- 【论文投稿】探秘计算机视觉算法:开启智能视觉新时代
小周不想卷
艾思科蓝学术会议投稿计算机视觉
目录引言一、计算机视觉算法基石:图像基础与预处理二、特征提取:视觉信息的精华萃取三、目标检测:从图像中精准定位目标四、图像分类:识别图像所属类别五、语义分割:理解图像的像素级语义六、计算机视觉算法前沿趋势与挑战引言在当今数字化浪潮中,计算机视觉宛如一颗璀璨的明珠,正深刻地改变着我们与世界的交互方式。从安防监控中的精准识别,到自动驾驶汽车的智能导航;从医疗影像的辅助诊断,到工业生产中的缺陷检测,计算
- ORB-SLAM2:四、 地图点、关键帧、图结构】
KeyPan
ORB-SLAM2计算机视觉人工智能机器学习深度学习算法
地图点、关键帧和图结构是ORB-SLAM系统的核心组成部分,它们共同构建了SLAM系统的空间表示与数据组织方式。本章将详细讨论这些模块及其在系统中的作用和实现方式。4.1地图点4.1.1什么是地图点地图点(MapPoint)是SLAM系统中用来表示环境中三维特征点的抽象概念。这些点是通过相机观测和三角测量得到的,是地图构建的基础。三维位置每个地图点存储其在世界坐标系中的三维坐标P(X,Y,Z)P(
- 使用Llama 3.2-Vision多模态LLM与您的图像聊天
AI程序猿人
llamatransformerpytorch深度学习大模型应用人工智能大模型
介绍将视觉能力与大型语言模型(LLMs)结合的多模态LLM(MLLM)正在通过多模态LLM革命性地改变计算机视觉领域。这些模型结合了文本和视觉输入,展示了在图像理解和推理方面的出色能力。虽然这些模型以前只能通过API访问,但最近的开源选项现在允许本地执行,使其在生产环境中更具吸引力。在此教程中,我们将学习如何使用开源的Llama3.2-Vision模型与图像进行聊天,你会对其OCR、图像理解和推理
- AI大模型如何赋能电商行业,引领变革
虞书欣的C
人工智能开发语言
•个性化推荐:利用机器学习算法分析用户的历史购买记录、浏览行为和喜好,生成个性化的产品推荐列表,提升用户的购买意愿和满意度。•优化用户体验:•智能搜索引擎:运用自然语言处理技术,优化搜索引擎,让用户能够通过自然语言进行搜索。•虚拟客服:通过聊天机器人和语音助手,提供24/7的客户支持,快速解答用户咨询。•图像识别:利用计算机视觉技术,用户可以通过拍照识别商品,快速找到相似商品或进行排版搭配推荐。•
- 【视觉SLAM:六、视觉里程计Ⅰ:特征点法】
KeyPan
视觉SLAM计算机视觉人工智能机器学习数码相机算法深度学习
视觉里程计(VisualOdometry,VO)是通过处理图像序列,估计摄像头在时间上的相对位姿变化的技术。它是视觉SLAM的重要组成部分之一,主要通过提取图像中的信息(如特征点或直接像素强度)来实现相机运动估计。以下从特征点法、2D-2D对极几何、三角测量、3D-2D的PnP方法、3D-3D的ICP方法介绍视觉里程计的核心内容。特征点法特征点法是视觉里程计的经典方法,通过提取图像中的显著特征点,
- 3d系统误差分析
Ai智享
结构光3d数码相机计算机视觉
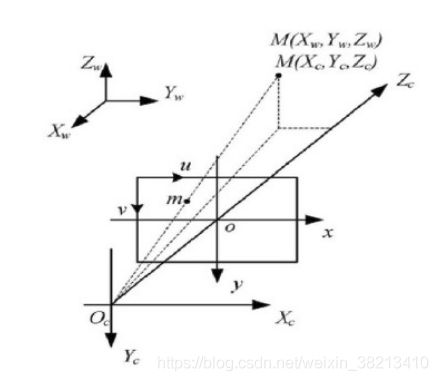
系统标定重投影误差预估在计算机视觉和三维重建领域中,评估一个相机系统标定精度的重要指标。通过比较真实的三维点在图像中的投影位置与标定模型计算出的投影位置之间的差异,来衡量标定的准确性。以下是对这一概念的详细解析:什么是系统标定?系统标定(SystemCalibration)是指对一个视觉系统(例如单目相机、双目相机系统或结构光系统)进行参数标定的过程,包括:内参标定:相机的内部参数(如焦距、光心、
- YOLOv8与Transformer:探索目标检测的新架构
AI架构设计之禅
AI大模型应用入门实战与进阶大数据AI人工智能计算科学神经计算深度学习神经网络大数据人工智能大型语言模型AIAGILLMJavaPython架构设计AgentRPA
