ARM体系结构学习笔记:寄存器
前段时间通篇概览一遍汇编语言程序设计——基于ARM体系结构(第4版), 总感觉纸上得来终觉浅, 并不能够让我产生一种读汇编就跟读C代码一样那种流畅的感觉. 如果我们越熟悉, 越发觉得他们是有规律可循的, 这里做一下对应的记录, 互相共勉.
通用寄存器并不通用
表面上arm为我们提供了31个通用寄存器, 但其实他们并不通用, 或者说编译在编译代码时, 并不是随意的给寄存器赋值的, 他们都被划分为了不同的用途和含义, 我们需要记住这些用途,看汇编看起来就不会无从着手了.
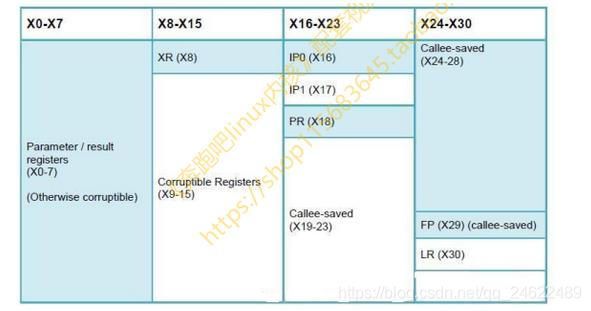
ARM64提供了31个通用寄存器,其用途如下表:
x0~x7:传递子程序的参数和返回值,使用时不需要保存,多余的参数用堆栈传递,64位的返回结果保存在x0中。
x8:用于保存子程序的返回地址,使用时不需要保存。
x9~x15:临时寄存器,也叫可变寄存器,子程序使用时不需要保存。
x16~x17:子程序内部调用寄存器(IPx),使用时不需要保存,尽量不要使用。
x18:平台寄存器,它的使用与平台相关,尽量不要使用。
x19~x28:临时寄存器,子程序使用时必须保存。
x29:帧指针寄存器(FP),用于连接栈帧,使用时必须保存。
x30:链接寄存器(LR),用于保存子程序的返回地址。
x31:堆栈指针寄存器(SP),用于指向每个函数的栈顶。
比较重要的寄存器 FP, LR, SP, PC, PSR
-
通过PC寄存器状态信息可以了解到目前PC寄存器在等待SVC调用, 处于read函数+4的偏移位置
-
通过LR寄存器了解到上一层调用来自__sread, 调用链为__sread()->read()
-
PSR寄存器有好几种模式, 目前显示的是用户模式下面的CPSR寄存器的状态信息, 不同的位,具有不同的含义, 图片内已经做了详细的注释信息
次重要寄存器
hello:00000056C73836C4 SUB SP, SP, #0x10 ; CODE XREF: main:loc_56C7383710↓p
hello:00000056C73836C8 MOV W8, #1 ; w8 = 1 ;
hello:00000056C73836CC MOV W9, #2 ; w9 = 2 ;
hello:00000056C73836D0 STR W8, [SP,#0x10+var_4] ; var_4 = w8 = 1 ;临时变量初始化为1
hello:00000056C73836D4 STR W9, [SP,#0x10+var_8] ; var_8 = w9 = 2 ;临时变量初始化2
hello:00000056C73836D8 STR WZR, [SP,#0x10+var_C] ; var_c = 0 ;临时变量初始化0 使用wzr寄存器
hello:00000056C73836DC LDR W8, [SP,#0x10+var_4] ; w8 = var_4 = 1 ;临时变量到寄存器w8
hello:00000056C73836E0 LDR W9, [SP,#0x10+var_8] ; w9 = var_8 = 2 ;临时变量到寄存器w9
hello:00000056C73836E4 ADD W8, W8, W9 ; w8 = w8 + w9 = 3;执行加法
hello:00000056C73836E8 STR W8, [SP,#0x10+var_C] ; var_c = w8 = 3 ;存储结果
hello:00000056C73836EC LDR W0, [SP,#0x10+var_C] ; w0 = var_c = 3 ;返回结果 因为返回值是int, 因此使用w. w0便存储了对应的返回值
hello:00000056C73836F0 ADD SP, SP, #0x10 ; ;pop stack ;回收临时变量
hello:00000056C73836F4 RET
-
X0寄存器: 保存返回值
-
X8, X9寄存器: tmp
-
WZR/XZR寄存器: zero寄存器, 一般用来进行零时变量初始化
PC寄存器
因为PC寄存器比较重要, 因此单独列出来
https://github.com/yhnu/note/tree/master/arm/02register_pc.md
指令的设计
- 没有隐式内存操作指令
所有的内存操作都有对应的指令(LDR/STR)
- 不同的指令都有对应的操作数{内存/立即数/寄存器}(对应数量1-3个)
(1) 内存操作数和立即数操作数不能同时存在
(2) 内存操作数至多出现一次
(3) 寄存器操作数总在最前面
常用的指令
- SUB
将某一寄存器的值和另一寄存器的值 相减 并将结果保存在另一寄存器中
SUB x0, x1, x2 ; x0 = x1 - x2
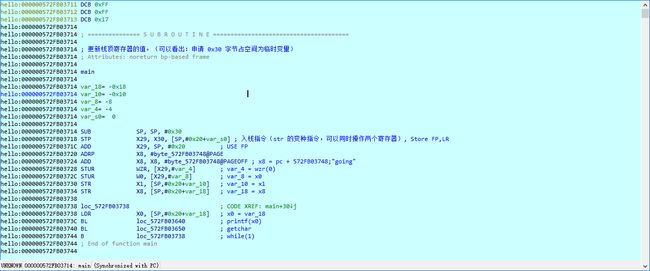
