【FreeRTOS】中断管理
❤️作者主页:凉开水白菜
❤️作者简介:共同学习,互相监督,热于分享,多加讨论,一起进步!
❤️专栏资料:https://pan.baidu.com/s/1nc1rfyLiMyw6ZhxiZ1Cumg?pwd=free
❤️点赞 收藏 ⭐再看,养成习惯
订阅的粉丝可通过PC端左侧加我微信,可对文章的内容进行一对一答疑!
文章目录
- 前言
-
- 中断和任务的API区别
- 为什么需要任务切换?
- 如何进行任务切换?
- 使用CubeMX创建工程
-
- 配置时钟
- 配置调试模式
- 配置串口
- 配置按键外部中断;
- 配置中断服务函数
- 配置按键触发模式
- 配置FreeRTOS
- 配置时钟
- 生成工程
- 示例
-
- 外部中断按键(任务通知的中断使用)
- 串口接收中断(队列的中断使用)
- 结尾
前言
前面的章节多数的API使用都讲到中断专用和任务专用是分开的,为什么FreeRTOS会设计两套api函数呢?他们又有那些区别?
中断和任务的API区别
在任务中因为我们是多线程设计的模式可以允许任务阻塞等待,但是在中断中我们希望越快处理越好,我们可以来看看两套API函数的原形都有那些区别;
xQueueSend( xQueue, pvItemToQueue, xTicksToWait )
xQueueSendFromISR( xQueue, pvItemToQueue, pxHigherPriorityTaskWoken )
如果查看其他的API使用函数我们可以发现在中断使用的API只是在任务API的末尾添加了FromISR,参数从xTicksToWait等待时间换成了pxHigherPriorityTaskWoken;
任务等待时间我们已经很清楚了我们只需要了解pxHigherPriorityTaskWoken参数,pxHigherPriorityTaskWoken就是用来保存函数的结果:是否需要切换任务
pdTRUE:函数的操作导致更高优先级的任务就绪了,ISR应该进行任务切换
pdFALSE:没有进行任务切换的必要
为什么需要任务切换?
当我们中断频繁触发的时候就会造成我们的任务频繁切换,这样会浪费较多的资源效率较慢,所以可以使用xHigherPriorityTaskWoken避免不必要的任务切换提高效率,简单来说就是将任务切换变为可控提高效率;
如何进行任务切换?
FreeRTOS的ISR函数中,使用两个宏进行任务切换:
portEND_SWITCHING_ISR( xHigherPriorityTaskWoken );
portYIELD_FROM_ISR( xHigherPriorityTaskWoken );
这两个宏做的事情是完全一样的,在老版本的FreeRTOS中,
portEND_SWITCHING_ISR使用汇编实现
portYIELD_FROM_ISR使用C语言实现
新版本都统一使用portYIELD_FROM_ISR。
使用CubeMX创建工程
先前的使用代码移植的方法来创建我们的工程其实CubeMX是可以直接帮我们生成FreeRTOS工程的;
配置时钟