YOLOv8与Transformer:探索目标检测的新架构关键词:目标检测,深度学习,YOLOv8,Transformer,计算机视觉,卷积神经网络摘要:目标检测是计算机视觉领域的一项重要任务,其目标是从图像或视频中识别和定位特定对象。近年来,YOLO(YouOnlyLookOnce)系列算法以其高精度和高速度成为目标检测领域的佼佼者。最新版本的YOLOv8引入了Transformer架构,进一步
- 基于Spring Boot和Vue的人脸识别项目(源码)
AI人H哥会Java
JAVA大作业项目实战springbootvue.jsjava人工智能计算机视觉后端sql
背景随着人工智能技术的迅猛发展,生物识别技术的迅猛发展,人脸识别已经成为最具潜力的人工智能应用之一。它不仅在安全监控、金融支付、智能家居等多个领域得到了广泛应用,也逐渐进入日常生活场景。人脸识别作为一种生物特征识别技术,能够通过分析人脸图像中的特征点,实现对个体的身份识别。利用计算机视觉技术,系统能够快速从大量图片中定位并识别特定人脸,实现身份验证和信息检索。这一技术的应用,不仅提高了安全性,还提
- 图像生成大模型:Imagen 详解
转角再相遇
imagenpython深度学习计算机视觉
近年来,图像生成技术取得了显著进展,推动了计算机视觉和生成对抗网络(GAN)等领域的发展。Imagen是一个新兴的图像生成大模型,其在生成高质量、逼真图像方面表现出色。本文将详细讲解Imagen的基本原理、架构、训练流程及应用场景。1.Imagen的基本原理1.1什么是Imagen?Imagen是一种基于深度学习的图像生成模型,结合了自注意力机制(Self-attentionMechanism)和
- 计算机视觉与深度学习:使用深度学习训练基于视觉的车辆检测器(MATLAB源码-Faster R-CNN)
ZhShy23
javascript深度学习
在人工智能领域,计算机视觉是一个重要且充满活力的研究方向。它使计算机能够理解和分析图像和视频数据,从而做出有意义的决策。其中,目标检测是计算机视觉中的一项关键技术,它旨在识别并定位图像中的多个目标对象。车辆检测作为目标检测的一个重要应用,在自动驾驶、智能交通系统等领域有着广泛的应用前景。本文将介绍如何使用MATLAB和深度学习技术,特别是FasterR-CNN模型,来训练一个车辆检测器。文章目录一
- OpenCV计算机视觉 08 图像的旋转
伊一大数据&人工智能学习日志
OpenCV计算机视觉人工智能计算机视觉opencv
图像的旋转下面是一张小猪佩奇的照片,请进行顺时针90度,逆时针90度,180度旋转方法一:使用了NumPy库的np.rot90()函数来实现图像的旋转np.rot90(img,k=-1)表示将输入的图像img顺时针旋转90度,np.rot90(img,k=1)表示将图像逆时针旋转90度。importcv2importnumpyasnp#导入原图img=cv2.imread('小猪佩奇.png')
- 通俗易懂 serverless 架构、微服务架构和云原生架构,并简单代码
Ai君臣
架构架构云原生serverless
文章目录1serverless架构、微服务架构和云原生架构区别1.Serverless架构示例:AWSLambda+APIGateway2.微服务架构示例:Flask微服务3.云原生架构示例:Docker和Kubernetes2Kubernetes中管理多个副本和流量两个关键组件1.Deployment2.Service负载均衡流量管理1serverless架构、微服务架构和云原生架构区别别用代码
- 详解AI大模型的主要指标与国内常见大模型对比分析
wit_@
人工智能AIGC语言模型ai大数据服务器
AI大模型的主要指标与国内常见大模型对比分析随着人工智能技术的快速发展,大模型(LargeAIModels)在自然语言处理、计算机视觉和多模态任务中取得了突破性进展。对于选择和评价AI大模型,不仅需要关注其功能,还要理解其关键指标和性能表现。本文将详细分析AI大模型的主要评价指标,并对国内常见大模型进行具体对比,提供实际数值和深度解析。一、AI大模型的主要指标AI大模型的性能和实用性通常通过以下指
- 深入了解卷积神经网络(CNN):图像处理与深度学习的革命性技术
wit_@
cnnpython机器学习深度学习scikit-learn
