计算机视觉入门 5)自定义卷积网络
系列文章目录
- 计算机视觉入门 1)卷积分类器
- 计算机视觉入门 2)卷积和ReLU
- 计算机视觉入门 3)最大池化
- 计算机视觉入门 4)滑动窗口
- 计算机视觉入门 5)自定义卷积网络
- 计算机视觉入门 6) 数据集增强(Data Augmentation)
提示:仅为个人学习笔记分享,若有错漏请各位老师同学指出,Thanks♪(・ω・)ノ
目录
- 系列文章目录
- 一、自定义卷积网络
-
- 从简单到精细
- 卷积块
- 二、【代码示例】构建一个简单的卷积网络
-
- 步骤1 - 加载数据
- 步骤2 - 定义模型
- 步骤3 - 训练模型
一、自定义卷积网络
从简单到精细
前几篇笔记介绍了卷积网络通过三个操作进行特征提取:过滤,检测和压缩。一次特征提取只能从图像中提取相对简单的特征,例如简单的线条或对比度。这些特征对于解决大多数分类问题来说过于简单。相反,卷积网络会一遍又一遍地重复这个提取过程,使特征在网络内部深入传递时变得更加复杂和精细。

卷积块
它通过将图像通过一系列的卷积块来进行这个过程,从而实现这一点。

这些卷积块是Conv2D和MaxPool2D层的堆叠,如下所示:
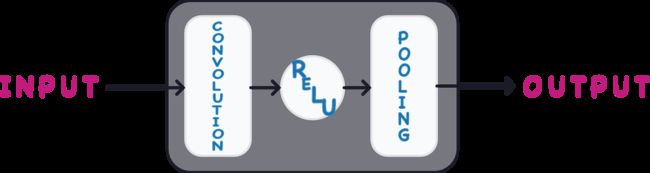
每个块代表一轮提取,通过组合这些块,卷积网络可以将产生的特征组合和重新组合。现代卷积网络的深层结构使得这种复杂的特征工程成为可能,从而大大提高它们在处理和解决任务上的性能。
二、【代码示例】构建一个简单的卷积网络
步骤1 - 加载数据
# 导入库
import os, warnings
import matplotlib.pyplot as plt
from matplotlib import gridspec
import numpy as np
import tensorflow as tf
from tensorflow.keras.preprocessing import image_dataset_from_directory
# 设置随机种子以保证可复现性
def set_seed(seed=31415):
np.random.seed(seed)
tf.random.set_seed(seed)
os.environ['PYTHONHASHSEED'] = str(seed)
os.environ['TF_DETERMINISTIC_OPS'] = '1'
set_seed()
# 设置Matplotlib默认值
plt.rc('figure', autolayout=True)
plt.rc('axes', labelweight='bold', labelsize='large',
titleweight='bold', titlesize=18, titlepad=10)
plt.rc('image', cmap='magma')
warnings.filterwarnings("ignore") # 清理输出单元格
# 加载训练集和验证集
ds_train_ = image_dataset_from_directory(
'../input/car-or-truck/train',
labels='inferred',
label_mode='binary',
image_size=[128, 128],
interpolation='nearest',
batch_size=64,
shuffle=True,
)
ds_valid_ = image_dataset_from_directory(
'../input/car-or-truck/valid',
labels='inferred',
label_mode='binary',
image_size=[128, 128],
interpolation='nearest',
batch_size=64,
shuffle=False,
)
# 数据处理管道
def convert_to_float(image, label):
image = tf.image.convert_image_dtype(image, dtype=tf.float32)
return image, label
AUTOTUNE = tf.data.experimental.AUTOTUNE