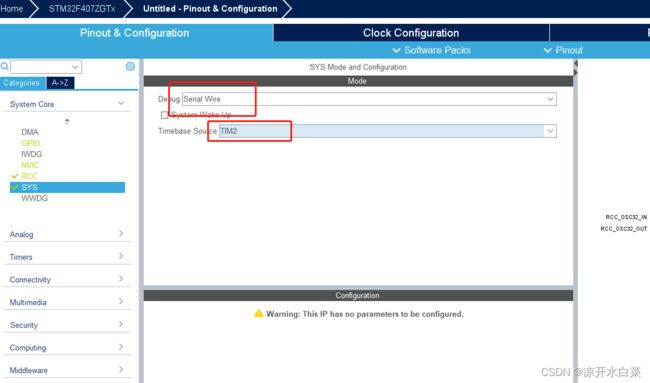
配置调试模式
这里必须选择否则有可能出现下载程序的问题,这里的基准时钟我们不能选择滴答时钟因为我们的FreeRTOS会使用我们的滴答时钟作为任务切换;
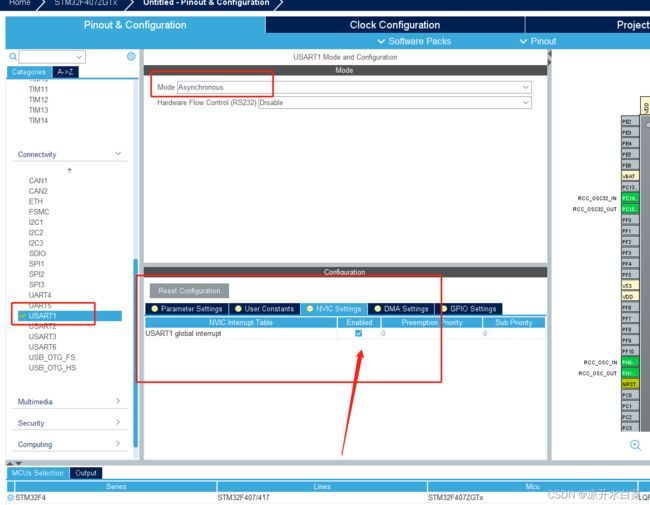
配置串口
后面我们做队列实验就拿串口1来做实验
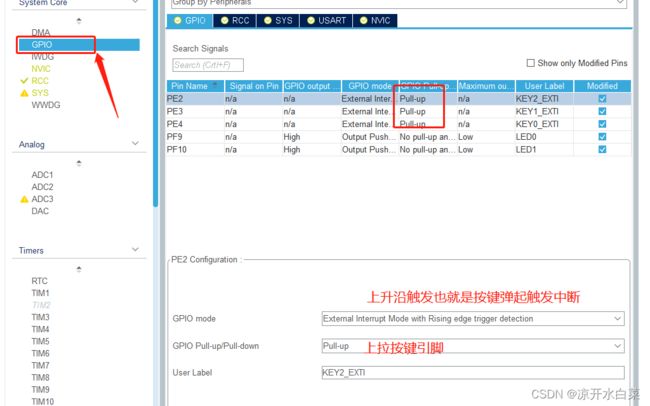
配置按键外部中断;

配置中断服务函数

配置按键触发模式
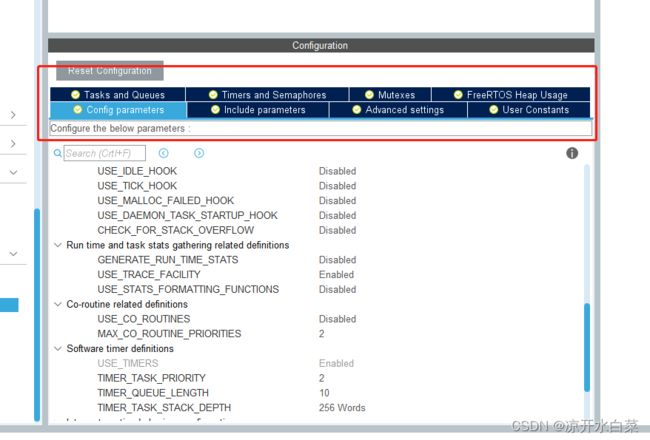
配置FreeRTOS
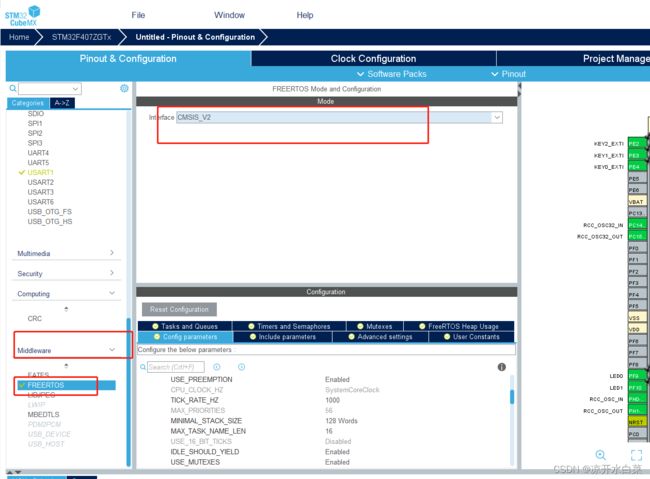
这里我选择默认配置即可,如果前面的文章看了的话这里面的选项还是比较熟悉的
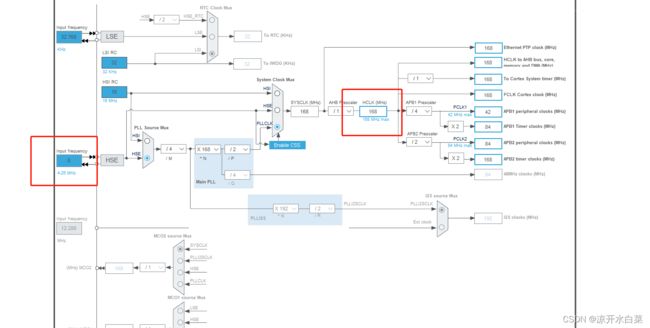
配置时钟
这里的8是这块板子的晶振,根据自己硬件实际情况选择即可
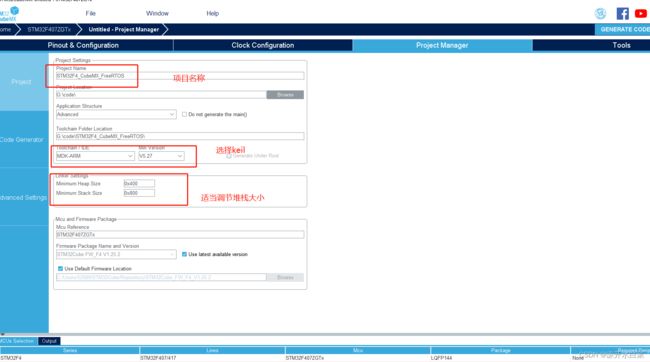
生成工程
库文件单独分析.c/.h

