【数据结构】排序
目录
1.概念
2.常见排序算法的实现
2.1插入排序
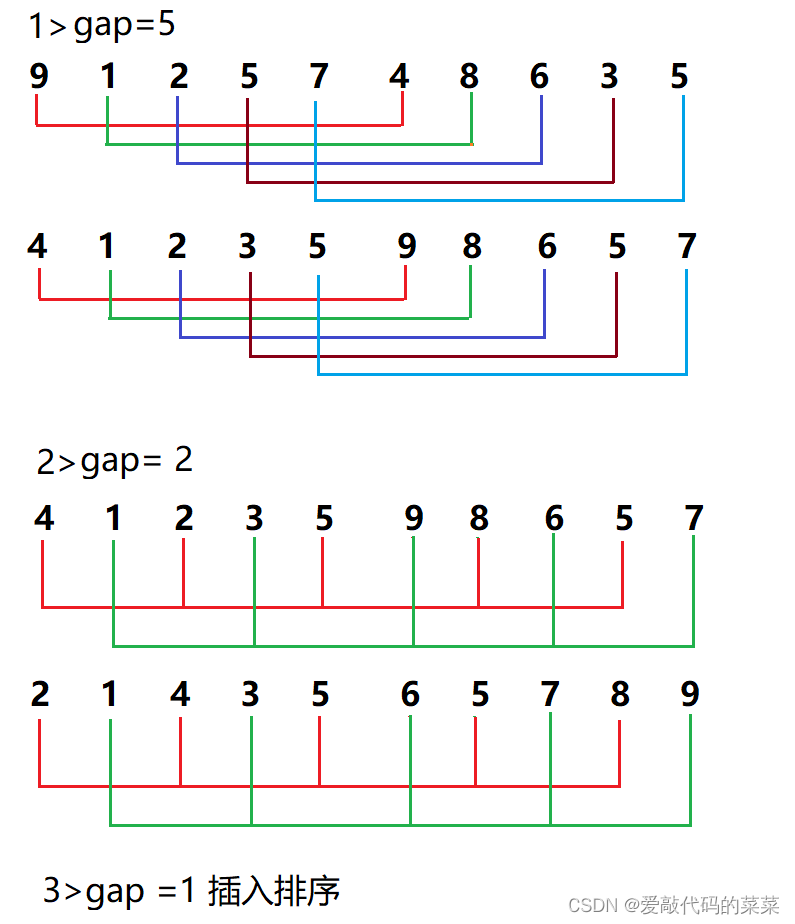
2.2希尔排序
2.3选择排序
2.4堆排序
2.5冒泡排序
2.5快速排序
2.5.1Hoare法
2.5.2挖坑法
2.5.3前后指针法
2.5.4三数取中法
2.5.5非递归实现快排
2.6归并排序
2.6.1递归实现
2.6.2非递归实现
2.7海量数据排序问题
3.其他非基于比较排序
3.1计数排序
3.2基数排序
3.3桶排序
4.总结
1.概念
所谓排序,就是使一串记录,按照其中的某个或某些关键字的大小,递增或递减的排列起来的操作
内部排序:数据元素全部放在内存中的排序.
外部排序:数据元素太多不能同时放在内存中,根据排序过程的要求不能在内外存之间移动数据的排序.
稳定性:排完序后相同元素是否是原有顺序。
例如:对 3 5 6 2 7 5 排序:
稳定: 2 3 5 5 6 7
不稳定:2 3 5 5 6 7
注意:一个本身就稳定的排序,可以实现为不稳定排序;
一个本身就不稳定的排序,不可能实现为稳定排序.

2.常见排序算法的实现
2.1插入排序
时间复杂度:O(N^2)
空间复杂度:O(1)
稳定性:稳定排序
public static void insertSort(int[] array) {
for (int i = 1; i < array.length; i++) {
int tmp = array[i];
int j = i - 1; //每一次循环j都指向i的前一个
for (; j >= 0 ; j--) {
if (array[j] > tmp) { //这里如果时array[j] >= tmp,就不是稳定排序
array[j+1] = array[j]; //也就是i和j交换
}
else {
break;
}
}
array[j+1] = tmp;
}
}2.2希尔排序
步骤:分组(缩小增量),组内进行插入排序
时间复杂度:不确定
空间复杂度:O(1)
稳定性:不稳定排序
public static void shell(int[] array,int gap) { //和插入排序十分相似
//区别在于所有1改为了gap
for (int i = gap; i < array.length; i++) { // 注意是i++不是i+gap,交替排序每个组
int tmp = array[i];
int j = i - gap;
for (; j >= 0 ; j -= gap) {
if (array[j] > tmp) {
array[j+gap] = array[j];
}
else {
break;
}
}
array[j+gap] = tmp;
}
}
public static void shellSort(int[] array) {
int gap = array.length;
while (gap > 1) {
gap /= 2;
shell(array,gap);
}
}2.3选择排序
步骤:一个一个排序,每次循环找到剩余元素中的最小元素放在前面。
时间复杂度:O(N^2)
空间复杂度:O(1)
稳定性:不稳定排序
public static void selectSort(int[] array) {
for (int i = 0; i < array.length; i++) {
int minIndex = array[i];
for (int j = i+1; j < array.length; j++) {
if (array[j] < minIndex) {
int tmp = minIndex;
minIndex = array[j];
array[j] = tmp;
}
}
array[i] = minIndex;
}
}2.4堆排序
时间复杂度:O(n*logn) 对数据不敏感,不管有序无序都是这个表达式.