深入了解卷积神经网络(CNN):图像处理与深度学习的革命性技术导语卷积神经网络(CNN)是现代深度学习领域中最重要的模型之一,特别在计算机视觉(CV)领域具有革命性的影响。无论是图像分类、目标检测,还是人脸识别、语音处理,CNN都发挥了举足轻重的作用。随着技术的不断发展,CNN已经成为了解决众多实际问题的核心工具。但对于许多人来说,CNN仍然是一个相对复杂的概念,尤其是初学者可能会被其背后的数学原
- chatgpt赋能python:Python群发微信消息:解决方案
suimodina
ChatGptpythonchatgpt微信计算机
Python群发微信消息:解决方案肆无忌惮的群发微信消息,是否是你目前所需的解决方案?如果是,那么你来对地方了。Python是一门十分强大的编程语言,广泛用于各种人工智能、计算机视觉、机器学习等领域。Python可以用于开发各种应用程序,它也可以用于批量处理和发送微信消息。本文将概述如何用Python发送微信消息。我们将介绍用Python实现微信消息的流程和步骤,并提供一些有关如何使用Python
- 人工智能OpenCV计算机视觉技术
yzx991013
OpenCV基础全集opencv计算机视觉人工智能
5.3cand可调节边缘检测完整代码:importcv2importnumpyasnp#载入图像,并处理可能的读取错误img_original=cv2.imread('./image/lena.jpg')ifimg_originalisNone:print("无法读取图像文件")raiseSystemExit#创建可调整大小的窗口cv2.namedWindow('Canny',cv2.WINDOW
- 从点云中剔除遮挡点
AuSwift
点云
在三维计算机视觉和点云处理中,点云是由大量的三维点组成的数据集。然而,有时候点云中的某些点可能会被其他物体所遮挡,这可能会对进一步的分析和处理造成困扰。本文将介绍如何使用MATLAB从点云中移除这些遮挡点。在开始之前,请确保你已经安装了MATLAB和PointCloudProcessingToolbox。接下来,我们将按照以下步骤进行操作。步骤1:加载点云数据首先,我们需要加载点云数据。假设我们的
- 【cs.CV】25.1.14 arxiv更新速递
hinmer
CV每日更新arxivchatgptgpt人工智能自然语言处理自动驾驶计算机视觉ai
【cs.CV】25.1.14arxiv更新110篇—第1篇----=====Omni-RGPT:UnifyingImageandVideoRegion-levelUnderstandingviaTokenMarks关键词:计算机视觉,多模态大语言模型,区域级理解,TokenMark,视频理解链接1摘要:我们提出了Omni-RGPT,这是一种多模态大型语言模型,旨在促进图像和视频的区域级理解。为了在
- PCL 点云高程渲染:实现点云高程信息的颜色渲染
技术征服冒险
PCL
PCL点云高程渲染:实现点云高程信息的颜色渲染点云渲染在计算机视觉和图形学中具有重要的应用价值。在处理点云数据时,一种常见的需求是通过将高程信息映射到颜色空间,以实现对点云的可视化。本文将介绍如何使用PCL(PointCloudLibrary)库实现点云的高程渲染,并提供相应的源代码。引言在开始之前,我们首先需要了解点云的基本概念。点云是由大量的三维点组成的数据集合,每个点都具有X、Y和Z坐标。点
- 【视觉惯性SLAM:十五、ORB-SLAM3中的IMU预积分】
KeyPan
视觉惯性SLAM计算机视觉视觉检测
15.1视觉惯性紧耦合15.1.1视觉惯性紧耦合的重要性视觉惯性紧耦合(Visual-InertialTightCoupling)在ORB-SLAM3中的作用不可替代,是实现高鲁棒性和高精度定位的核心技术。单一的视觉SLAM主要依赖于图像特征进行定位和建图,这种方法虽然能够在许多环境中获得良好的效果,但其鲁棒性容易受到动态变化、光照条件恶化以及环境特征稀缺等因素的限制。例如,昏暗场景或快速运动可能
- 全新 Hopper 架构的Transformer 引擎有什么特点?