ds_train = (
ds_train_
.map(convert_to_float)
.cache()
.prefetch(buffer_size=AUTOTUNE)
)
ds_valid = (
ds_valid_
.map(convert_to_float)
.cache()
.prefetch(buffer_size=AUTOTUNE)
)
步骤2 - 定义模型
下面是我们将使用的模型的图示:
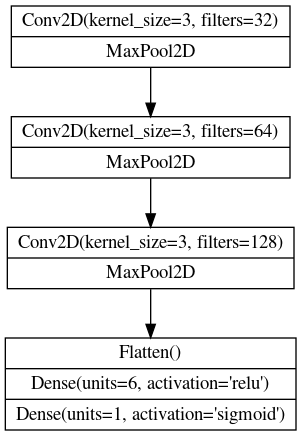
现在我们来定义模型。注意我们的模型由三个 Conv2D 和 MaxPool2D 层块组成,后面跟着一些 Dense 层。我们可以通过填写适当的参数,将这个图示基本上直接转化为一个 Keras Sequential 模型。
from tensorflow import keras
from tensorflow.keras import layers
model = keras.Sequential([
# 第一个卷积块
layers.Conv2D(filters=32, kernel_size=5, activation="relu", padding='same',
# 在第一层中提供输入维度
# [高度, 宽度, 颜色通道(RGB)]
input_shape=[128, 128, 3]),
layers.MaxPool2D(),
# 第二个卷积块
layers.Conv2D(filters=64, kernel_size=3, activation="relu", padding='same'),
layers.MaxPool2D(),
# 第三个卷积块
layers.Conv2D(filters=128, kernel_size=3, activation="relu", padding='same'),
layers.MaxPool2D(),
# 分类头部
layers.Flatten(),
layers.Dense(units=6, activation="relu"),
layers.Dense(units=1, activation="sigmoid"),
])
model.summary()
这个代码定义了一个包含三个卷积块的模型,每个块都由一个 Conv2D 层和一个 MaxPool2D 层组成。最后的分类头部包括一个扁平化层(Flatten),两个密集连接层(Dense),用于输出预测结果。模型总共有大约50万个参数,它们将根据训练数据进行调整以进行有效的特征提取和分类。
输出模型Summary:
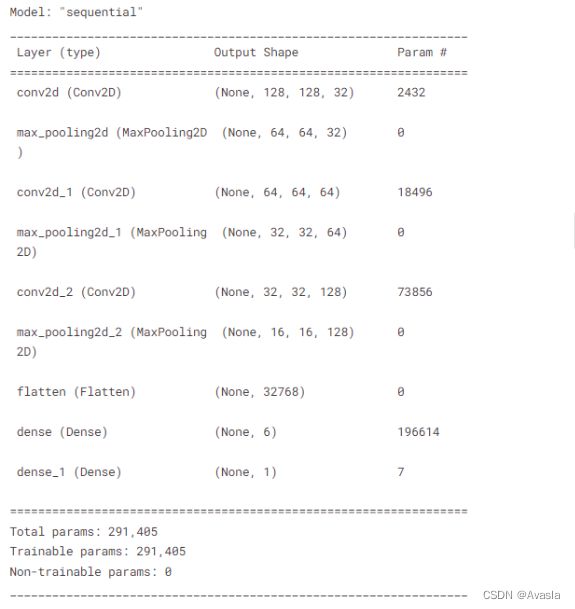
注意:这里每个块的过滤器数量都是逐块翻倍增加的:32、64、128。这是一种常见的模式。由于MaxPool2D层在每个块中降低了特征图的尺寸,因此我们可以逐块增加我们创建的特征图数量。
步骤3 - 训练模型
# 加入损失函数和准确率
model.compile(
optimizer=tf.keras.optimizers.Adam(epsilon=0.01),
loss='binary_crossentropy',
metrics=['binary_accuracy']
)
#模型训练
history = model.fit(
ds_train,
validation_data=ds_valid,
epochs=40,
verbose=0,
)
import pandas as pd
#结果查看
history_frame = pd.DataFrame(history.history)
history_frame.loc[:, ['loss', 'val_loss']].plot()
history_frame.loc[:, ['binary_accuracy', 'val_binary_accuracy']].plot();
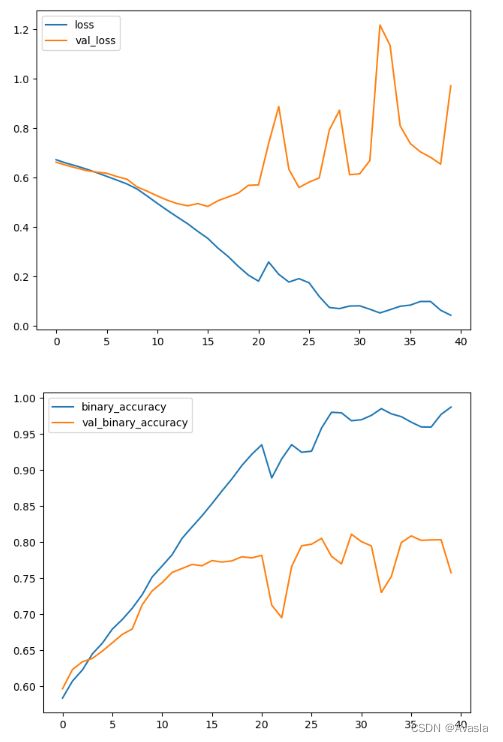
这个模型只有简单的3个卷积层,尽管如此,它仍然能够相当好地适应这个数据集。
见上图,蓝色曲线快速地变化,同时黄色曲线(验证集val)在10轮训练过程后就进入波动稳定的状态, 这表明模型容易过拟合,需要正则化处理。
后续可以添加更多的卷积层、或者Dropout层来进行正则化,继续改进这个模型。