【运动规划算法项目实战】专栏介绍
文章目录
- 前言
- 1. 路径规划中常用的插值方法
- 2. 路径规划中常用的抽稀算法
- 3. 如何加载csv文件的路径信息
- 4. 如何在栅格地图中实现A*算法
- 5. 如何在栅格地图中实现Dijkstra算法
- 6. 如何实现简单的状态机
- 7. 如何实现机器人多目标点导航
- 8. Voronoi图
- 9. 八叉树地图
- 10. 如何实现三次样条插值
- 11. 如何利用AABB作碰撞检测
- 12. 如何使用分离轴定理算法实现碰撞检测
- 13. 如何实现Dubins曲线和Reeds-Shepp曲线
- 14. 如何使用Apollo Math模块实现碰撞检测
- 15. 如何生成运动物体的预测轨迹
- 16. Fast-Tracker代码分析
- 17. 如何使用Pure Pursuit算法进行路径跟踪
- 18. 如何使用MPC算法进行路径跟踪
- 19. 基于梯度的轨迹优化算法GTOP
- 20. 基于采样的路径搜索算法
- 21. 如何构建欧几里德符号距离场
- 22. Dynamic Window Approach算法
- 23. Artificial Potential Field算法
- 24. Time-Elastic-Band算法
前言
本博客专栏将介绍一系列机器人运动规划算法项目实战,以及如何在Gazebo仿真环境下进行实验验证。我们将提供可运行的代码和详细的算法解析,以帮助读者更好地理解和应用这些算法。
通过本专栏的学习,读者将深入了解机器人运动规划算法的原理和实现,以及如何在仿真环境下进行验证和调试。无论是对机器人运动规划算法感兴趣的学生、研究者,还是希望在工业和服务机器人领域应用这些算法的工程师和开发者,都能从本专栏中受益。
1. 路径规划中常用的插值方法
【运动规划算法项目实战】路径规划中常用的插值方法(附ROS C++代码)
对常见用于处理路径平滑的插值算法主要包括线性插值、三次样条插值、B样条插值和贝塞尔曲线插值等,分别进行介绍、优缺点和使用场景。
【运动规划算法】三次样条曲线
2. 路径规划中常用的抽稀算法
【运动规划算法项目实战】路径规划中常用的抽稀算法(附ROS C++代码)
抽稀(Simplification)算法是指在保持数据尽可能不失真的前提下,对数据进行精简处理,减少数据的数量,便于数据的存储和处理。路径规划中,抽稀算法的作用是将原始路径中的冗余点去除,从而减小路径点的数量,降低计算量和存储量,同时保留路径的形状特征和轨迹信息,确保路径规划的精度和实时性。常见的抽稀算法有 Douglas-Peucker算法和垂距限值法。本篇文章会对两种算法原理继续介绍,并提供代码实现。

3. 如何加载csv文件的路径信息
【运动规划算法项目实战】如何加载csv文件的路径信息(附ROS C++代码)
在运动规划算法项目中,路径规划是非常重要的一环。在实际应用中,我们通常需要将预先规划好的路径以某种方式加载到程序中进行后续处理和运动控制。而CSV文件作为一种常见的数据交换格式,也被广泛用于存储路径信息。因此,学会如何加载CSV文件中的路径信息将是非常有帮助的。在ROS中,我们可以使用C++和Python等多种编程语言来加载CSV文件。其中,C++作为ROS的主要开发语言,具有良好的性能和稳定性,更适合在实际应用中使用。本文将以ROS C++为例,介绍如何加载CSV文件中的路径信息。

4. 如何在栅格地图中实现A*算法
【运动规划算法项目实战】如何在栅格地图中实现A*算法(附ROS C++代码)
