ICCV 2023 | 小鹏汽车纽约石溪:局部上下文感知主动域自适应LADA
摘要
主动域自适应(ADA)通过查询少量选定的目标域样本的标签,以帮助模型从源域迁移到目标域。查询数据的局部上下文信息非常重要,特别是在域间差异较大的情况下,然而现有的ADA方法尚未充分探索这一点。在本文中,作者提出了一种名为LADA的局部上下文感知ADA框架。为了选择信息丰富的目标域样本,作者设计了一种基于模型预测分布的局部不一致性的新准则。同时,由于标注预算通常较小,仅在查询数据上微调模型相对低效,作者逐步将相邻的置信样本增加到有标记的目标域数据中,并维持类别平衡。实验表明,文中所提出的主动学习准则相比现有的策略能选择更具信息量的目标域样本。此外,本文提出的整体方法在各种基准测试中显著优于现有最好的ADA方法。

论文链接: https://arxiv.org/abs/2208.12856
代码链接: https://github.com/tsun/LADA
01. 引言
无监督域自适应(UDA)需要将源域中的模型迁移到无标记数据的目标域上,这是一个具有挑战性的任务,尤其是当源域和目标域之间存在较大的差异时。近年来,主动域自适应(ADA)颇受关注,它通过查询选定目标域样本的标签来辅助域自适应,可以在最小标记成本下获得优异的性能。虽然ADA取得了进展,但对于查询数据的局部上下文尚未充分探索。传统的主动学习方法,通常选择模型不确定的,或具有代表性的未标记样本进行标签查询。但在ADA中,因为可以使用有标记的源域数据且源域和目标域之间存在分布差异,类似的方法可能效果不佳。利用目标域样本的局部上下文信息可以指导查询样本的选择,在模型微调过程中,也可以降低模型只记住新查询数据的倾向,以便后续的训练轮次聚焦在更难的样本上。在域间差异较大的情况下,利用查询数据的相邻数据也更加可信。
本文提出了Local context-aware Active Domain Adaptation(LADA)框架,即基于局部上下文感知的主动域自适应。首先,作者设计了Local context-aware Active Selection (LAS) 模块,基于模型预测分布的局部不一致性,从不确定区域选择多样化的子集进行标签查询。然后,作者设计了Progressive Anchor-set Augmentation (PAA) 模块以解决可查询数据规模小和数据不平衡的问题,通过逐步增加置信目标域数据进行模型微调。
本文的贡献包括:
1)验证了在ADA中利用查询数据的上下文,可以指导主动选择并改进模型参数更新。
2)设计了LAS模块,提出了基于模型预测分布局部不一致性的主动选择准则,使得模型可以选择比现有主动选择准则信息更丰富的样本。
3)设计了PAA模块,以克服查询数据规模较小的问题,并逐步以类别平衡的方式使用置信样本来增广有标记目标域数据。
02. 本文方法
2.1 问题定义

2.2 方法综述
作者利用查询数据的上下文来选择更具信息量的目标域样本,并改善模型更新。局部上下文感知主动选择(LAS)模块通过模型预测分布的局部不一致性(LI)分数对所有未标记的目标域样本进行排序,然后选择得分最高的一个多样化子集来查询标签;迭代标记数据增广(PAA)模块逐步添加置信目标域样本,并保持类别平衡。这两个模块交替运行,直到用尽标记预算。
2.3 局部上下文感知主动选择