扫地的小何尚
人工智能
Transformer引擎是全新Hopper架构的一部分,将显著提升AI性能和功能,并助力在几天或几小时内训练大型模型。Transformer模型是当今广泛使用的语言模型(例如asBERT和GPT-3)的支柱。Transformer模型最初针对自然语言处理用例而开发,但因其通用性,现在逐步应用于计算机视觉、药物研发等领域。与此同时,模型大小不断呈指数级增长,现在已达到数万亿个参数。由于计算量巨大,
- MATLAB语言的计算机基础
疯狂小小小码农
包罗万象golang开发语言后端
MATLAB语言的计算机基础引言在当今信息技术飞速发展的时代,编程能力已成为当代人士必备的一项基本技能。MATLAB(矩阵实验室)作为一种高级编程语言和环境,广泛应用于数据分析、算法开发、模型创建、数字图像处理和计算机视觉等多个领域。MATLAB以其强大的矩阵运算和可视化能力,成为了科研人员和工程师的重要工具,尤其在数学、物理、工程等学科中,它的应用不可或缺。本文将从MATLAB的基本概念、环境搭
- YOLOv8重磅升级:引入DenseOne密集网络革新主干设计,重塑YOLO目标检测性能新高度
程序员杨弋
YOLO目标检测人工智能
随着深度学习技术的不断进步,目标检测作为计算机视觉领域的重要任务之一,其性能和应用范围也在不断扩大。作为目标检测领域的佼佼者,YOLO(YouOnlyLookOnce)系列算法以其出色的性能和实时性受到了广泛关注。而最近提出的YOLOv8更是在前代版本的基础上进行了多项优化,进一步提升了检测精度和速度。然而,尽管YOLOv8已经取得了显著的进步,但在处理复杂场景和遮挡问题时,仍然存在一定的挑战。为
- 基于深度学习的人脸表情识别系统:YOLOv5 + YOLOv8 + YOLOv10 + UI界面 + 数据集
2025年数学建模美赛
深度学习YOLOui分类人工智能
引言随着人工智能的飞速发展,深度学习技术已广泛应用于各个领域,尤其是在计算机视觉领域。人脸识别和表情识别是其中的一个重要应用,能够在多种场景下提供重要的信息,例如安全监控、情感分析、智能客服、健康监测等。在人脸表情识别任务中,准确识别人脸的情感状态(如高兴、愤怒、悲伤等)是一个极具挑战性的任务。随着YOLO系列算法的不断进步,YOLOv5、YOLOv8和YOLOv10的推出大大提高了目标检测的精度
- 基于YOLOv8深度学习的人脸年龄检测识别系统
2025年数学建模美赛
YOLO深度学习人工智能ui数据挖掘分类
引言随着人工智能和计算机视觉的飞速发展,人脸分析技术在年龄检测领域取得了显著进展。人脸年龄检测系统在安全监控、广告推荐、健康监测等领域有广泛应用。本文将基于YOLOv8目标检测模型和UI界面,开发一个完整的人脸年龄检测识别系统。我们将详细介绍项目的技术实现、数据集构建、模型训练以及UI设计,并附上完整代码。目录引言系统架构设计数据准备公开人脸年龄数据集数据标注格式数据目录结构模型训练YOLOv8环
- VSLAM技术实现机器人在不同场景下的精准导航、避障
向阳而生|X
自主导航python计算机视觉
链接:https://developer.orbbec.com.cn/forum_plate_module_details.html?id=998
- 视觉SLAM学习打卡【8-1】-视觉里程计·直接法
肝帝永垂不朽
#SLAM计算机视觉opencvc++
本节直接法与上节特征点法,为视觉里程计估计位姿的两大主流方法。而在引出直接法前,先介绍光流法(二者均对灰度值I做文章)。至此,前端VO总算结束了。学下来一个感受就是前几章的数学基础很重要,尤其是构建最小二乘的非线性优化(BA),几乎每种方法都有其一席之地。视觉SLAM学习打卡【8-1】-视觉里程计·直接法一、光流法(1)前提(实际中较难满足)(2)理论推导(3)附:超定方程求解二、直接法(1)理论
- 从零开始搭二维激光SLAM --- 序章
李太白lx
从零开始搭二维激光SLAMSLAM
为什么要做这个开源项目1我的SLAM接触史1.1硕士阶段从17年3月开始接触SLAM,到现在已经3年了。虽然时间很长,但并不是所有时间都在单纯的搞SLAM。17年3月,研一下学期的时候选的课题题目,基于SLAM的室内移动机器人导航技术研究。之前并没有接触过SLAM,ROS等等。就连c++都是16年研一上学期的时候学的(大一学过以后没再接触过)。从17年3月开始学ROS,开始了解SLAM,还看了概率
- AlexNet:开启深度学习图像识别新纪元
池央
深度学习人工智能
