从零开始的机械臂yolov5抓取gazebo仿真(环境搭建篇中)
yolov5运行环境搭建
本篇主要讲如何搭建yolov5运行环境,以及一些需要注意避坑的重要知识点。anaconda与显卡驱动先装后装是没有什么影响的,关键在于,不能将显卡驱动以及cuda装在虚拟环境中。这里介绍一下博主的电脑环境为i7九代+ubuntu18.04+ros-melodic+gtx1660ti显卡,渣渣神舟笔记本。当然各位配置是越高越好哈,渣本训练个模型快要报废了。
显卡驱动以及cuda安装
在博主之前发的文章中有提到显卡驱动的安装方法:gazebo版本升级以及环境太暗的解决方法,然而这样的方法其实也有一些问题,那就是使用
sudo ubuntu-drivers autoinstall
自动下载命令下载的显卡驱动,是适配你显卡的最佳驱动,并不一定能够下载到你需要的驱动,最好的方式还是得手动安装。
避坑提醒!!!
一开始博主的显卡驱动为470对应安装的cuda版本为11.4,然而在使用gpu版pytorch基于yolov5训练模型时发现loss曲线呈一条直线,且无法训练模型,为解决该问题又跳了许多坑,网上也没有很好的解决方案,无奈博主只能重新安装显卡驱动以及cuda,卸载原先的cuda真的是一门技术活,给博主留下了难忘的回忆,希望各位能够及时避坑。
安装cuda10.2版本
为什么安装cuda10.2版本呢,因为该版本比较稳定且支持pytorch1.8,由显卡驱动与cuda版本对应表显卡驱动与cuda版本对应表中我们可以发现cuda10.2版本对应的显卡驱动为440且该驱动支持博主的gtx1660ti显卡。
接下去就是在官网下载对应的驱动以及cuda了,打开官网cuda各版本下载库,选择并点击cuda10.2版本
![]()
进入安装链接,依次选择你自己电脑对应的环境,博主的选择如下
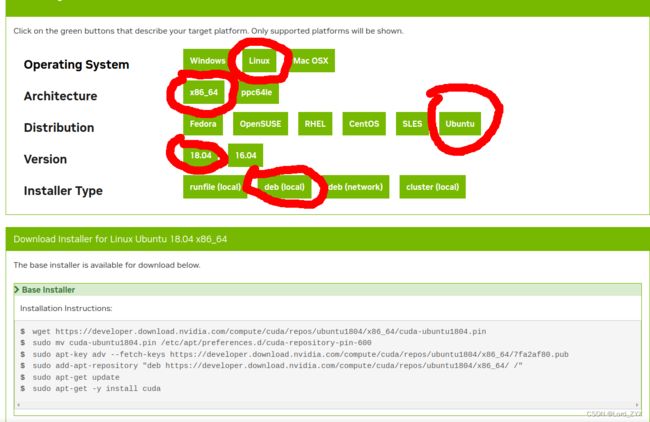
接着就出现了如下安装命令,依照如下命令安装即可。
wget https://developer.download.nvidia.com/compute/cuda/repos/ubuntu1804/x86_64/cuda-ubuntu1804.pin
sudo mv cuda-ubuntu1804.pin /etc/apt/preferences.d/cuda-repository-pin-600
wget https://developer.download.nvidia.com/compute/cuda/10.2/Prod/local_installers/cuda-repo-ubuntu1804-10-2-local-10.2.89-440.33.01_1.0-1_amd64.deb
sudo dpkg -i cuda-repo-ubuntu1804-10-2-local-10.2.89-440.33.01_1.0-1_amd64.deb
sudo apt-key add /var/cuda-repo-10-2-local-10.2.89-440.33.01/7fa2af80.pub
sudo apt-get update
sudo apt-get -y install cuda
安装完成后,打开终端,输入nvcc -V
出现如下显示,则说明cuda10.2安装完毕。

接着输入nvidia-smi,你会发现对应的显卡驱动也装好了。

安装完成后,还需将如下代码写进.bashrc文件中,并source .bashrc文件
export PATH=/usr/local/cuda-10.2/bin${PATH:+:${PATH}}
export LD_LIBRARY_PATH=/usr/local/cuda-10.2/lib64\
${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}