2.4 迭代标记数据增广

03.实验
作者在四个广泛使用的域适应基准测试集上进行了实验:Office-31,Office-Home,VisDA和DomainNet。Office-Home RSUT是Office-Home的一个子集,其构造过程显式地使源域和目标域具有较大的类分布差异。
作者使用预训练的ResNet-50作为骨干网络,并进行5轮主动选择,标记预算B为5%或者10%目标域数据。为了公平比较,作者在统一框架中复现了几种传统的主动学习准则,包括随机选择(RAN),最低置信度(CONF),熵(ENT),预测概率间隔(MAR),CoreSet,BADGE,以及AADA和CLUE等ADA方法。对于最近的一些ADA方法,如S3VAADA ,TQS和LAMDA,作者从相应的论文中获取了结果。
作者在所有数据集上设置置信度阈值 τ 为0.9。对于Office-31,邻域大小 K 为5,其他数据集 K 为10。作者通过经验公式设置 M ,使得大约有12%的未标记目标数据作为候选集。由于VisDA每个类别的数据量巨大,作者将经验值减半。更多的实现细节和分析可以在补充材料中找到。
3.1 主要结果
标准数据集上ADA方法比较。在Office-Home数据集上,使用5%标签预算,结果列在表1中。在各种主动选择准则中,基于不确定性的准则(如ENT和MAR)通常获得比基于代表性的准则(如CoreSet)更高的准确度,表明选择已经与源域对齐的目标域数据是低效的。当使用半监督求解器MME时,这些准则之间的性能差距变小。无论使用哪种策略,作者提出的LAS准则始终获得最好的分数,表明它可以选择更具信息量的目标样本。表2列出了使用10%预算时的结果。在使用微调或CDAC时,LAS的准确度优于其他主动选择准则。与最近的LAMDA方法相比,作者提出的LAS w/LAA作为整体方法提高了2.3%的准确度。


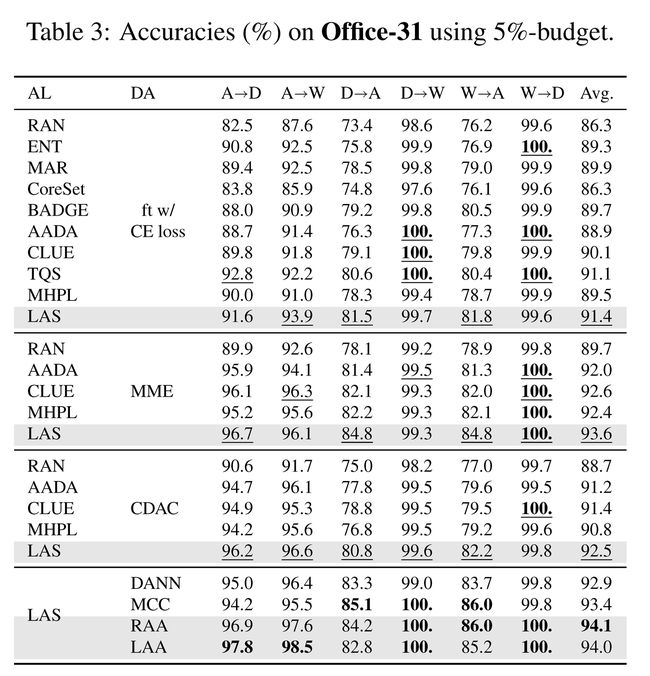
表3显示了在Office-31数据集上使用5%预算的结果。当模型更新方法固定为微调、MME或CDAC时,LAS始终优于其他主动选择准则。当主动选择方法固定为LAS时,作者提出的RAA和LAA始终优于MME、MCC和CDAC。表5列出了在VisDA数据集上使用10%预算的结果。LAS w/ LAA相比LAMDA提升了1.3%。

类分布偏移的数据集上ADA方法比较。源域和目标域之间类别分布不匹配在ADA中会导致一些问题。作者将本文方法与专门用于解决这个问题的LAMDA进行了比较。遵照他们的设置,作者使用了10%标记预算。表4、5列出了比较结果。LAMDA在源域数据上做重要性抽样以匹配源域和目标域的类别分布,这对于类似DANN的域对抗方法特别有用,本文的RAA/LAA属于自训练方法。作者使用类平衡拒绝机制来构造平衡的训练数据。给定LAS,RAA/LAA的准确度高于其他模型更新方法。LAS w/ LAA整体方法比LAMDA提高了1%。
3.2 LAS分析
LAS中不确定性度量。LAS使用LI(Local Inconsistency)分数来发现不确定区域。为了探究其特性,作者将LAS中的LI分数替换为其他不确定性度量方法,同时保持相同的多样性采样过程。比较的度量方法包括预测概率间隔、熵、预测置信度和NAU分数。图4a和图4b显示了不同过采样比例下的性能。
从图中可以看出,使用较大的过采样比例对于所有不确定性度量方法都是有益的,表明在不确定性和多样性之间需要平衡。CLUE和BADGE也是混合方法,但是它们与LAS有所不同。CLUE在所有目标域样本上运行基于熵加权距离的聚类,而BADGE在所有目标域样本上运行基于梯度嵌入的聚类。它们都依赖于整个目标域数据。