一、引言在深度学习的璀璨星空中,AlexNet无疑是一颗极为耀眼的明星。它于2012年横空出世,并在ImageNet竞赛中一举夺冠,这一历史性的突破彻底改变了计算机视觉领域的发展轨迹,让全世界深刻认识到深度卷积神经网络在图像识别任务中的巨大潜力,从而掀起了深度学习研究与应用的热潮。二、AlexNet网络架构详解(一)输入层AlexNet的输入图像通常为224x224x3的彩色图像。这一尺寸的确定是
- Python基于YOLOv8和OpenCV实现车道线和车辆检测
old_power
计算机视觉YOLOopencv计算机视觉python
使用YOLOv8(YouOnlyLookOnce)和OpenCV实现车道线和车辆检测,目标是创建一个可以检测道路上的车道并识别车辆的系统,并估计它们与摄像头的距离。该项目结合了计算机视觉技术和深度学习物体检测。1、系统主要功能车道检测:使用边缘检测和霍夫线变换检测道路车道。汽车检测:使用YOLOv8模型识别汽车并在汽车周围绘制边界框。距离估计:使用边界框大小计算检测到的汽车与摄像头的距离。2、环境
- java线程Thread和Runnable区别和联系
zx_code
javajvmthread多线程Runnable
我们都晓得java实现线程2种方式,一个是继承Thread,另一个是实现Runnable。
模拟窗口买票,第一例子继承thread,代码如下
package thread;
public class ThreadTest {
public static void main(String[] args) {
Thread1 t1 = new Thread1(
- 【转】JSON与XML的区别比较
丁_新
jsonxml
1.定义介绍
(1).XML定义
扩展标记语言 (Extensible Markup Language, XML) ,用于标记电子文件使其具有结构性的标记语言,可以用来标记数据、定义数据类型,是一种允许用户对自己的标记语言进行定义的源语言。 XML使用DTD(document type definition)文档类型定义来组织数据;格式统一,跨平台和语言,早已成为业界公认的标准。
XML是标
- c++ 实现五种基础的排序算法
CrazyMizzz
C++c算法
#include<iostream>
using namespace std;
//辅助函数,交换两数之值
template<class T>
void mySwap(T &x, T &y){
T temp = x;
x = y;
y = temp;
}
const int size = 10;
//一、用直接插入排
- 我的软件
麦田的设计者
我的软件音乐类娱乐放松
这是我写的一款app软件,耗时三个月,是一个根据央视节目开门大吉改变的,提供音调,猜歌曲名。1、手机拥有者在android手机市场下载本APP,同意权限,安装到手机上。2、游客初次进入时会有引导页面提醒用户注册。(同时软件自动播放背景音乐)。3、用户登录到主页后,会有五个模块。a、点击不胫而走,用户得到开门大吉首页部分新闻,点击进入有新闻详情。b、
- linux awk命令详解
被触发
linux awk
awk是行处理器: 相比较屏幕处理的优点,在处理庞大文件时不会出现内存溢出或是处理缓慢的问题,通常用来格式化文本信息
awk处理过程: 依次对每一行进行处理,然后输出
awk命令形式:
awk [-F|-f|-v] ‘BEGIN{} //{command1; command2} END{}’ file
[-F|-f|-v]大参数,-F指定分隔符,-f调用脚本,-v定义变量 var=val
- 各种语言比较
_wy_
编程语言
Java Ruby PHP 擅长领域
- oracle 中数据类型为clob的编辑
知了ing
oracle clob
public void updateKpiStatus(String kpiStatus,String taskId){
Connection dbc=null;
Statement stmt=null;
PreparedStatement ps=null;
try {
dbc = new DBConn().getNewConnection();
//stmt = db
- 分布式服务框架 Zookeeper -- 管理分布式环境中的数据
矮蛋蛋
zookeeper
原文地址:
http://www.ibm.com/developerworks/cn/opensource/os-cn-zookeeper/
安装和配置详解
