android sensor架构和原理分析---转载做学习记录
原文地址请点击此处
本文主要描述了在android2.3平台G-sensor相关软硬件的体系架构和实现原理,按照Applications、Framework、HAL、Driver和Hardware五大层次分别介绍。
1.系统架构 (Architecture)
1.1 Android体系架构图

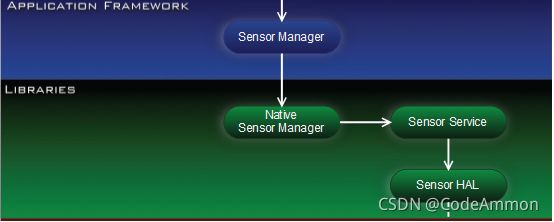
1.2 Sensor子系统架构图

· Application Framework
Sensor应用程序通过Sensor应用框架来获取sensor数据,应用框架层的Sensor Manager通过JNI与C++层进行通信。
· Sensor Libraries
Sensor中间层主要由Sensor Manager、Sensor service和Sensor硬件抽象层组成。
· Input Subsystem
通用的Linux输入框架专为与键盘、鼠标和触摸屏等输入设备而设计,并定义了一套标准事件集合。Sensor输入子系统采用采用了通用的Linux输入框架,它通过/sys/class/input节点和用户空间进行交互。
· Event Dev
Evdev提供了一种访问/dev/input/eventX输入设备事件的通用方法。
· AccelerometerDriver
此驱动通过SIRQ和I2C总线与MMA7660模组进行通信。SIRQ用来产生传感器事件中断。
2 应用 (Applications)
2.1 应用开发五步曲
(1) 获取传感器管理器对象;
mSensorManager =(SensorManager) getSystemService(SENSOR_SERVICE);
(2) 获取传感器对象;
mSensor = mSensorManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER);
(3) 定义事件监听器;
mEventListener =new SensorEventListener() {
@Override
publicvoid onSensorChanged(SensorEvent event) {
float[] values = event.values;
mTextView.setText("Accelerometer:" + values[0] +", "
+ values[1] +", " + values[2]);
}
@Override
publicvoidonAccuracyChanged(Sensor sensor,int accuracy) {
}
};
(4) 注册事件监听器;
protectedvoid onResume() {
super.onResume();
mSensorManager.registerListener(mEventListener, mSensor,
SensorManager.SENSOR_DELAY_NORMAL);
}
(5) 卸载事件监听器;
protectedvoid onPause() {
super.onPause();
mSensorManager.unregisterListener(mEventListener);
}
3 框架 (Framework)
3.1 工作模型
3.1.1 SensorManager的创建

nativeClassInit(): 初始化Native类信息;
sensors_module_init(): 创建Native SensorManager实例,从SensorService读取Sensor设备列表;
sensors_module_get_next_sensor(): 从SensorService读取下一个Sensor设备;
3.1.2 SensorThread数据接收处理
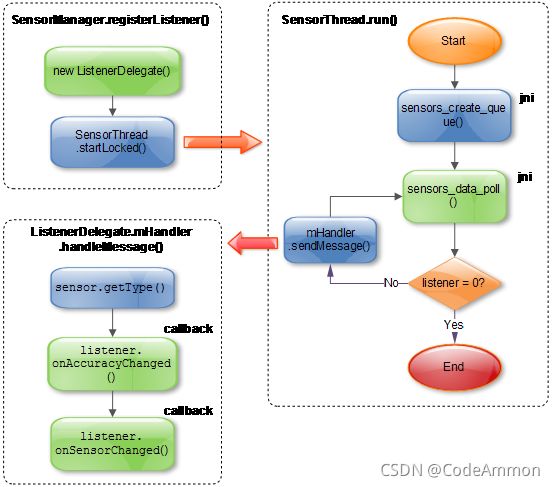
sensors_create_queue(): 创建和SensorService共享的消息队列;
sensors_data_poll(): 从消息队列中读取SensorService发过来的消息;
3.1.3 SensorService的工作原理
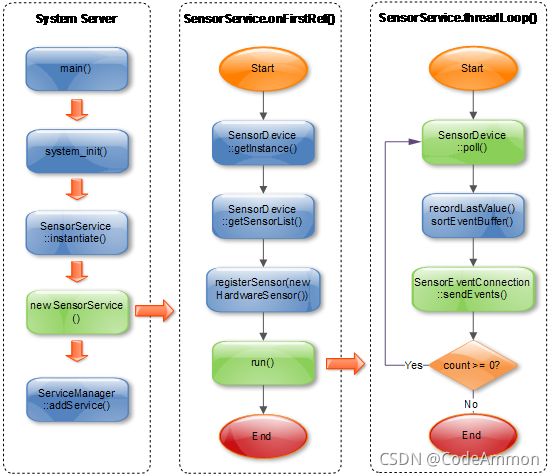
SensorDevice::poll(): 调用HAL接口读取数据;
SensorEventConnection::sendEvents(): 往消息队列中写入消息,SensorThread后续会读取该消息;
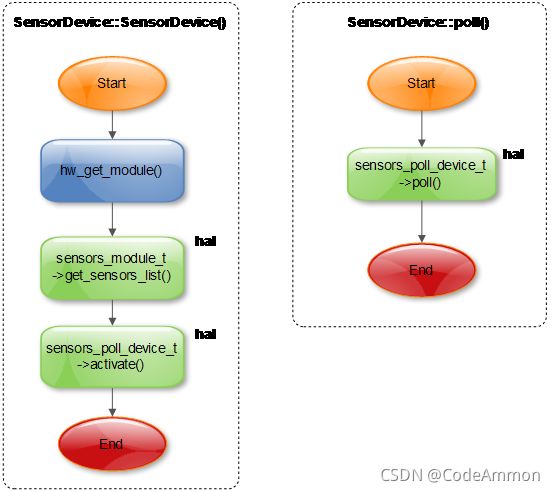
3.1.4 SensorDevice对HAL的访问
4 硬件抽象层 (HAL)

