Nerf 训练自有数据
1. 拍摄序列图像,放置在文件夹,如duck/images

2. 使用colmap使用COLMAP获取相机位姿
(1)参考官方文档安装colmap;
(2)使用win 可执行程序

(3)点击【File】选择【new project】
点击【New】在duck目录,创建databas
点击【Select】,目录设置为duck/images
点击【Save】

(4) 点击【Processing】 选择【Feature extraction】
设置相机模型为SIMPLE_PINHOLE,点击【Extraction】;

(5) 点击【Processing】 选择【Feature matching】
点击【Run】;

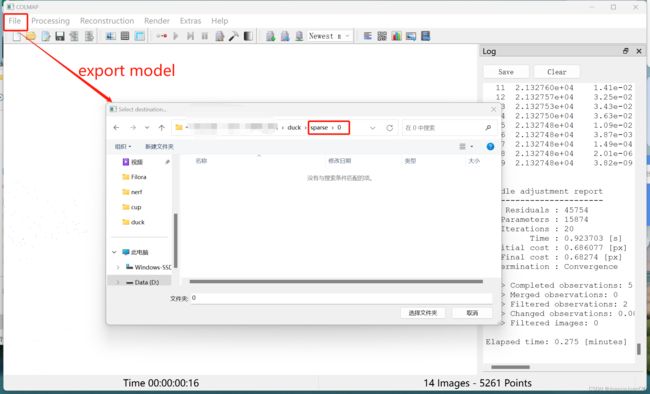
(6)点击【Reconstruction】 选择【Start reconstruction】进行重建;

(6)
点击【File】选择【Export model】,导出模型,请在工作目录下新建/sparse/0/文件夹,模型保存在该目录下
3. 格式转换为llff
使用LLFF脚本对位姿数据进行格式转化;
LLFF格式数据可以将对应图片参数、相机位姿和相机参数简洁有效地存储在一个npy文件中,以方便python读取,且NeRF模型源码拥有直接对LLFF格式数据集进行训练的配置和模块,便于研究者使用。
git clone https://github.com/Fyusion/LLFF.git
conda create -n llff python=3.8
conda activate llff
pip install numpy imageio scikit-image -i https://pypi.mirrors.ustc.edu.cn/simple
转换命令:
python imgs2poses.py /mnt/d/project/test_code/nerf/NeRF_Data/duck/
打印信息:
Don't need to run COLMAP
Post-colmap
Cameras 5
Images # 14
Points (5259, 3) Visibility (5259, 14)
Depth stats 5.581121967700646 196.77453829936374 15.227148415751047
Done with imgs2poses
转换完成:

4. Nerf 训练配置
- 将整个工作目录的文件夹(即duck文件夹)上传至nerf代码的/nerf-pytorch/data/nerf_llff_data/目录下;
- 创建nerf-pytorch/configs/duck.txt
expname = duck_test
basedir = ./logs
datadir = ./data/nerf_llff_data/duck
dataset_type = llff
factor = 8
llffhold = 8
N_rand = 1024
N_samples = 64
N_importance = 64
use_viewdirs = True
raw_noise_std = 1e0
- 训练
python run_nerf.py --config configs/duck.txt
训练结果保存在nerf-pytorch/logs/duck_test