本文介绍的 Zookeeper 是以 3.2.2 这个稳定版本为基础,最新的版本可以通过官网 http://hadoop.apache.org/zookeeper/来获取,Zookeeper 的安装非常简单,下面将从单机模式和集群模式两
- tomcat数据源
alafqq
tomcat
数据库
JNDI(Java Naming and Directory Interface,Java命名和目录接口)是一组在Java应用中访问命名和目录服务的API。
没有使用JNDI时我用要这样连接数据库:
03. Class.forName("com.mysql.jdbc.Driver");
04. conn
- 遍历的方法
百合不是茶
遍历
遍历
在java的泛
- linux查看硬件信息的命令
bijian1013
linux
linux查看硬件信息的命令
一.查看CPU:
cat /proc/cpuinfo
二.查看内存:
free
三.查看硬盘:
df
linux下查看硬件信息
1、lspci 列出所有PCI 设备;
lspci - list all PCI devices:列出机器中的PCI设备(声卡、显卡、Modem、网卡、USB、主板集成设备也能
- java常见的ClassNotFoundException
bijian1013
java
1.java.lang.ClassNotFoundException: org.apache.commons.logging.LogFactory 添加包common-logging.jar2.java.lang.ClassNotFoundException: javax.transaction.Synchronization
- 【Gson五】日期对象的序列化和反序列化
bit1129
反序列化
对日期类型的数据进行序列化和反序列化时,需要考虑如下问题:
1. 序列化时,Date对象序列化的字符串日期格式如何
2. 反序列化时,把日期字符串序列化为Date对象,也需要考虑日期格式问题
3. Date A -> str -> Date B,A和B对象是否equals
默认序列化和反序列化
import com
- 【Spark八十六】Spark Streaming之DStream vs. InputDStream
bit1129
Stream
1. DStream的类说明文档:
/**
* A Discretized Stream (DStream), the basic abstraction in Spark Streaming, is a continuous
* sequence of RDDs (of the same type) representing a continuous st
- 通过nginx获取header信息
ronin47
nginx header
1. 提取整个的Cookies内容到一个变量,然后可以在需要时引用,比如记录到日志里面,
if ( $http_cookie ~* "(.*)$") {
set $all_cookie $1;
}
变量$all_cookie就获得了cookie的值,可以用于运算了
- java-65.输入数字n,按顺序输出从1最大的n位10进制数。比如输入3,则输出1、2、3一直到最大的3位数即999
bylijinnan
java
参考了网上的http://blog.csdn.net/peasking_dd/article/details/6342984
写了个java版的:
public class Print_1_To_NDigit {
/**
* Q65.输入数字n,按顺序输出从1最大的n位10进制数。比如输入3,则输出1、2、3一直到最大的3位数即999
* 1.使用字符串
- Netty源码学习-ReplayingDecoder
bylijinnan
javanetty
ReplayingDecoder是FrameDecoder的子类,不熟悉FrameDecoder的,可以先看看
http://bylijinnan.iteye.com/blog/1982618
API说,ReplayingDecoder简化了操作,比如:
FrameDecoder在decode时,需要判断数据是否接收完全:
public class IntegerH
- js特殊字符过滤
cngolon
js特殊字符js特殊字符过滤
1.js中用正则表达式 过滤特殊字符, 校验所有输入域是否含有特殊符号function stripscript(s) { var pattern = new RegExp("[`~!@#$^&*()=|{}':;',\\[\\].<>/?~!@#¥……&*()——|{}【】‘;:”“'。,、?]"
