【Unity】基于A*算法的简单寻路代码实现
这是我用Unity实现的A*寻路算法,参考了许多大神的代码架构终于写出。现成列出来,供各位学习交流。
A*算法参考我的上一篇转载文章,非常通俗易懂
A*寻路算法
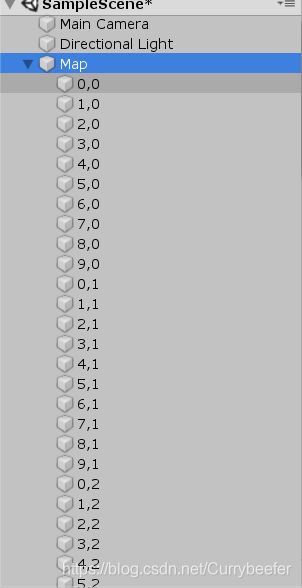
这是寻路的地图,地图由100个小方格组成,每个方格有对应的编号。
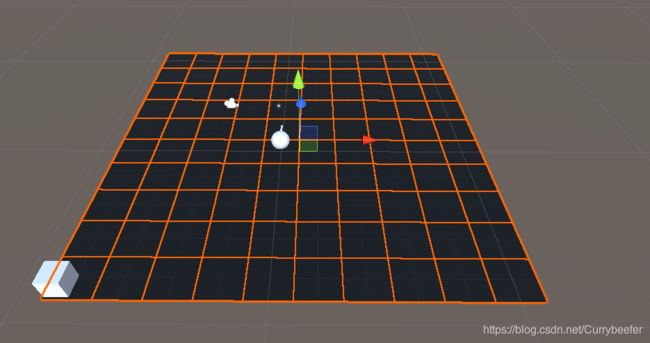
方格地图的编号
详细代码在此,代码都有十分详细的注释
A*节点的数据结构:
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
//A*节点的数据结构
public class AStarPoint
{
public AStarPoint parentPoint { get; set; }//父节点
public GameObject gameObject { get; set; }//节点的游戏物体
//F,G,H值
public float F { get; set; }
public float G { get; set; }
public float H { get; set; }
public Vector2 position { get; set; }//当前节点所处于的位置
public int posX { get; set; }
public int posY { get; set; }
public bool isObstacle { get; set; }//是否是障碍物
/// A*寻路算法本身
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class AStarAlgorithm
{
//地图的长宽的格子数量
const int XLength = 10;
const int YLength = 10;
//整张地图的节点集合
public AStarPoint[,] pointGrid = new AStarPoint[XLength,YLength];
//存放最终寻路结果的栈
public Stack<AStarPoint> pathPosStack = new Stack<AStarPoint>();
public static AStarAlgorithm Instance;
/// 方块移动方法:
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class Cube : MonoBehaviour
{
AStarAlgorithm myAlgorithm;
AStarPoint[,] pointGrid;
Stack<AStarPoint> pathPosStack;
AStarPoint startPos;//开始位置
AStarPoint endPos;//结束位置
GameObject player;//玩家
void Start()
{
myAlgorithm = AStarAlgorithm.GetInstance;//获取算法实例
pointGrid = myAlgorithm.pointGrid;//获取地图点集合
player = GameObject.FindGameObjectWithTag("Player");//获取玩家
//设置障碍物
myAlgorithm.SetObstacle(5, 3);
myAlgorithm.SetObstacle(6, 3);
myAlgorithm.SetObstacle(5, 4);
myAlgorithm.SetObstacle(6, 4);
myAlgorithm.SetObstacle(1, 7);
myAlgorithm.SetObstacle(2, 7);
myAlgorithm.SetObstacle(3, 7);
myAlgorithm.SetObstacle(4, 7);
//开始定位玩家和cube所在的位置进行移动
InvokeRepeating("Relocate", 0,1f);
}
static Coroutine C;
/// 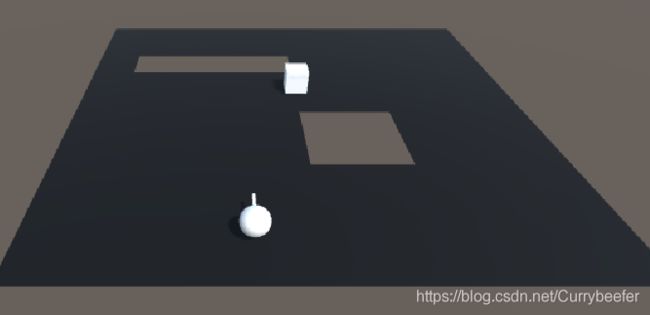
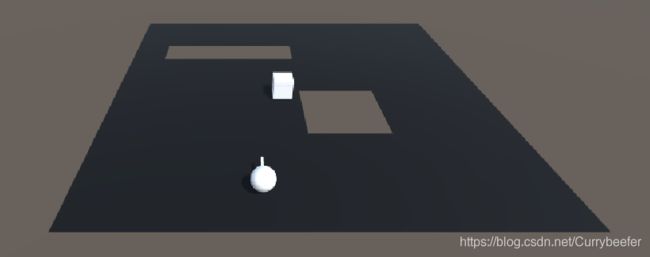

运行游戏,可以看见寻路算法十分有效,Cube可以完美避开障碍物,无论Player在哪里都能被找到