SUB SP, SP, #0x30; 更新栈顶寄存器的值,(可以看出:申请 0x30 字节占空间为临时变量)
- STP(stp:store pair)
入栈指令(str 的变种指令,可以同时操作两个寄存器), var_xxx(xxx代表偏移,一般为负数)
STP X29, X30, [SP,#0x20+var_s0] ; 入栈指令(str 的变种指令,可以同时操作两个寄存器), 保存X29, X30, X29为FP寄存器, X30为LR寄存器
- ADD
将某一寄存器的值和另一寄存器的值 相加 并将结果保存在另一寄存器中
add x0, x0, #1 ; x0 = x0 + 1
add x0, x1, x2 ; x0 = x1 + x2
add x0, x1, [x2] ; x0 = x1 + mem(x2)
ADD X29, SP, #0x20; X29 = SP + 0x20, 前面已经保存了寄存器,这里开始使用寄存器
-
ADR
这是一条小范围的地址读取指令,它将基于PC的相对偏移的地址读到目标寄存器中;
使用格式:ADR register exper -
ADRP
用来定位数据段中的数据用, 因为 aslr 会导致代码及数据的地址随机化, 用 adrp 来根据 pc 做辅助定位
ADRP X8, #aGoing@PAGE ; "going ...... \n"
ADD X8, X8, #aGoing@PAGEOFF ; "going ...... \n"
- 得到一个大小为4KB的页的基址,而且在该页中有全局变量aGoing的地址;ADRP就是讲该页的基址存到寄存器X8中;
- ADD指令会算出g的地址,X8+#aGoing@PAGEOFF,#aGoing@PAGEOFF是一个偏移量;这样就得到了g的地址X8;
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-k4OGxdX9-1692235287484)(https://cdn.jsdelivr.net/gh/yhnu/PicBed/20211122213837.png)]
对应原理:
- 编译时,首先会计算出当前PC到exper的偏移量#offset_to_exper
- pc的低12位清零,然后加上偏移量,给register, 得到的地址,是含有label的4KB对齐内存区域的base地址;
- STUR/STR
ST开头的为存数据,比如说STR、STP、STUR
U: 表示负数
P: PAIR
STUR WZR, [X29,#var_4] ; var_4 = 0
STUR W0, [X29,#var_8] ; var_8 = w0; w0 is argc
STR X1, [SP,#0x20+var_10] ; var_10 = x1; x1 is argv
STR X8, [SP,#0x20+var_18] ; var_18 = x8;
- LDR
LDR X0, [SP,#0x20+var_18] ; x0 = var_18 = x8 = "going" is printf arg0
- BL/B/BR
BL: Branch with Link (−16MB to +16MB)
B : Branch (−2KB to +2KB)
BR: Branch to register (Any value in register)
B指令ARM官方文档
BL unk_639712B640 ; jump to printf with save lr
BL unk_639712B650 ; jump to getchar with save lr
B loc_639712B738 ; while(1)
BR X17 ; printf
hello 添加对应注释
PLT 调用特征
loc_639712B640 ; CODE XREF: main+28↓p
ADRP X16, #off_639713BFB0@PAGE ; X16 = PAGE(0x110000)
LDR X17, [X16,#off_639713BFB0@PAGEOFF] ; X17 = mem(X16 + offset) ; offset=00112000
ADD X16, X16, #off_639713BFB0@PAGEOFF ; X16 = X16 + offset
BR X17 ; printf
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-62nOvZyQ-1692235287485)(https://cdn.jsdelivr.net/gh/yhnu/PicBed/20211122193628.png)]
通过printf的plt调用过程,他们使用的策略都是一样的:
- 使用x16, x17寄存器
- 首先使用ADRP找到页基址, 然后加载对应页偏移, BR进行寄存器跳转