RT-Thread I/O设备模型(二)
访问I/O设备
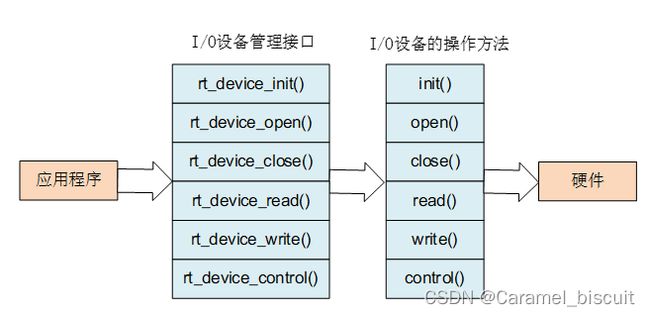
应用程序通过I/O设备管理接口来访问硬件设备,当设备驱动程序实现后,应用程序就可以访问该硬件。I/O设备管理接口与I/O设备的操作方法映射关系如下:
查找设备
应用程序根据设备名称获取设备句柄,进而操作设备。
rt_device_t rt_device_find(const char* name);
初始化设备
获得设备句柄后,应用程序可对设备进行初始化操作。
rt_err_t rt_device_init(rt_device_t dev);
当一个设备已经初始化成功后,调用这个接口将不再重复初始化。
打开和关闭设备
通过设备句柄,应用程序可以打开和关闭设备,打开设备时,会检测设备是否已经初始化,没有初始化会默认调用初始化接口初始化设备。
rt_err_t rt_device_open(rt_device_t dev, rt_uint16_t oflags);
- dev:设备句柄。
- oflags:设备打开模式。
- RT_EOK:设备打开成功。
- -RT_EBUSY:如果设备注册时指定的参数中包括RT_DEVICE_FLAG_STANDALONE参数,此设备将不允许重复打开。
#define RT_DEVICE_OFLAG_CLOSE 0x000 /* 设备已经关闭(内部使用)*/
#define RT_DEVICE_OFLAG_RDONLY 0x001 /* 以只读方式打开设备 */
#define RT_DEVICE_OFLAG_WRONLY 0x002 /* 以只写方式打开设备 */
#define RT_DEVICE_OFLAG_RDWR 0x003 /* 以读写方式打开设备 */
#define RT_DEVICE_OFLAG_OPEN 0x008 /* 设备已经打开(内部使用)*/
#define RT_DEVICE_FLAG_STREAM 0x040 /* 设备以流模式打开 */
#define RT_DEVICE_FLAG_INT_RX 0x100 /* 设备以中断接收模式打开 */
#define RT_DEVICE_FLAG_DMA_RX 0x200 /* 设备以 DMA 接收模式打开 */
#define RT_DEVICE_FLAG_INT_TX 0x400 /* 设备以中断发送模式打开 */
#define RT_DEVICE_FLAG_DMA_TX 0x800 /* 设备以 DMA 发送模式打开 */
如果上层应用程序需要设置设备的接收回调函数,则必须以RT_DEVICE_FLAG_INT_RX或者RT_DEVICE_FLAG_DMA_RX的方式打开设备,否则不会回调函数。
应用程序打开设备完成读写等操作后,如果不需要再对设备进行操作则可以关闭设备,通过如下函数完成:
rt_err_t rt_device_close(rt_device_t dev);
关闭设备接口和打开设备接口需配对使用,打开一次设备对应要关闭一次设备,这样设备才能够完全被关闭,否则设备仍处于未关闭状态。
控制设备
通过命令控制字,应用程序也可以对设备进行控制,通过如下函数完成:
rt_err_t rt_device_control(rt_device_t dev, rt_uint8_t cmd, void* arg);
- cmd:命令控制字,这个参数通常与设备驱动程序相关。
- arg:控制的参数。
#define RT_DEVICE_CTRL_RESUME 0x01 /* 恢复设备 */
#define RT_DEVICE_CTRL_SUSPEND 0x02 /* 挂起设备 */
#define RT_DEVICE_CTRL_CONFIG 0x03 /* 配置设备 */
#define RT_DEVICE_CTRL_SET_INT 0x10 /* 设置中断 */
#define RT_DEVICE_CTRL_CLR_INT 0x11 /* 清中断 */
#define RT_DEVICE_CTRL_GET_INT 0x12 /* 获取中断状态 */
数据收发回调
当硬件设备接收到数据时,可以通过函数回调另一个函数来设置数据接收指示,通知上层应用线程有数据到达。
rt_err_t rt_device_set_rx_indicate(rt_device_t dev, rt_err_t (*rx_ind)(rt_device_t dev,rt_size_t size));
rx_ind:回调函数指针
该函数的回调参数由调用者提供。当硬件设备接收到数据时,会回调这个函数,并把收到的数据长度放在size参数中传递给上层应用。上层应用线程在收到指示后,立刻从设备中读取数据。
在应用程序调用 rt_device_write() 写入数据时,如果底层硬件能够支持自动发送,那么上层应用可以设置一个回调函数。这个回调函数会在底层硬件数据发送完成后 (例如 DMA 传送完成或 FIFO 已经写入完毕产生完成中断时) 调用。可以通过如下函数设置设备发送完成指示,函数参数及返回值见:
rt_err_t rt_device_set_tx_complete(rt_device_t dev, rt_err_t (*tx_done)(rt_device_t dev,void *buffer));
调用这个函数时,回调函数由调用者提供,当硬件设备发送完数据时,由驱动程序回调这个函数并把发送完成的数据块地址 buffer 作为参数传递给上层应用。上层应用(线程)在收到指示时会根据发送 buffer 的情况,释放 buffer 内存块或将其作为下一个写数据的缓存。
设备访问示例
#include I/O设备框架补充图

图中各类里的.c文件是各类对应的管理接口所在,比如设备基类rt_device的管理接口在device.c中。
图中设备驱动框架层有很多RT-Thread写好的类,图中只列出2类,其它类用“xxx”来表示,这些省略的类及其管理接口可以在conponents/drivers目录下找寻。
设备驱动层的“xxx”,是RT-Thread支持的各BSP平台,在源码的src/bsp目录下找寻,