OsgEarth中设置模型运动路径,并绘制雷达扫描、动态实时绘制运动轨迹、跟随彩带
工程结构
-
- 需求
- 加载机场和飞机
- 创建飞机历史航迹
- 设置飞机视角跟随 并设置飞行路径
- 创建飞机飞行彩带
- 计算飞机飞行姿态
- TrailerCallback.h
- TrailerCallback.cpp
- CreateTrackCallbcak.h
- CreateTrackCallbcak.cpp
- BuildRader.h
- BuildRader.cpp
- BuildRaderCallback.cpp
- BuildRaderCallback.h

- #BuildRader/BuildRaderCallback 主要用来处理雷达相关操作
- #CreateTrackCallback 主要是用来实时绘制飞机历史轨迹
- #TrailerCallback 主要是飞机飞行彩带
- #ViewerWidget 主要是窗体相关,并初始化
需求
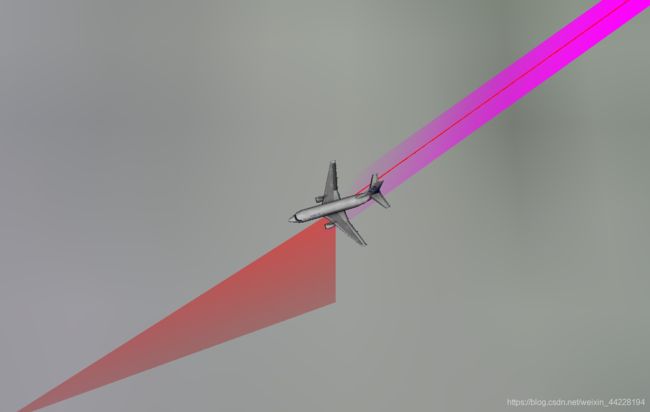
首先我们在场景中加载一个机场模型、一个飞机模型,将飞机沿着跑道方向放置于机场之中,根据我们设置的关键点的位置信息飞机,飞行过程中有雷达扫描飞机下方,飞机尾带跟随飞机运动,并实时绘制飞机的历史航迹。
加载机场和飞机
void CViewerWidget::addAirport()
{
m_rpCoordSystem = new osg::CoordinateSystemNode; //创建坐标系节点
m_rpCoordSystem->setEllipsoidModel(new osg::EllipsoidModel()); //设置设置椭圆体模型
//加载机场
m_rpnodeAirport = osgDB::readNodeFile("D:/Code/src/model/airport.ive");
m_rpmtAirport = new osg::MatrixTransform;
m_rpmtAirport->addChild(m_rpnodeAirport);
m_rpRoot->addChild(m_rpmtAirport);
//设置机场矩阵
osg::Matrixd mtTemp;
m_rpCoordSystem->getEllipsoidModel()->computeLocalToWorldTransformFromLatLongHeight(osg::DegreesToRadians(34.3762), osg::DegreesToRadians(109.1263),460 , mtTemp);
m_rpmtAirport->setMatrix(mtTemp); //根据经、维、高得到飞机场想要的矩阵
//加载飞机
m_rpnodeAirFly = osgDB::readNodeFile("D:/Code/src/model/B737.ive");
m_rpmtFlyself = new osg::MatrixTransform;
m_rpmtFlyself->setMatrix(osg::Matrixd::scale(10, 10, 10)*osg::Matrixd::rotate(3*osg::PI_4,osg::Vec3(0, 0, 1)));
m_rpmtFlyself->getOrCreateStateSet()->setMode(GL_RESCALE_NORMAL, osg::StateAttribute::ON); //设置属性,光照法线
m_rpmtFlyself->addChild(m_rpnodeAirFly);
m_rpmtFlyself->addChild(m_pBuildRader->BuildRader(500,300).get());
m_rpmtFly = new osg::MatrixTransform;
m_rpmtFly->addChild(m_rpmtFlyself);
m_rpRoot->addChild(m_rpmtFly);
//设置飞机矩阵
m_rpCoordSystem->getEllipsoidModel()->computeLocalToWorldTransformFromLatLongHeight(osg::DegreesToRadians(34.3834), osg::DegreesToRadians(109.1347), 537, mtTemp);
m_rpmtFly->setMatrix(mtTemp);
}
创建飞机历史航迹
void CViewerWidget::BuildHistoryRoute(osg::MatrixTransform* scaler ,float lineWidth)
{
osg::ref_ptr<osg::Group> rpgroup = new osg::Group;
scaler->addUpdateCallback(new CreateTrackCallback(rpgroup,scaler,lineWidth));
m_rpRoot->addChild(rpgroup);
}
设置飞机视角跟随 并设置飞行路径
void CViewerWidget::DoAPreLine()
{
osg::ref_ptr<osg::Vec4Array> rpvaTemp = new osg::Vec4Array;
rpvaTemp->push_back(osg::Vec4(109.1347, 34.3834, 537, 50));
rpvaTemp->push_back(osg::Vec4(109.1174, 34.3686, 567, 500));
rpvaTemp->push_back(osg::Vec4(109.1173, 34.3685, 566, 800));
rpvaTemp->push_back(osg::Vec4(108.8794, 34.1944, 3000, 800));
rpvaTemp->push_back(osg::Vec4(107.1302, 34.3941, 5000, 500));
rpvaTemp->push_back(osg::Vec4(108.9387, 34.9202, 8000, 200));
rpvaTemp->push_back(osg::Vec4(109.5066, 34.51, 3000, 200));
