Ubuntu18.04配置ORB-SLAM3
文章目录
- 环境说明
- 必要配置
- 源码和库文件下载
-
- 1、ORB-SLAM3源码下载
- 2、Pangolin
- 3、Eigen3
- 4、Opencv
- 5、boost
- 6、EuRoc数据集(这部分只是测试使用,不打算测试可以跳过)
- 编译安装
-
- 1、Pangolin
- 3、Eigen3
- 4、Opencv
- 5、DBoW2 and g2o
- 6、boost
- 7、libssl-dev
- 8、ORB-SLAM3
- 数据集测试
- 参考链接
环境说明
使用:VMware Workstation Pro
虚拟机系统版本是:Ubuntu 18.04.06
虚拟机内存:8g(若为4g大小,很容易出现后文中ORB-SLAM3编译时会出现的内存问题)
虚拟机存储:50g(全部配置完成后大概25g左右,测试后为35g)
下载配置技巧:Ubuntu18.04安装vmware-tools解决无法复制粘贴和自由移动文件的问题
按照文章描述的内容完成安装后,可以在主机可以的情况下先下载好文件,而后挪入到虚拟机当中,有一定程度的便利
必要配置
打开终端,分别输入
sudo apt-get install git # 为了可以使用git指令
(这样才能在终端界面上使用如,git clone这样的指令)
sudo apt-get remove vim-common # 卸载旧版本vi编辑器
sudo apt-get install vim # 安装新版本的vi编辑器
sudo apt-get install build-essential # 安装g++和gcc
(为了避免如链接所描述的问题)
源码和库文件下载
这部分的内容需要进行下载,不一定需要下载的内容会有说明
1、ORB-SLAM3源码下载
git clone指令:
git clone https://github.com/UZ-SLAMLab/ORB_SLAM3.git
链接地址:ORB-SLAM3
2、Pangolin
git clone指令:
git clone https://github.com/stevenlovegrove/Pangolin.git
链接地址:Pangolin
3、Eigen3
git clone指令:
git clone https://github.com/eigenteam/eigen-git-mirror # github 有个mirror,版本3.3.4 from 2017
链接地址:Eigen3
4、Opencv
Opencv:下载Opencv3.4.3版本
https://opencv.org/releases/page/5/
ippicv库:电脑配置了并且可以进入外网,可以忽略这部分下载
https://github.com/opencv/opencv_3rdparty/blob/dfe3162c237af211e98b8960018b564bc209261d/ippicv/ippicv_2017u3_lnx_intel64_general_20170822.tgz
5、boost
链接地址:下载1.77.0版本的boost_1_77_0.tar.gz
https://www.boost.org/users/history/
6、EuRoc数据集(这部分只是测试使用,不打算测试可以跳过)
链接地址:选择ASL格式的V102
https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets#downloads
编译安装
1、Pangolin
安装依赖:
sudo apt install libgl1-mesa-dev
sudo apt install libglew-dev
sudo apt install cmake
sudo apt install libpython2.7-dev
sudo apt install pkg-config
sudo apt install libegl1-mesa-dev libwayland-dev libxkbcommon-dev wayland-protocols
编译安装:
cd Pangolin # 进入Pangolin文件夹
mkdir build # 创建Build文件夹
cd build # 进入build文件夹
cmake .. # 依照上级目录的CMakeLists.txt文件编译
cmake --build .
3、Eigen3
编译安装:
cd eigen-git-mirror
mkdir build
cd build
cmake ..
sudo make install
#安装后,头文件安装在/usr/local/include/eigen3/
4、Opencv
准备工作
1、修复error: unable to locate libjasper-dev 无法定位这个包libjasper-dev
输入:
sudo add-apt-repository "deb http://security.ubuntu.com/ubuntu xenial-security main"
sudo apt update
sudo apt install libjasper1 libjasper-dev
2、修复终端报错提示ippicv_2017u3_lnx_intel64_general_20170822.tgz的加速库下载失败
电脑配置了并且在开始编译的时候可以进入外网的同学,可以忽略这步
错误示例:

把OpenCV源文件中 /3rdparty/ippicv 文件夹下的 ippicv.cmake 中,
第47行的
"https://raw.githubusercontent.com/opencv/opencv_3rdparty/${IPPICV_COMMIT}/ippicv/"
改成你新下载的ippicv文件路径
更改示例:

更新依赖库:
sudo apt-get update
安装依赖:
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg-dev libtiff5-dev libswscale-dev libjasper-dev
# 原博客安装的是libtiff4-dev,运行过程报错,改成libtiff5-dev
编译安装:(跳过准备工作中的加速库配置的同学记得打开进入外网)
cd opencv-3.4.3
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
make -j4
sudo make install
配置环境:
1)添加库路径
sudo /bin/bash -c 'echo "/usr/local/lib" > /etc/ld.so.conf.d/opencv.conf'
2)更新系统库
sudo ldconfig
3)配置bash
sudo gedit /etc/bash.bashrc
在末尾添加如下两行代码
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
4)保存,执行如下指令使得配置生效
source /etc/bash.bashrc
5)更新
sudo updatedb
如果该指令报错,那么可能是没有安装mlocate
先执行安装命令
apt-get install mlocate
然后再
sudo updatedb
6)版本检测
pkg-config --modversion opencv
注意:如果执行后,显示找不到包。那么注意下载的OpenCV版本是不是3.版本的,OpenCV版本4以上的,默认不生成.pc文件,会出现找不到包的问题
输出如下,表示OpenCV完成了安装