添加串口printf支持
/* USER CODE BEGIN Includes */
#include 示例
虽然FreeRTOS被重新封装了但是API基本都没有改变我们还是可以使用之前那一套即可;可以看到这里的内核启动是在while之前的所以我们的代码要卸载begin2的位置
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */

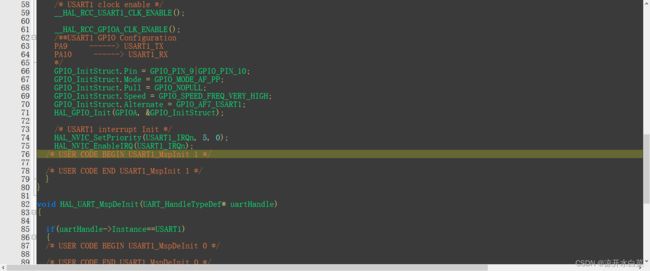
需要注意的是我们的外设的中断配置优先级不要超过5,否则可能会在中断中卡死;

队列、信号量、互斥量、事件组、任务通知的使用方法和下面的类似;
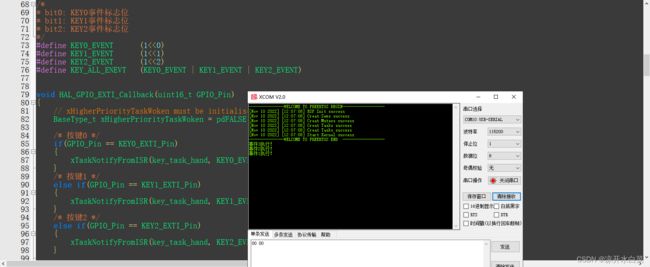
外部中断按键(任务通知的中断使用)
外部中断服务函数,这个需要我们自己实现__weak()
/**
* @brief EXTI line detection callbacks.
* @param GPIO_Pin Specifies the pins connected EXTI line
* @retval None
*/
__weak void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(GPIO_Pin);
/* NOTE: This function Should not be modified, when the callback is needed,
the HAL_GPIO_EXTI_Callback could be implemented in the user file
*/
}
编译如果出现:“Error: L6218E: Undefined symbol xEventGroupSetBitsFromISR (referred from main.o).”
解决办法:INCLUDE_xTimerPendFunctionCall must be set to 1 to make the xEventGroupSetBitFromISR() function availabl 搜索 INCLUDE_xTimerPendFunctionCall 把它设置为1
完整main.c代码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* © Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software component is licensed by ST under Ultimate Liberty license
* SLA0044, the "License"; You may not use this file except in compliance with
* the License. You may obtain a copy of the License at:
* www.st.com/SLA0044
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "cmsis_os.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include 实验效果:按下按键情况
串口接收中断(队列的中断使用)
实验目的:将串口接收到得数据打印出来,根据指令控制LED
完整main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* © Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software component is licensed by ST under Ultimate Liberty license
* SLA0044, the "License"; You may not use this file except in compliance with
* the License. You may obtain a copy of the License at:
* www.st.com/SLA0044
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "cmsis_os.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include 实验现象

结尾
我是凉开水白菜,我们下文见~