rpvaTemp->push_back(osg::Vec4(109.1347, 34.3834, 537, 200));
m_rpAnimationPath = CreateAirPath(rpvaTemp);
}
void CViewerWidget::DoPreLine()
{
m_rpmtFly->setUpdateCallback(new osg::AnimationPathCallback(m_rpAnimationPath, 0.0, 1.0));
//设置视角跟踪
m_rpEarthManipulator->setViewpoint(osgEarth::Viewpoint(109.1347, 34.3834,0,24.261,-21.6,1000),5);
m_rpEarthManipulator->setTetherNode(m_rpnodeAirFly);
}
创建飞机飞行彩带
void CViewerWidget::BuildRibbon( int size, osg::MatrixTransform* scaler ,int ribbonWidth)
{
osg::ref_ptr<osg::Geometry> rpgeom = new osg::Geometry;
//设置顶点
osg::ref_ptr<osg::Vec3Array> rpvec3Vertex = new osg::Vec3Array(size);
//设置颜色
osg::ref_ptr<osg::Vec4Array> rpvec4Color = new osg::Vec4Array(size);
for(unsigned int i = 0;i <size-1;i+=2)
{
(*rpvec3Vertex)[i] = osg::Vec3(0,0,0);
(*rpvec3Vertex)[i+1] = osg::Vec3(0,0,0);
float falpha = sinf(osg::PI * (float)i / (float)size);
(*rpvec4Color)[i] = osg::Vec4(m_vec3RibbonColor,falpha);
(*rpvec4Color)[i+1] = osg::Vec4(m_vec3RibbonColor,falpha);
}
//场景数据动态改变
rpgeom->setDataVariance(osg::Object::DYNAMIC);
//禁用显示列表,动态更新不安全
rpgeom->setUseDisplayList(false);
//使用VBO模式
rpgeom->setUseVertexBufferObjects(true);
rpgeom->setVertexArray(rpvec3Vertex);
rpgeom->setColorArray(rpvec4Color);
rpgeom->setColorBinding(osg::Geometry::BIND_PER_VERTEX);
rpgeom->addPrimitiveSet(new osg::DrawArrays(GL_QUAD_STRIP,0,size));
osg::ref_ptr<osg::Geode> rpgeode = new osg::Geode;
rpgeode->addDrawable(rpgeom);
//灯光、透明度
rpgeom->getOrCreateStateSet()->setMode(GL_LIGHTING,osg::StateAttribute::OFF);
rpgeom->getOrCreateStateSet()->setMode(GL_BLEND,osg::StateAttribute::ON);
rpgeom->getOrCreateStateSet()->setRenderingHint(osg::StateSet::TRANSPARENT_BIN);
scaler->addUpdateCallback(new CTrailerCallback(rpgeom,size,ribbonWidth));
m_rpRoot->addChild(rpgeode);
}
计算飞机飞行姿态
//根据输入的控制点,输出一个路径,格式为(经、纬、高、速)
osg::AnimationPath* CViewerWidget::CreateAirPath( osg::Vec4Array* ctrl )
{
osg::ref_ptr<osg::AnimationPath> rpAnimationPath = new osg::AnimationPath;
rpAnimationPath->setLoopMode(osg::AnimationPath::NO_LOOPING);
double dshuiPingAngle= 0.0; //水平方向需要转的角度
double dchuiZhiAngle = 0.0; //垂直方向需要转的角度
double time = 0;
osg::Matrix matrix;
//当前点
osg::Vec3d Vec3positionCur;
//下一点
osg::Vec3d Vec3positionNext;
for(osg::Vec4Array::iterator iter = ctrl->begin(); iter != ctrl->end(); iter++)
{
//下一个点
osg::Vec4Array::iterator iter2 = iter;
iter2 ++;
//如果只有两个点
if(iter2 == ctrl->end())
{
break;
}
//将经纬度转换到世界坐标系里面 为了计算竖直方向的坐标
double x, y, z;
m_rpCoordSystem->getEllipsoidModel()->convertLatLongHeightToXYZ(osg::DegreesToRadians(iter->y()), osg::DegreesToRadians(iter->x()), iter->z(), x, y, z);
Vec3positionCur = osg::Vec3(x, y, z);
m_rpCoordSystem->getEllipsoidModel()->convertLatLongHeightToXYZ(osg::DegreesToRadians(iter2->y()), osg::DegreesToRadians(iter2->x()), iter2->z(), x, y, z);