LAS相对于其他主动学习准则的优势。为了更好地展示LAS相对于其他主动学习准则的优势,图5绘制了在不同标记预算和领域自适应方法下的准确率。左图中,无论是使用微调还是MME,LAS始终得到了更好或相当的准确率。当标记预算较小时,性能提升更为显著。中间图绘制了使用5%预算的准确率曲线。LAS在整个训练过程中都优于其他准则。右图中,无论使用何种领域自适应策略,LAS都获得了最佳性能。

为了进一步分析这些不确定性度量之间的差异,图2可视化了Office-31 W→A数据集上的目标域数据特征。作者将所有不确定性分数归一化到[0,1],并根据分数对每个样本进行着色,其中分数最高的10%样本标记为黑色边框。熵和预测概率间隔不考虑局部上下文,因此它们往往包含一些孤立样本,如图2a和图2b所示。NAU定义为NAU = NP×NA,其中NP是邻居样本类别分布的熵,NA是样本与其邻居之间的平均相似性。由于邻居数有限,NP具有离散值且往往较小。如图2c和图2e所示,大多数目标域数据的NAU得分较小。相比之下,不确定样本往往具有较大的LI分数并且更加聚集,在LI的直方图中大约0.8位置可以观察到一个峰值。这也解释了为什么对于LI来说,多样性采样是重要的。在图3放大的可视化中,可以看出LI中的平滑操作有助于去除一些孤立样本。


3.3 RAA/LAA分析
类别平衡拒绝机制的效果。为了解决类别分布不一致的问题,作者在构建标记数据集A的时候通过对多数类和少数类不同的拒绝概率,有效地构造了类别平衡的训练集。图6可视化了 A 中每个类别的样本占比。可以看到,不使用拒绝机制时, A 由多数类主导。相比之下,使用了拒绝机制,来自少数类的样本比例增加。这有助于以更平衡的方式训练每个类别,体现在表6中逐类平均准确率有1.0%的提升。
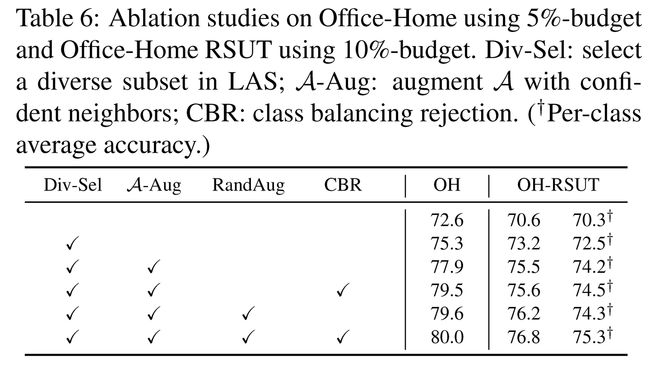


LADA组件消融实验。表6呈现了LADA各个组件的消融实验结果。第二行相较于第一行的改进表明在LAS中选择一个多样化子集至关重要。通过标记集增广,Office-Home上的准确率提高了2.6%,Office-Home RSUT上提高了2.3%。这证实了仅在查询数据上进行模型微调是相对低效的。使用RandAug构造混合图像进一步提升了性能。为了显示类平衡拒绝机制的有效性,作者在Office-Home RSUT上汇报了逐类平均准确率,从最后一行可以看到1.0%的提升。
04. 结论
本文提出利用查询数据的局部上下文进行主动领域自适应。作者首先提出了一种基于模型预测概率局部不一致性的局部上下文感知主动选择方法,相比之前的准则能选择更具信息量的样本。然后,作者提出了一个迭代标记数据增广模块,以解决标记预算较少导致的问题。它利用查询数据及其扩展邻域来更新模型参数,并维持类别平衡。充分的实验证明,本文的完整方法LADA(局部上下文感知主动领域自适应)显著优于现有最好的ADA方法。
作者:吕骋
关于TechBeat人工智能社区
▼
TechBeat(www.techbeat.net)隶属于将门创投,是一个荟聚全球华人AI精英的成长社区。
我们希望为AI人才打造更专业的服务和体验,加速并陪伴其学习成长。
期待这里可以成为你学习AI前沿知识的高地,分享自己最新工作的沃土,在AI进阶之路上的升级打怪的根据地!
更多详细介绍>>TechBeat,一个荟聚全球华人AI精英的学习成长社区