空间复杂度:O(1)
稳定性:不稳定排序
private static void swap(int[] array,int i,int j) {
int tmp = array[i];
array[i] = array[j];
array[j] = tmp;
}
public static void heapSort(int[] array) {
createBigHeap(array); //创建一个大根堆
int end = array.length-1;
while (end > 0) {
swap(array,end,0);
siftDown(array,0,end);
end--;
}
}
private static void createBigHeap(int[] array) {
for (int i = (array.length-1-1) / 2; i >= 0 ; i--) {
siftDown(array,i,array.length);
}
}
private static void siftDown(int[] array,int parent,int len) {
int child = 2*parent+1;
while (child < len) {
if(child+1 < len && array[child] < array[child+1]) {
child++;
}
if(array[child] > array[parent]) {
swap(array,child,parent);
parent = child;
child = 2*parent+1;
}else {
break;
}
}
}2.5冒泡排序
时间复杂度:O(N^2) 对数据不敏感,不管有序无序都是这个表达式
空间复杂度:O(1)
稳定性:稳定排序
private static void swap(int[] array,int i,int j) {
int tmp = array[i];
array[i] = array[j];
array[j] = tmp;
}
public static void bubbleSort(int[] array) {
for (int i = 0; i < array.length-1; i++) {
boolean flg = false;
for (int j = 0; j < array.length-1-i; j++) {
if(array[j] > array[j+1]) {
swap(array,j,j+1);
flg = true;
}
}
if(!flg) { //当flag为假时break
break;
}
}
}2.5快速排序
基于分治法(分而治之)的一个排序算法。
时间复杂度:最好情况:O(n*logn)(记),最坏情况:O(n^2)
空间复杂度:最好情况:O(logn)(记),最坏情况:O(n)
稳定性:不稳定排序
2.5.1Hoare法
private static void swap(int[] array,int i,int j) {
int tmp = array[i];
array[i] = array[j];
array[j] = tmp;
}
private static int partition(int[] array,int left,int right) {
int i = left;
int tmp = array[left];
while (left < right) {
//找到右边小于tmp的值
while (left < right && array[right] >= tmp) {
right--;
}
//找到左边小于tmp的值
while (left < right && array[left] <= tmp) {
left++;
}
//交换这两个值
swap(array,left,right);
}
swap(array,left,i);//交换中值和第一个值
return left;//返回中值
}
private static void quick(int[] array,int start,int end) {
if (start >= end) {
return;
}
int pivot = partition(array,start,end);//找到中值
quick(array,start,pivot-1);//递归左边
quick(array,pivot+1,end);//递归右边
}
public static void quickSort(int[] array) {
quick(array,0,array.length-1);
}2.5.2挖坑法
类似于Hoare法,不过Hoare法是左右开弓双管齐下,挖坑法是左右分别来
private static void swap(int[] array,int i,int j) {
int tmp = array[i];
array[i] = array[j];
array[j] = tmp;
}
private static int partition(int[] array,int left,int right) {
int tmp = array[left];
while (left < right) {
while (left < right && array[right] >= tmp) {
right--;
}
array[left] = array[right];
while (left < right && array[left] <= tmp) {
left++;
}
array[right] = array[left];
}
array[left] = tmp;
return left;
}2.5.3前后指针法
有点难以理解,不经常用。这里只是把大于中值和小于中值的数分别放到两边,不是完整的代码。
private static int partition1(int[] array, int left, int right) {
int prev = left ;//后指针
int cur = left+1;//前指针
while (cur <= right) {
if(array[cur] < array[left] && array[++prev] != array[cur]) {
swap(array,cur,prev);
}
cur++;
}
swap(array,prev,left);
return prev;
}2.5.4三数取中法
这里也只是把大于中值和小于中值的数分别放到两边,不是完整的代码。
private static int threeNum(int[] array,int left,int right) {
int mid = (left+right) / 2;
if(array[left] < array[right]) {
if(array[mid] < array[left]) {
return left;
}else if(array[mid] > array[right]) {
return right;
}else {
return mid;
}
}else {
if(array[mid] < array[right]) {
return right;
}else if(array[mid] > array[left]) {
return left;
}else {
return mid;
}
}
}2.5.5非递归实现快排
public static void quickSort(int[] array) {