Vec3positionNext = osg::Vec3(x, y, z);
//求出水平夹角 经度相同
if(iter->x() == iter2->x())
{
dshuiPingAngle = osg::PI_2;
}
else
{
dshuiPingAngle = atan((iter2->y() - iter->y())/(iter2->x() - iter->x()));
if(iter2->x() > iter->x())
{
dshuiPingAngle += osg::PI;
}
}
//求垂直夹角 高度一致
if(iter->z() == iter2->z())
{
dchuiZhiAngle = 0;
}
else
{
//经纬度一致,高度不一致
if(0 == sqrt(pow(dGetDis(Vec3positionCur, Vec3positionNext), 2)) - pow((iter2->z() - iter->z()), 2))
{
dchuiZhiAngle = osg::PI_2;
}
else
{
//求出高度差
dchuiZhiAngle = atan((iter2->z() - iter->z()) / sqrt(pow(dGetDis(Vec3positionCur, Vec3positionNext), 2)) - pow((iter2->z() - iter->z()), 2) );
}
if(dchuiZhiAngle>=osg::PI_2)
{
dchuiZhiAngle = osg::PI_2;
}
if(dchuiZhiAngle <= -osg::PI_2)
{
dchuiZhiAngle = -osg::PI_2;
}
}
//求飞机的变换矩阵
m_rpCoordSystem->getEllipsoidModel()->computeLocalToWorldTransformFromLatLongHeight(osg::DegreesToRadians(iter->y()), osg::DegreesToRadians(iter->x()), iter->z(), matrix);
m_quatRotation.makeRotate(0, osg::Vec3(1.0, 0.0, 0.0), dchuiZhiAngle+osg::PI_2, osg::Vec3(0.0, 1.0, 0.0), dshuiPingAngle-osg::PI_4, osg::Vec3(0.0, 0.0, 1.0));
matrix.preMultRotate(m_quatRotation);
rpAnimationPath->insert(time, osg::AnimationPath::ControlPoint(Vec3positionCur, matrix.getRotate()));
//把下一个点的时间求出来
time += dGetRunTime(Vec3positionCur, Vec3positionNext, iter2->w());
}
//只有两个点时
rpAnimationPath->insert(time, osg::AnimationPath::ControlPoint(Vec3positionNext, matrix.getRotate()));
return rpAnimationPath.release();
}
double CViewerWidget::dGetRunTime( osg::Vec3d from,osg::Vec3d to,double speed )
{
if(speed == 0)
{
return 1000000000;
}
else
{
return dGetDis(from,to)/speed;
}
}
double CViewerWidget::dGetDis( osg::Vec3d from,osg::Vec3d to )
{
return std::sqrt( (to.x() - from.x())*(to.x() - from.x()) + (to.y() - from.y())*(to.y() - from.y()) + (to.z() - from.z())*(to.z() - from.z()));
}
其中飞机飞行姿态的计算,如何从当前点到下一个点,这里输入的位置信息osg::Vec4Array* ctrl是经度、维度、高度、速度,在这里我们需要计算飞机机头左右的转向角和飞机机头向上、向下的俯仰角,为了方便理解,我画了一个草图

- 其中,飞机在A点 ,下一个关键点在B点,首先,我们要明白飞机怎样才能飞到B点,首先,飞机机头要进行水平转向一定的角度和AC同向,然后向上垂直转向,和AB同向,这样,才可以按照航迹正确的飞到B点。
- 首先我们计算飞机的水平转向的角度,角度1的tan值等于A B两点的维度差的值/经度差的值,其中要进行考虑,经度相同时,成90度直角。
- 然后计算飞机的垂直转向角度,首先考虑,经纬度不一致,高度一致,然后考虑经纬度一致,高度不一致,也就是第二个点在第一个点正上方的特殊情况。角度2的tan值就等于A B 两点的高度差/距离。
TrailerCallback.h
#pragma once
#include TrailerCallback.cpp
#include "TrailerCallback.h"
CTrailerCallback::CTrailerCallback( osg::Geometry* ribbon, int size,int ribbonWidth )
{
m_opGeometryRibbon = ribbon;
m_nsize = size;
m_nwidth = ribbonWidth;
}
void CTrailerCallback::operator()( osg::Node* node, osg::NodeVisitor* nv )
{
osg::MatrixTransform* pmtTrans = dynamic_cast<osg::MatrixTransform*> (node);
if(pmtTrans && m_opGeometryRibbon.valid())
{
