VTK vtkOBBTree 有向包围盒
vtkOBBTree 有向包围盒
vtkOBBTree是一个包围盒的树,它将体的每个cell分割到每个小的包围盒中,由SetNumberOfBuckets确定每个盒中放多少个 Cell。建立一个vtkOBBTree要先设定DataSet,SetDataSet。然后调用BuildLocator。包围盒精细程度由递归深度 (MaxLevel)以及预先设置的NumberOfBuckets决定。
使用场景:
可以用vtkOBBTree和直线、三角形甚至是另一个vtkOBBTree做相交检测、运算,碰撞检测;
可以用来,获得直线与多边形数据的交点;用来求最近点;等;
1.二个vtkOBBTree 求交:
vtkOBBTree * targetTree = vtkOBBTree::New();
targetTree->SetDataSet(targetPoly);
targetTree->BuildLocator();
vtkOBBTree * clipTree = vtkOBBTree::New();
clipTree->SetDataSet(clipPoly);
clipTree->BuildLocator();
//使用包围盒求交 ,求交部分在OBBNodeIntersected中。NULL表示不做任何转换
clipTree->IntersectWithOBBTree(targetTree,NULL,OBBNodeIntersected,this);
//OBBNodeIntersected函数的定义:
static int OBBNodeIntersected(vtkOBBNode *, vtkOBBNode *, vtkMatrix4x4 *,void *); 2.官方样例:OBBTreeExtractCells.cxx
使用 vtkOBBTree
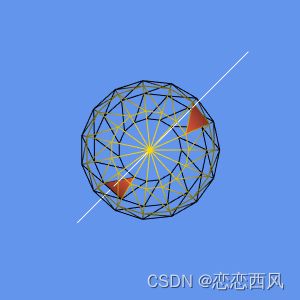
IntersectWithLine获取 线和 包围盒的 交点和 交点所在Cell;
vtkOBBTree 返回一条线和数据集的所有交点。 如果要最近的相交,则必须手 动找到它。 在此示例中,我们创建一个球体,并将其与一条直线相交。
这里其实也可以用于求,鼠标点击 Pick 到的点;鼠标的2D点,转成 世界坐标,加上相机的点,再延长;也是一条线,求出最近的点 ;也就是鼠标 Pick 到的点;
CODE
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
int main(int, char*[])
{
vtkNew colors;
vtkNew sphereSource;
sphereSource->SetPhiResolution(7);
sphereSource->SetThetaResolution(15);
sphereSource->Update();
// Create the locator
vtkNew tree;
tree->SetDataSet(sphereSource->GetOutput());
tree->BuildLocator();
// Intersect the locator with the line
double lineP0[3] = {-0.6, -0.6, -0.6};
double lineP1[3] = {.6, .6, .6};
vtkNew intersectPoints;
vtkNew intersectCells;
double tol = 1.e-8;
tree->SetTolerance(tol);
tree->IntersectWithLine(lineP0, lineP1, intersectPoints, intersectCells);
std::cout << "NumPoints: " << intersectPoints->GetNumberOfPoints()
<< std::endl;
// Display list of intersections
double intersection[3];
for (int i = 0; i < intersectPoints->GetNumberOfPoints(); i++)
{
intersectPoints->GetPoint(i, intersection);
std::cout << "\tPoint Intersection " << i << ": " << intersection[0] << ", "
<< intersection[1] << ", " << intersection[2] << std::endl;
}
std::cout << "NumCells: " << intersectCells->GetNumberOfIds() << std::endl;
vtkIdType cellId;
for (int i = 0; i < intersectCells->GetNumberOfIds(); i++)
{
cellId = intersectCells->GetId(i);
std::cout << "\tCellId " << i << ": " << cellId << std::endl;
}
// Render the line, sphere and intersected cells
vtkNew lineSource;
lineSource->SetPoint1(lineP0);
lineSource->SetPoint2(lineP1);
vtkNew lineMapper;
lineMapper->SetInputConnection(lineSource->GetOutputPort());
vtkNew lineActor;
lineActor->SetMapper(lineMapper);
vtkNew sphereMapper;
sphereMapper->SetInputConnection(sphereSource->GetOutputPort());
vtkNew sphereActor;
sphereActor->SetMapper(sphereMapper);
sphereActor->GetProperty()->SetRepresentationToWireframe();
sphereActor->GetProperty()->SetColor(colors->GetColor3d("Gold").GetData());
vtkNew cellSource;
cellSource->SetInputConnection(sphereSource->GetOutputPort());
cellSource->SetCellList(intersectCells);
vtkNew cellMapper;
cellMapper->SetInputConnection(cellSource->GetOutputPort());
vtkNew cellActor;
cellActor->SetMapper(cellMapper);
cellActor->GetProperty()->SetColor(colors->GetColor3d("Tomato").GetData());
vtkNew renderer;
vtkNew renderWindow;
renderWindow->AddRenderer(renderer);
vtkNew renderWindowInteractor;
renderWindowInteractor->SetRenderWindow(renderWindow);
renderer->AddActor(lineActor);
renderer->AddActor(sphereActor);
renderer->AddActor(cellActor);
renderer->SetBackground(colors->GetColor3d("CornflowerBlue").GetData());
renderWindow->SetWindowName("OBBTreeExtractCells");
renderWindow->Render();
renderWindowInteractor->Start();
return EXIT_SUCCESS;
} 3.官方样例 包围盒可视化

int maxLevel = 5;
// Create the tree
vtkNew obbTree;
obbTree->SetDataSet(polyData);
obbTree->SetMaxLevel(maxLevel);
obbTree->BuildLocator();
double corner[3] = {0.0, 0.0, 0.0};
double max[3] = {0.0, 0.0, 0.0};
double mid[3] = {0.0, 0.0, 0.0};
double min[3] = {0.0, 0.0, 0.0};
double size[3] = {0.0, 0.0, 0.0};
obbTree->ComputeOBB(polyData, corner, max, mid, min, size);
// Initialize the representation
vtkNew polydata;
obbTree->GenerateRepresentation(0, polydata);
vtkNew obbtreeMapper;
obbtreeMapper->SetInputData(polydata);
vtkNew obbtreeActor;
obbtreeActor->SetMapper(obbtreeMapper);
obbtreeActor->GetProperty()->SetInterpolationToFlat();
obbtreeActor->GetProperty()->SetOpacity(.5);
obbtreeActor->GetProperty()->EdgeVisibilityOn();
obbtreeActor->GetProperty()->SetColor(
colors->GetColor4d("SpringGreen").GetData());