在机器人的路径规划中,栅格地图常常被用于描述环境的空间布局。A*算法是一种基于栅格地图的搜索算法,用于寻找两个点之间最短路径。
【运动规划算法】A* 算法
5. 如何在栅格地图中实现Dijkstra算法
【运动规划算法项目实战】如何在栅格地图中实现Dijkstra算法(附ROS C++代码)
Dijkstra算法是一种用于图中单源最短路径的贪心算法。在计算机科学和网络设计中广泛应用。该算法从起点开始,通过优先选择距离起点最近的未标记节点来逐步扩展最短路径树。它最终确定到所有节点的最短路径。
【运动规划算法】Dijkstra算法
6. 如何实现简单的状态机
【运动规划算法项目实战】如何实现简单的状态机(附ROS C++代码)
状态机是一种表示机器人状态转移的形式化模型,它由一组状态和一组转移函数组成。在机器人中,状态可以表示机器人的状态,例如运动状态、感知状态、控制状态等。转移函数则表示机器人在不同状态之间的转移,可以是手动定义的,也可以是根据规则自动产生的。
7. 如何实现机器人多目标点导航
【运动规划算法项目实战】如何实现机器人多目标点导航(附ROS C++代码)
在ROS机器人应用中,实现机器人多目标点导航是非常常见的需求。本文将介绍如何使用ROS和actionlib来实现机器人的多目标点导航,目标点信息将被记录在YAML文件中。我们可以通过使用MoveBaseAction来实现机器人的导航功能。MoveBaseAction是一个ROS中的action类型,它提供了控制机器人到达目标点的API。它可以接收由ROS节点发布的目标点,并为机器人提供适当的控制以达到目标点。在本文中,我们将使用actionlib库来实现MoveBaseAction的客户端。
8. Voronoi图
【运动规划算法项目实战】Voronoi图
Voronoi图,也称为Dirichlet图,是计算几何学和图形计算中的一个重要概念。它是根据一组点将空间分割成一些区域的方法,其中每个区域都包含一个最近的点。这个概念可以应用于许多领域,如机器人路径规划、计算机视觉、地图制作等等。本文将介绍Voronoi图的概念、性质和应用,并对如何实现Voronoi图进行讨论。
【stage仿真】多机协同
9. 八叉树地图
【运动规划算法项目实战】八叉树地图(附ROS C++代码)
八叉树地图(Octomap)是一种使用八叉树数据结构来表示三维空间物体和环境信息的开源软件,可以高效地处理和存储传感器数据,并生成高分辨率的三维地图。在机器人领域中,Octomap在ROS中被广泛应用于感知、路径规划和导航等任务中。本文将介绍Octomap的基本原理、优点和缺点、应用场景以及使用方法,以帮助读者更好地了解和应用这一技术。
【建图】八叉树建图
10. 如何实现三次样条插值
【运动规划算法项目实战】如何实现三次样条插值(附ROS C++代码)
三次样条插值是一种广泛应用于数据拟合和插值的方法。它通过使用三次多项式在给定的一组数据点之间进行插值,以实现平滑的拟合效果。三次样条插值的优点是可以平滑地拟合给定的数据点,而不会产生震荡或振荡现象。三次样条插值是机器人路径规划中常用的一种插值方法。在机器人运动规划中,路径通常是由多个路径点组成的。路径点之间的连接需要一个平滑的轨迹,以便机器人能够流畅地移动。三次样条插值可以用于在路径点之间生成连续的轨迹。本文将介绍三次样条插值的原理、优缺点、应用场景以及ROS代码的实现,希望能够帮助读者更好地理解和应用该方法。
【运动规划算法】三次样条曲线
11. 如何利用AABB作碰撞检测
【运动规划算法项目实战】如何利用AABB作碰撞检测(附ROS C++代码)