anaconda3环境配置
Anaconda 是一个用于科学计算的 Python 发行版,支持 Linux, Mac, Windows, 包含了众多流行的科学
计算、数据分析的 Python 包。安装anaconda是因为要将pytorch安装至conda环境中,因为ros-melodic默认使用的是python2.7,虽然可以将默认使用python改为3.6版本,但是这样一来,会对ros的正常使用造成影响,且conda可自由配置python环境,因此将pytorch安装在conda环境中是最为合理的方案。
其实anaconda安装配置这一块网上的教程不少,这块各位可以酌情参考。
安装anaconda
- 先去官方地址下载好对应的安装包(还有可去清华镜像站下载,具体可看参考文献部分)
下载地址:https://www.anaconda.com/download/#linux - 然后安装anaconda
bash ~/Downloads/Anaconda3-2021.05-Linux-x86_64.sh
anaconda会自动将环境变量添加到PATH里面,如果后面你发现输入conda提示没有该命令,那么
你需要执行命令 source ~/.bashrc 更新环境变量,就可以正常使用了。
如果发现这样还是没用,那么需要添加环境变量。
编辑~/.bashrc 文件,在最后面加上
export PATH=/home/bai/anaconda3/bin:$PATH
注意:路径应改为自己机器上的路径
保存退出后执行: source ~/.bashrc
再次输入 conda list 测试看看,应该没有问题。
添加anaconda国内镜像配置
清华TUNA提供了 Anaconda 仓库的镜像,运行以下三个命令:
conda config --add channels
https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/free/
conda config --add channels
https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main/
conda config --set show_channel_urls yes
创建conda虚拟环境
这里我创建了一个python3.8的虚拟环境,用于安装pytorch1.8以及适配yolov5-6.1版本
创建虚拟环境
conda create -n 虚拟环境的名字 python=3.8(python版本自己决定)
创建完后激活环境
conda activate 之前设定的虚拟环境的名字
关闭环境
conda deactivate 之前设定的虚拟环境的名字
下面是一些用于conda环境的命令
激活虚拟环境
conda activate 虚拟环境的名字
退出激活环境
conda deactivate
删除环境
conda renove -n 虚拟环境的名字 --all
查看当前所有的虚拟环境
conda env list
查看虚拟环境中下载的包
conda list
pytorch1.8安装
进入pytorch官网查看安装对应自身cuda的pytorch版本,pytorch官网https://pytorch.org/get-started/previous-versions/,找到cuda10.2对应的pytorch1.8版本

打开终端,激活conda环境
conda activate 虚拟环境的名字
输入pytorch1,8.0安装命令
conda install pytorch==1.8.0 torchvision==0.9.0 torchaudio==0.8.0 cudatoolkit=10.2 -c pytorch
安装完成后运行
python
import torch
print(torch.cuda.is_available())
若打印出True则说明安装成功

运行yolov5
博主的yolov5用的是6.1版本的,如果各位下载其它版本可能会导致博主的权重无法适配的情况,因此各位使用yolov5的版本尽量与博主保持一致。
首先进入github,找到yolov5-6.1分支,https://github.com/ultralytics/yolov5/tree/v6.1可以看到6.1版本的运行条件是:Clone repo and install requirements.txt in a Python>=3.7.0 environment, including PyTorch>=1.7.那目前的环境是正好符合的。
下载yolov5-6.1项目
git clone https://github.com/ultralytics/yolov5.git
或者也可以直接下载该分支的zip代码包
安装所需库
cd yolov5
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
注意:simple 不能少, 是 https 而不是 http,这里添加源用于提高下载速度
下载预训练权重文件
下载yolov5s.pt,yolov5m.pt,yolov5l.pt,yolov5x.pt权重文件,并放置在weights文件夹下,
https://github.com/ultralytics/yolov5/releases/tag/v6.1
进入上述网页找到assets栏下载权重。

安装测试
打开终端
cd yolov5
conda activate 虚拟环境的名字
python detect.py --source ./data/images/ --weights weights/yolov5s.pt
跑完测试会告知你测试结果保存的路径,这里路径为runs/detect/exp10
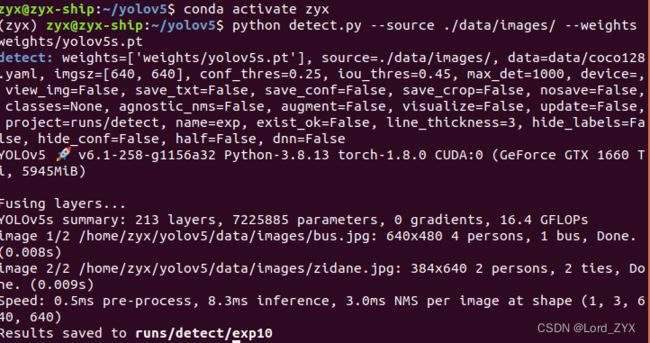
依据此路径查找到测试结果,如下图所示:

至此yolov5安装以及环境配置完毕。
补充
在新建的conda环境中,需要补充安装rospkg,要不然在运行yolov5_ros功能包的时候会报错。no model name rospkg.
pip install rospkg
小结
ros以及yolov5的环境已经配置完毕,各位可按照此教程进行配置,如有问题可在评论区提问。关于这块内容,博主也是踩过非常多的坑,也希望各位若遇到问题应当耐心将其解决。下一节,将对项目功能包进行介绍,并对代码开源。
参考资料
- Ubuntu18.04安装Anaconda(最新最全亲测图文并茂)
- yolov5-6.1,使用github镜像
- yolov5权重,使用github镜像
- gazebo版本升级以及环境太暗的解决方法