- hibernate使用sql查询
ctrain
Hibernate
import java.util.Iterator;
import java.util.List;
import java.util.Map;
import org.hibernate.Hibernate;
import org.hibernate.SQLQuery;
import org.hibernate.Session;
import org.hibernate.Transa
- linux shell脚本中切换用户执行命令方法
daizj
linuxshell命令切换用户
经常在写shell脚本时,会碰到要以另外一个用户来执行相关命令,其方法简单记下:
1、执行单个命令:su - user -c "command"
如:下面命令是以test用户在/data目录下创建test123目录
[root@slave19 /data]# su - test -c "mkdir /data/test123"
- 好的代码里只要一个 return 语句
dcj3sjt126com
return
别再这样写了:public boolean foo() { if (true) { return true; } else { return false;
- Android动画效果学习
dcj3sjt126com
android
1、透明动画效果
方法一:代码实现
public View onCreateView(LayoutInflater inflater, ViewGroup container, Bundle savedInstanceState)
{
View rootView = inflater.inflate(R.layout.fragment_main, container, fals
- linux复习笔记之bash shell (4)管道命令
eksliang
linux管道命令汇总linux管道命令linux常用管道命令
转载请出自出处:
http://eksliang.iteye.com/blog/2105461
bash命令执行的完毕以后,通常这个命令都会有返回结果,怎么对这个返回的结果做一些操作呢?那就得用管道命令‘|’。
上面那段话,简单说了下管道命令的作用,那什么事管道命令呢?
答:非常的经典的一句话,记住了,何为管
- Android系统中自定义按键的短按、双击、长按事件
gqdy365
android
在项目中碰到这样的问题:
由于系统中的按键在底层做了重新定义或者新增了按键,此时需要在APP层对按键事件(keyevent)做分解处理,模拟Android系统做法,把keyevent分解成:
1、单击事件:就是普通key的单击;
2、双击事件:500ms内同一按键单击两次;
3、长按事件:同一按键长按超过1000ms(系统中长按事件为500ms);
4、组合按键:两个以上按键同时按住;
- asp.net获取站点根目录下子目录的名称
hvt
.netC#asp.nethovertreeWeb Forms
使用Visual Studio建立一个.aspx文件(Web Forms),例如hovertree.aspx,在页面上加入一个ListBox代码如下:
<asp:ListBox runat="server" ID="lbKeleyiFolder" />
那么在页面上显示根目录子文件夹的代码如下:
string[] m_sub
- Eclipse程序员要掌握的常用快捷键
justjavac
javaeclipse快捷键ide
判断一个人的编程水平,就看他用键盘多,还是鼠标多。用键盘一是为了输入代码(当然了,也包括注释),再有就是熟练使用快捷键。 曾有人在豆瓣评
《卓有成效的程序员》:“人有多大懒,才有多大闲”。之前我整理了一个
程序员图书列表,目的也就是通过读书,让程序员变懒。 写道 程序员作为特殊的群体,有的人可以这么懒,懒到事情都交给机器去做,而有的人又可
- c++编程随记
lx.asymmetric
C++笔记
为了字体更好看,改变了格式……
&&运算符:
#include<iostream>
using namespace std;
int main(){
int a=-1,b=4,k;
k=(++a<0)&&!(b--
- linux标准IO缓冲机制研究
音频数据
linux
一、什么是缓存I/O(Buffered I/O)缓存I/O又被称作标准I/O,大多数文件系统默认I/O操作都是缓存I/O。在Linux的缓存I/O机制中,操作系统会将I/O的数据缓存在文件系统的页缓存(page cache)中,也就是说,数据会先被拷贝到操作系统内核的缓冲区中,然后才会从操作系统内核的缓冲区拷贝到应用程序的地址空间。1.缓存I/O有以下优点:A.缓存I/O使用了操作系统内核缓冲区,
- 随想 生活
暗黑小菠萝
生活
其实账户之前就申请了,但是决定要自己更新一些东西看也是最近。从毕业到现在已经一年了。没有进步是假的,但是有多大的进步可能只有我自己知道。
毕业的时候班里12个女生,真正最后做到软件开发的只要两个包括我,PS:我不是说测试不好。当时因为考研完全放弃找工作,考研失败,我想这只是我的借口。那个时候才想到为什么大学的时候不能好好的学习技术,增强自己的实战能力,以至于后来找工作比较费劲。我
- 我认为POJO是一个错误的概念
windshome
javaPOJO编程J2EE设计
这篇内容其实没有经过太多的深思熟虑,只是个人一时的感觉。从个人风格上来讲,我倾向简单质朴的设计开发理念;从方法论上,我更加倾向自顶向下的设计;从做事情的目标上来看,我追求质量优先,更愿意使用较为保守和稳妥的理念和方法。
&

 ,
,