AABB碰撞检测是一种基于包围盒的简单、快速和有效的碰撞检测方法,被广泛应用于各种计算机图形学和物理仿真系统中。其基本思想是将物体或场景中的复杂几何形状简化为简单的矩形包围盒,然后判断两个包围盒之间是否存在重叠,以确定它们是否碰撞。AABB碰撞检测之所以受到广泛关注,是因为它既可以快速检测复杂物体之间的碰撞,又可以减少计算量和内存占用,适用于实时应用和大规模场景。本篇文章旨在帮助读者了解AABB碰撞检测的基础知识、应用场景、碰撞检测流程以及如何实现和优化AABB碰撞检测算法。

12. 如何使用分离轴定理算法实现碰撞检测
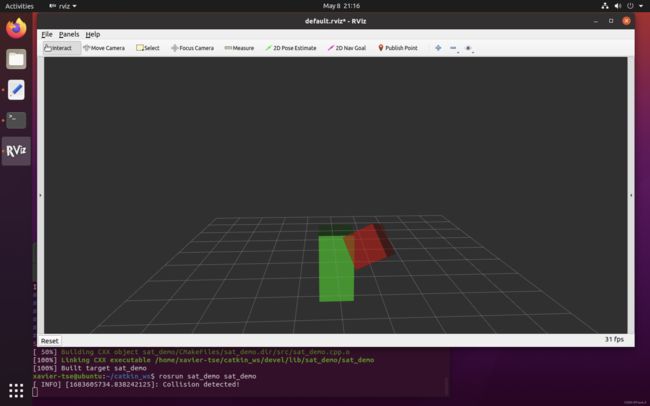
【运动规划算法项目实战】如何使用分离轴定理算法实现碰撞检测(附ROS C++代码)
分离轴定理(Separating Axis Theorem,简称SAT)是一种常用的碰撞检测算法,可以用于检测任何形状的物体之间的碰撞。在本文中,我们将介绍如何使用分离轴定理算法实现碰撞检测,并探讨其在自动驾驶和机器人领域中的应用。
13. 如何实现Dubins曲线和Reeds-Shepp曲线
【运动规划算法项目实战】如何实现Dubins曲线和Reeds-Shepp曲线(附ROS C++代码)
Dubins曲线和Reeds-Shepp曲线在机器人、自动驾驶行业中是非常重要的路径规划算法,它们能够有效地在不同的场景中生成最短路径,并且保证路径的可行性和安全性。本文将详细介绍Dubins曲线和Reeds-Shepp曲线的基本概念、算法实现、以及在机器人和自动驾驶领域的应用。

14. 如何使用Apollo Math模块实现碰撞检测
【运动规划算法项目实战】如何使用Apollo Math模块实现碰撞检测(附ROS C++代码)
在自动驾驶和机器人算法领域,碰撞检测是一项至关重要的任务。为了确保车辆或机器人能够安全地避免与障碍物发生碰撞,开发者需要使用高效准确的碰撞检测方法。Apollo开源平台的Math模块提供了强大的数学函数和工具,为碰撞检测提供了便捷的解决方案。

15. 如何生成运动物体的预测轨迹
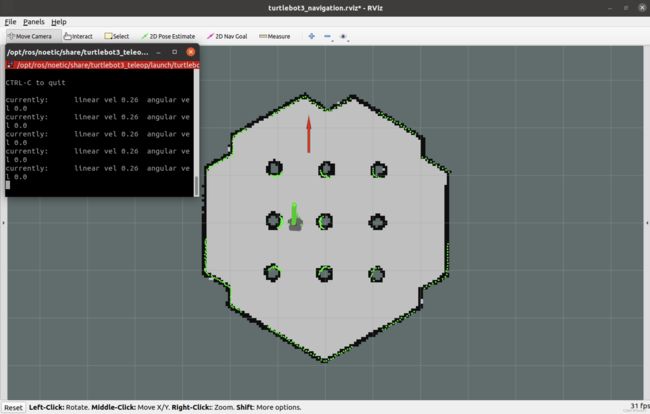
【运动规划算法项目实战】如何生成运动物体的预测轨迹(附ROS C++代码)
自动驾驶、机器人行业中,准确预测运动物体的轨迹是实现高级感知、路径规划和决策的关键技术之一。通过预测其他车辆、行人或障碍物的未来运动,自动驾驶系统能够做出更准确的决策并规划出更安全高效的路径。在机器人领域,预测运动物体的轨迹对于协作操作、避障和人机交互等任务同样至关重要。本文将探讨运动物体预测轨迹生成的方法和技术,介绍其中一种开源项目Fast-Tracker,并展示如何使用Turtlebot3平台实现预测轨迹的生成。我们将重点关注预测轨迹的原理和实现,以及该技术在自动驾驶和机器人行业中的应用前景。
16. Fast-Tracker代码分析
【运动规划算法项目实战】Fast-Tracker代码分析
Fast-Tracker是浙江大学空中机器人实验室提出的一种系统化的解决方案,它可以无人飞行器 (UAV) 在混乱复杂的环境中自主安全地跟踪目标。
17. 如何使用Pure Pursuit算法进行路径跟踪
如何使用Pure Pursuit算法进行路径跟踪(附ROS C++代码)
在自动驾驶和机器人导航领域,路径跟踪是一项关键技术,它使车辆或机器人能够按照预定的路径规划进行移动。路径跟踪算法的选择对于系统性能和安全性至关重要。本文将介绍一种常用且有效的路径跟踪算法——Pure Pursuit算法。我们将详细讨论Pure Pursuit算法的原理、实现步骤以及如何在自动驾驶和机器人系统中应用该算法进行路径跟踪。