Stack stack = new Stack<>();//非递归使用栈
int start = 0;
int end = array.length-1;
if(end - start +1 <= 20) {
//数据太少直接插入排序
insertSort(array,start,end);
return;
}
//三数取中
int mid = threeNum(array,start,end);
//交换
swap(array,mid,start);
int pivot = partition(array,start,end);
if(pivot > start+1) { //pivot左边至少有两个元素
stack.push(start);
stack.push(pivot-1);
}
if(pivot < end-1) { //pivot右边至少有两个元素
stack.push(pivot+1);
stack.push(end);
}
while (!stack.empty()) {
end = stack.pop(); //注意先弹给end
start = stack.pop();
if(end - start +1 <= 20) {
//直接插入排序
insertSort(array,start,end);
}else {
//三数取中
mid = threeNum(array,start,end);
//交换
swap(array,mid,start);
pivot = partition(array, start, end);
if (pivot > start + 1) {
stack.push(start);
stack.push(pivot - 1);
}
if (pivot < end - 1) {
stack.push(pivot + 1);
stack.push(end);
}
}
}
} 2.6归并排序
步骤:分解+合并
时间复杂度:O(n logn)
空间复杂度:O(n)
稳定性:稳定排序
2.6.1递归实现
private static void merge(int[] array,int left,int mid,int right) {
int s1 = left;
int e1 = mid;
int s2 = mid+1;
int e2 = right;
int[] tmpArr = new int[right-left+1];//申请一个数组用来存合并后的数据
int k = 0;//tmpArr数组的下标
while (s1 <= e1 && s2 <= e2) { //说明左右树都有数据
if(array[s1] <= array[s2]){ //哪个小先放哪个
tmpArr[k++] = array[s1++];
}else {
tmpArr[k++] = array[s2++];
}
}
//走到这说明某一边走完了,将剩下一边全部放入tmpArr中
while (s1 <= e1) {
tmpArr[k++] = array[s1++];
}
while (s2 <= e2) {
tmpArr[k++] = array[s2++];
}
//将tmpArr数组再拷入原数组中
for (int i = 0; i < k; i++) {
array[i+left] = tmpArr[i];
}
}
private static void mergeSortFunc(int[] array,int left,int right) {
if(left >= right) {
return;
}
int mid = (left+right) / 2;
//分解
mergeSortFunc(array,left,mid);//递归左边
mergeSortFunc(array,mid+1,right);//递归右边
merge(array,left,mid,right);//合并
}
public static void mergeSort(int[] array) {
mergeSortFunc(array,0,array.length-1);
}2.6.2非递归实现
public static void mergeSort1(int[] array) {
int gap = 1;
while (gap < array.length) {
for (int i = 0; i < array.length; i = i + gap*2) {
int left = i;
int mid = left+gap-1;
int right = mid+gap;
//mid和right有可能会越界
if(mid >= array.length) {
mid = array.length-1;
}
if(right >= array.length) {
right = array.length-1;
}
merge(array,left,mid,right);//合并
}
gap *= 2;
}
}2.7海量数据排序问题
前提:内存只有1G,而需要排序的内容有100G,此时需要再磁盘等外部存储进行排序。
归并排序是最常见的外部排序。
步骤:1> 先把文件切分成 200 份,每份512M;
2>分别对每份512M排序;
3> 进行二路归并,再对 200 份有序文件做归并过程。
3.其他非基于比较排序
3.1计数排序
适用于比较集中的数据,空间换时间。
时间复杂度:O(范围+n),范围越小,复杂度越小。
空间复杂度:O(范围)
稳定性:稳定排序
public static void countArray(int[] array) {
//找到数组中的最大值和最小值
int maxVal = array[0];
int minVal = array[0];
for (int i = 1; i < array.length; i++) {
if (array[i] > maxVal) {
maxVal = array[i];
}
if (array[i] < minVal) {
minVal = array[i];
}
}
//将array中每个元素的个数存入计数数组count中
int range = maxVal - minVal + 1; //确定计数数组大小
int[] count = new int[range];
for (int i = 0; i < array.length; i++) {
int val = array[i];
count[val-minVal]++;
}
//遍历计数数组,打印排完序的结果
int index = 0; //原数组的下标
for (int i = 0; i < count.length; i++) {
int val = count[i];
while (val-- != 0) { //val为0不进入循环
array[index] = i + minVal;//覆盖原数组
index++;
}
}
}3.2基数排序
基数排序
3.3桶排序
桶排序
类似于基数排序,只不过是在桶里直接进行排序。
4.总结
| 排序 | 时间复杂度 | 空间复杂度 | 稳定性 |
|---|---|---|---|
| 插入 | n^2 | 1 | √ |
| 希尔 | n^1.3~n^1.5 | 1 | × |
| 选择 | n^2 | 1 | × |
| 堆 | nlogn | 1 | × |
| 冒泡 | n^2 | 1 | √ |
| 快速 | nlogn / n^2 | logn / n | × |
| 归并 | nlogn | n | √ |
| 计数 | 范围+n | 范围 | √ |
这篇博客真的是知识量巨大啊(![]()