在linux操作系统中,应用同硬件之间的交互都是通过设备驱动来实现,Android系统为了降低应用开发人员开发难度,屏蔽硬件差异,定义出硬件抽象层,为开发人员提供获取各种设备相关的信息的接口。
4.1 Sensors HAL关键流程
4.1.1 打开Sensor设备

SensorBase ::openInput() : 打开input子系统的sensor消息文件句柄;
ioctl(EVIOCGABS(…)) : 获取ABS_X/ABS_Y/ABS_Z的加速度;
4.1.2 轮循Sensor事件

InputEventCircularReader::fill(): 调用read()从input子系统中读取事件放入环形缓冲区;
InputEventCircularReader::readEvent(): 从环形缓冲区中读取事件;
InputEventCircularReader::next(): 移动环形缓冲区当前指针;
5.2 Sensors HAL关键数据结构
5.2.1 sensors_module_t
struct sensors_module_t {
struct hw_module_t common;
/**
* Enumerate all available sensors. The list is returned in "list".
* @return number of sensors in the list
*/
int (*get_sensors_list)(struct sensors_module_t* module,
struct sensor_t const** list);
};
hw_get_module()会加载HAL模块,并返回HAL入口数据结构(hw_module_t)。HAL_MODULE_INFO_SYM默认是“HAL”,在hw_get_module中用dlsym获取。
const struct sensors_module_t HAL_MODULE_INFO_SYM = {
.common = {
.tag = HARDWARE_MODULE_TAG,
.version_major = 1,
.version_minor = 0,
.id = SENSORS_HARDWARE_MODULE_ID,
.name = "MMA7660 Sensors Module",
.author = "The Android Open Source Project",
.methods = &sensors_module_methods,
},
.get_sensors_list = sensors__get_sensors_list
};
5.2.2 hw_module_methods_t
static struct hw_module_methods_t sensors_module_methods = {
.open = open_sensors
};
5.2.3 sensors_poll_context_t
struct sensors_poll_context_t {
struct sensors_poll_device_t device; // must be first
sensors_poll_context_t();
~sensors_poll_context_t();
int activate(int handle, int enabled);
int setDelay(int handle, int64_t ns);
int pollEvents(sensors_event_t* data, int count);
int handleToDriver(int handle);
};
5.2.4 sensors_poll_device_t
struct sensors_poll_device_t {
struct hw_device_t common;
int (*activate)(struct sensors_poll_device_t *dev,
int handle, int enabled);
int (*setDelay)(struct sensors_poll_device_t *dev,
int handle, int64_t ns);
int (*poll)(struct sensors_poll_device_t *dev,
sensors_event_t* data, int count);
};
5.2.5 sensor_t:定义传感器的基本参数
static const struct sensor_t sSensorList[] = {
{ "MMA7660 3-axis Accelerometer",
"Freescale Semiconductor",
1, SENSORS_HANDLE_BASE+ID_A,
SENSOR_TYPE_ACCELEROMETER, 3.0f*9.81f, (3.0f*9.81f)/64.0f, 0.35f, 0, { } },
};
struct sensor_t {
const char* name;
const char* vendor;
int version;
int handle;
int type;
float maxRange;
float resolution;
float power;
int32_t minDelay;
void* reserved[8];
};
在学习中进步,如有错误,请多多批评指正