osg::Matrix mtx = pmtTrans->getMatrix();
osg::Vec3Array* pvec3Vertex = dynamic_cast<osg::Vec3Array*>(m_opGeometryRibbon->getVertexArray());
for(unsigned int i = 0;i<m_nsize-3;i+=2)
{
(*pvec3Vertex)[i] = (*pvec3Vertex)[i+2];
(*pvec3Vertex)[i+1] = (*pvec3Vertex)[i+3];
}
(*pvec3Vertex)[m_nsize-2] = osg::Vec3(0.0f,-m_nwidth,0.0f)* mtx;
(*pvec3Vertex)[m_nsize-1] = osg::Vec3(0.0f,m_nwidth,0.0f)* mtx;
pvec3Vertex->dirty();
m_opGeometryRibbon->dirtyBound();
}
traverse(node,nv);
}
CTrailerCallback::~CTrailerCallback()
{
}
CreateTrackCallbcak.h
#pragma once
#include CreateTrackCallbcak.cpp
#include "CreateTrackCallbcak.h"
CreateTrackCallback::CreateTrackCallback(osg::Group* root,osg::MatrixTransform* scaler,float lineWidth)
{
m_proot = root;
m_nwidth = lineWidth;
m_rpmtFly = scaler;
}
CreateTrackCallback::~CreateTrackCallback( )
{
}
void CreateTrackCallback::operator()( osg::Node* node,osg::NodeVisitor* nv )
{
osg::MatrixTransform* pmtTrans = dynamic_cast<osg::MatrixTransform*> (node);
if(pmtTrans)
{
osg::Matrix mtx = pmtTrans->getMatrix();
m_Vec3CurPosition = mtx.getTrans();
m_proot->addChild(BuildTrack(m_Vec3LastPosition,m_Vec3CurPosition));
}
traverse(node,nv);
m_Vec3LastPosition = m_Vec3CurPosition;
}
osg::ref_ptr<osg::Geode> CreateTrackCallback::BuildTrack(osg::Vec3 m_Vec3LatPoint,osg::Vec3 m_Vec3CurPoint)
{
osg::ref_ptr<osg::Geode> rpGeode = new osg::Geode;
osg::ref_ptr<osg::Geometry> rpGeom = new osg::Geometry;
osg::ref_ptr<osg::TessellationHints> rpHints = new osg::TessellationHints;
rpHints->setDetailRatio(0.5f);
//顶点数组
osg::ref_ptr<osg::Vec3Array> rpVec3Array = new osg::Vec3Array;
osg::ref_ptr<osg::Vec4Array> rpVec4Array = new osg::Vec4Array;
rpVec3Array->push_back(m_Vec3LatPoint);
rpVec3Array->push_back(m_Vec3CurPoint);
rpGeom->setVertexArray(rpVec3Array); //设置顶点
rpGeom->addPrimitiveSet(new osg::DrawArrays(osg::PrimitiveSet::LINES,0,rpVec3Array->size())); //设置关联方式 线段
rpVec4Array->push_back(osg::Vec4f(1,0,0,1.0));
rpGeom->setColorArray(rpVec4Array); //设置顶点颜色
rpGeom->setColorBinding(osg::Geometry::BIND_OVERALL); //设置关联方式
rpGeom->setDataVariance(osg::Object::DYNAMIC);
rpGeom->setUseVertexBufferObjects(true);
//设置线宽
osg::ref_ptr<osg::LineWidth> lw = new osg::LineWidth(m_nwidth);
rpGeom->getOrCreateStateSet()->setAttribute(lw, osg::StateAttribute::ON);
rpGeode->getOrCreateStateSet()->setMode(GL_LIGHTING,osg::StateAttribute::OFF);
rpGeom->getOrCreateStateSet()->setMode(GL_BLEND,osg::StateAttribute::ON); //混合色
rpGeom->getOrCreateStateSet()->setRenderingHint(osg::StateSet::TRANSPARENT_BIN); //透明度
rpGeode->addDrawable(rpGeom.get());
return rpGeode;
}
BuildRader.h
#pragma once
#include "BuildRaderCallback.h"
class CBuildRader
{
public:
CBuildRader()
{
}
~CBuildRader()
{
}
public:
//创建雷达圆锥图形