5、DBoW2 and g2o
DBoW2主要用于回环检测,g2o(General Graph Optimization)主要用于图优化。
ORB-SLAM3的源码包自带DBoW2 and g2o,编译时会自动安装。不用管。
6、boost
对下载的文件进行解压后,进入文件夹,在此打开终端
分别执行:
sudo ./bootstrap.sh
sudo ./b2 install
需要一定时间,需要耐心等待
7、libssl-dev
执行
sudo apt-get install libssl-dev
8、ORB-SLAM3
准备工作:
打开ORB-SLAM3目录下的CMakeLists.txt,找到第33行
find_package(OpenCV 4.4)
将OpenCV版本号改为:
find_package(OpenCV 3.4)
编译:
cd ORB_SLAM3
chmod +x build.sh
./build.sh
可以直接执行上述命令,也可以在ORB-SLAM3目录下打开终端,
分块依次运行下述内容:(若是重新打开终端,记得注意当前的目录,在对应cd所至的目录下执行相对应的内容)
echo "Configuring and building Thirdparty/DBoW2 ..."
cd Thirdparty/DBoW2
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j4
cd ../../g2o
echo "Configuring and building Thirdparty/g2o ..."
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j4
cd ../../Sophus
echo "Configuring and building Thirdparty/Sophus ..."
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j4
前三块都在ORB-SLAM3目录下的Thirdparty文件夹中,
若是中断了,可以在对应文件夹里跳过cd执行剩余内容
cd ../../../
#此处在ORB-SLAM3的目录下
echo "Uncompress vocabulary ..."
cd Vocabulary
tar -xf ORBvoc.txt.tar.gz
cd ..
echo "Configuring and building ORB_SLAM3 ..."
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make
#此块内容最容易出错,且耗时长,我大概编译了四十分钟
必要说明:
将make改为make -j4会加快编译速度,但也会加大内存的占用,遇到问题:
Makefile:83: recipe for target 'all' failed
make: *** [all] Error 2
所以最后一块内容的编译是,make
使用make进行编译,内存占比在4g左右浮动,尽量需要虚拟机内存大于4g,这就是上文虚拟机内存选择8g的原因
编译成功示例如下:

最后一块内容里容易出现的错误:
错误一:

解决方法是打开对应的文件,如Tracking.cc, LoopClosing.cc等
在include后面添加以下代码:
namespace cv
{
template <typename _Tp, int m, int n>
static inline Matx<_Tp, m, n> operator/(const Matx<_Tp, m, n> &a, float alpha)
{
return Matx<_Tp, m, n>(a, 1.f / alpha, Matx_ScaleOp());
}
}
其他可参考的错误解决方案:
安装orbslam3时报错:error: no match for ‘operator/’
ORB-SLAM2编译错误_嵙杰的博客-CSDN博客
数据集测试
解压下载的数据集后(若该文件夹不名为V102,请改为V102),
V102文件夹里有一个mav0的文件夹,
还有可能出现的_MACOSX 文件夹(该文件夹是缓存垃圾,可以直接删除)
在ORB-SLAM3文件夹下创建文件夹dataset,将文件夹V102移入dataset
形成的目录结构如下
/ORB-SLAM3/dataset/V102/mav0
在ORB-SLAM3文件夹下打开终端,执行指令
./Examples/Monocular-Inertial/mono_inertial_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular-Inertial/EuRoC.yaml ./dataset/V102 ./Examples/Monocular-Inertial/EuRoC_TimeStamps/V102.txt dataset-V102_monoi
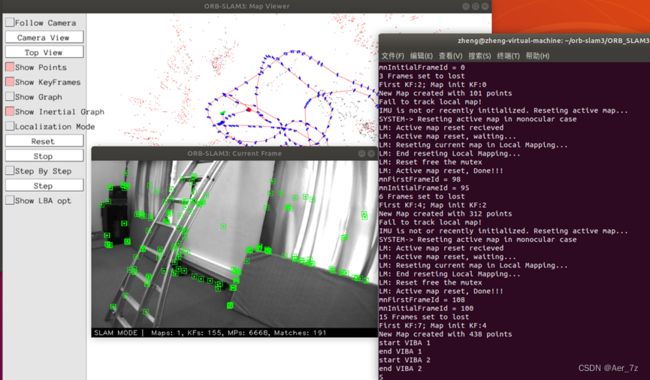
成功运行界面:
运行结束,若是显示如下内容

无须紧张,运行第二次后就消失了(原理我也不懂)
参考链接
ORB-SLAM3配置及安装教程(2023.3)
ORB-SLAM3配置安装及运行—Ubuntu20.04(2021年)
文章的很多内容有所缩减,只是为了配置安装,若是希望对细节有所了解,可以查看一下参考链接