【运动规划算法】三次样条曲线跟踪
18. 如何使用MPC算法进行路径跟踪
【运动规划算法项目实战】如何使用MPC算法进行路径跟踪(附ROS C++代码)
自动驾驶和机器人领域中,路径跟踪是一项关键技术,它使车辆或机器人能够沿着预定轨迹行驶或移动。传统的控制方法往往难以应对复杂的动态环境和非线性特性,而模型预测控制(Model Predictive Control,简称MPC)作为一种先进的控制方法,具有良好的适应性和鲁棒性。本文将介绍MPC算法的原理和流程,并提供代码实现,帮助读者理解和应用MPC技术进行路径跟踪。
【运动控制算法】模型预测控制(1)
【运动控制算法】模型预测控制(2)
19. 基于梯度的轨迹优化算法GTOP
【运动规划算法项目实战】基于梯度的轨迹优化算法GTOP(附ROS C++代码)
在机器人轨迹规划领域,寻找一条安全、平滑且动力学可行的轨迹是一项重要的任务。GTOP(Gradient-Based Trajectory Optimizer)是一种基于梯度的在线轨迹优化框架,它通过最小化碰撞代价、平滑性和动力学可行性的惩罚来解决路径规划问题。本文将介绍如何使用GTOP进行轨迹优化,帮助读者了解该算法的原理和使用方法。
【运动规划算法】基于梯度的安全轨迹生成
20. 基于采样的路径搜索算法
【运动规划算法项目实战】基于采样的路径搜索算法(附ROS C++代码)
路径规划是机器人和自动驾驶等领域中的核心问题之一。通过选择合适的路径,机器人能够安全高效地从起点到达目标点。其中,基于采样的路径规划算法是一种常用且有效的方法。本文将重点介绍Probabilistic Roadmap(PRM)和Rapidly-exploring Random Tree(RRT)两种基于采样的路径规划算法。我们将深入探讨它们的原理、优缺点、代码实现,以帮助你了解它们在路径规划中的应用和优势。
【运动规划算法】PRM算法
【运动规划算法】RRT算法
21. 如何构建欧几里德符号距离场
【运动规划算法项目实战】如何构建欧几里德符号距离场(附ROS C++代码)
欧几里德符号距离场(Euclidean Signed Distance Field,ESDF)是机器人感知和路径规划中的关键数据结构之一。它能够提供环境中每个点到最近障碍物的距离,并且能够表示距离的方向(内部或外部)。ESDF在自动驾驶、机器人导航以及避障等应用中具有重要的作用。本文将介绍ESDF的构建过程和关键步骤,帮助读者深入了解ESDF的原理与实现。
22. Dynamic Window Approach算法
在机器人行业中,路径规划是一个关键的任务,它使得机器人能够在复杂的环境中自主导航。动态窗口方法(Dynamic Window Approach,DWA)算法是一种常用的路径规划算法之一,它允许机器人实时地根据环境和自身动力学限制进行路径的生成和评估。本文将详细介绍DWA算法的原理、在机器人路径规划中的应用、算法优缺点以及代码的实现。
【运动规划算法】DWA算法
23. Artificial Potential Field算法
在机器人行业中,路径规划是一个关键的任务,它涉及到如何让机器人在复杂的环境中安全而高效地移动。人工势场算法(Artificial Potential Field Algorithm)是一种常用的路径规划方法,它借鉴了物理学中的势能概念,通过模拟力的作用来引导机器人的移动。本文将详细介绍人工势场算法的原理及其在路径规划中的应用。
【运动规划算法】人工势场算法
24. Time-Elastic-Band算法
【运动规划算法】Time Elastic Band