osg::ref_ptr<osg::Geode> BuildRader(float fRadius, float fHeight);
float m_fHeight;
float m_fRadius;
CBuildRaderCallback * buildRaderCallback;
};
BuildRader.cpp
#include "BuildRader.h"
osg::ref_ptr<osg::Geode> CBuildRader::BuildRader( float fRadius, float fHeight )
{
buildRaderCallback = new CBuildRaderCallback(2,fRadius,fHeight);
osg::ref_ptr<osg::Geode> rpGeode = new osg::Geode;
osg::ref_ptr<osg::Geometry> rpGeom = new osg::Geometry;
osg::ref_ptr<osg::TessellationHints> rpHints = new osg::TessellationHints;
rpHints->setDetailRatio(0.5f);
//顶点数组
osg::ref_ptr<osg::Vec3Array> rpVec3Array = new osg::Vec3Array;
osg::ref_ptr<osg::Vec4Array> rpVec4Array = new osg::Vec4Array;
rpVec3Array->push_back(osg::Vec3f(0,0,0));
rpVec3Array->push_back(osg::Vec3f(0,0,-fHeight));
rpVec3Array->push_back(osg::Vec3f(fRadius,0,-fHeight));
rpGeom->setVertexArray(rpVec3Array); //设置顶点
rpGeom->addPrimitiveSet(new osg::DrawArrays(osg::PrimitiveSet::TRIANGLES,0,rpVec3Array->size())); //设置关联方式 三角形
rpVec4Array->push_back(osg::Vec4f(1,0,0,0.5));
rpGeom->setColorArray(rpVec4Array); //设置顶点颜色
rpGeom->setColorBinding(osg::Geometry::BIND_PER_VERTEX); //设置关联方式
rpGeom->setDataVariance(osg::Object::DYNAMIC);
rpGeom->setUseVertexBufferObjects(true);
rpGeom->getOrCreateStateSet()->setMode(GL_LIGHTING,osg::StateAttribute::OFF);
//混合色
rpGeom->getOrCreateStateSet()->setMode(GL_BLEND,osg::StateAttribute::ON);
//透明度
rpGeom->getOrCreateStateSet()->setRenderingHint(osg::StateSet::TRANSPARENT_BIN);
rpGeode->addDrawable(rpGeom.get());
//扫描更新回调函数
rpGeode->addUpdateCallback(buildRaderCallback);
return rpGeode;
}
BuildRaderCallback.cpp
#include "BuildRaderCallback.h"
CBuildRaderCallback::CBuildRaderCallback( float fRotateSpeed,float fRotateRadius,float fRotateHeight )
{
m_fSpeed = fRotateSpeed;
m_fRadius = fRotateRadius;
m_fHeight = fRotateHeight;
}
CBuildRaderCallback::~CBuildRaderCallback()
{
}
void CBuildRaderCallback::operator()( osg::Node* node,osg::NodeVisitor* nv )
{
osg::Geode * pGeode = dynamic_cast<osg::Geode *>(node);
osg::ref_ptr<osg::Geometry> rpGeo = dynamic_cast<osg::Geometry*> (pGeode->getDrawable(0));
//获取顶点数组,设置连接方式
osg::ref_ptr<osg::Vec3Array> rpVertexArray = dynamic_cast<osg::Vec3Array*>(rpGeo->getVertexArray());
double dRotateTime = nv->getFrameStamp()->getReferenceTime(); //获取当前运行时间
rpVertexArray->push_back(rpVertexArray->at(0));
rpVertexArray->push_back(rpVertexArray->at(1));
rpVertexArray->push_back(osg::Vec3(m_fRadius * cosf(dRotateTime * m_fSpeed),m_fRadius * sinf(dRotateTime * m_fSpeed),-m_fHeight));
rpVertexArray->erase(rpVertexArray->begin());
rpVertexArray->erase(rpVertexArray->begin());
rpVertexArray->erase(rpVertexArray->begin());
rpVertexArray->dirty();
//更新轨迹
traverse(node,nv);
}
BuildRaderCallback.h
#pragma once
#include