和目标(红色)绘制边界框。show_image_with_bounding_box
def show_image_with_2_bounding_box(image, label, target_label, w_h_bbox=(50, 50), thickness=2):
w, h = w_h_bbox
c_x , c_y = label
c_x_target , c_y_target = target_label
image = image.copy()
ImageDraw.Draw(image).rectangle(((c_x-w//2, c_y-h//2), (c_x+w//2, c_y+h//2)), outline='green', width=thickness)
ImageDraw.Draw(image).rectangle(((c_x_target-w//2, c_y_target-h//2), (c_x_target+w//2, c_y_target+h//2)), outline='red', width=thickness)
plt.imshow(image)现在我们加载我们得到的最佳模型,并对图像样本进行预测并查看结果
model.load_state_dict(torch.load('best_model.pt'))
model.eval()
rng = np.random.default_rng(0) # create Generator object with seed 0
n_rows = 2 # number of rows in the image subplot
n_cols = 3 # # number of cols in the image subplot
indexes = rng.choice(range(len(val_dataset)), n_rows * n_cols, replace=False)
for ii, id in enumerate(indexes, 1):
image, label = val_dataset[id]
output = model(image.unsqueeze(0))
iou = iou_batch(output, label.unsqueeze(0))
_, label = ToPILImage()((image, label))
image, output = ToPILImage()((image, output.squeeze()))
plt.subplot(n_rows, n_cols, ii)
show_image_with_2_bounding_box(image, output, label)
plt.title(f'{iou:.2f}')
九、结论
在本教程中,我们介绍了为单个对象检测任务构建网络所需的所有主要步骤。我们首先探索数据,清理和排列数据,然后构建数据增强函数以及数据集和DataLoader对象,最后构建和训练模型。我们得到了相对不错的结果,欢迎您尝试通过更改模型的学习参数和架构来提高性能。