Jetsonnano B01 笔记2:GPIO库-Pycharm远程调试-点灯
今日继续我的Jetsonnano 学习之路,今日主要学习使用Pycharm远程调试Jetsonnano以及驱动使用Jetsonnano的GPIO库,最终尝试使用jetson点亮第一个LED。
本文搬运成分较多,因为Jetsonnano资料比较少,做这些笔记方便自己以及大家查阅。
目录
一、GPIO库:
Jetsonnano环境配置与安装库:
Python远程调试与库的导入:
一、ssh配置:
1. 确认ssh状态:
2. 获得设备IP
二、使用pycharm连接SSH:
三、Pycharm配置:
下载Jetson.GPIO库:
Python代码:
设置GPIO的引脚定义:
消除警告:
设置引脚的模式:
读取引脚的值:
设置引脚的值:
清除所有引脚的设置:
设置中断:
事件检测:
事件回调函数:
Jetsonnano点灯测试代码:
在Jetson上的运行:
运行Python文件:
停止python代码的运行:
测试效果图:
参考文章:
一、GPIO库:

Jetson TX1, TX2, AGX Xavier和Nano开发板包含一个40引脚GPIO头,类似于树莓派中的40引脚头。可以使用Jetson GPIO library包中提供的Python库来控制这些GPIO的数字输入和输出。该库具有与RPi相同的API。为树莓派的GPIO库,以便提供一种简单的方法来移动在树莓派上运行的应用程序到Jetson板。
本文档介绍了The Jetson GPIO库包中包含的内容,如何配置系统并运行提供的样例应用程序,以及库API。
Jetsonnano环境配置与安装库:
sudo apt-get updatesudo apt-get install python-pipsudo apt-get install python3-pip
2) 接着下载安装Jetson.GPIO库,依次输入下方指令:
sudo pip install Jetson.GPIOsudo pip3 install Jetson.GPIO
3) 然后设置用户权限,依次输入下方指令:
sudo groupadd -f -r gpiosudo usermod -a -G gpio your_user_name
4) 将99-gpio.rules文件复制到rules.d目录,输入以下命令:
sudo cp /opt/nvidia/jetson-gpio/lib/python/Jetson/GPIO/99-gpio.rules /etc/udev/rules.d/
注意:这里要确认python包里rules文件所在的位置是否如上命令
sudo udevadm control –reload-rules && sudo udevadm trigger
Python远程调试与库的导入:
有时我们不在jetson上使用pycharm 编程Python,可以选择在电脑上编程后将文件传输给jetson运行,嵌入式设备资源有限,在上面安装一个IDE有点浪费,所以,我们可以在常用开发设备上安装Pycharm,远程连接JetsonNano进行调试。 但电脑上没有jetson的GPIO库,因此这里学习一下怎么使用python远程调试以及导库:
一、ssh配置:
1. 确认ssh状态:
可以通过下面的命令可以查看ssh的状态:
ps -ef | grep ssh

如果只有ssh-agent 证明只开启了ssh client,没有ssh service,可以手动启动。
# 启动ssh服务
sudo /etc/init.d/ssh start
# 启动ssh服务
sudo service ssh start
# 重启ssh服务
sudo service ssh restart
2. 获得设备IP
ssh开启后,通过ifconfig 命令获得JetsonNano的 ip 地址,这里需要注意:
- (1)无线连接路由器上网方式,查找 wlan 后的ip
- (2)与路由器LAN口连接上网方式,查找 eth0 后的ip
二、使用pycharm连接SSH:

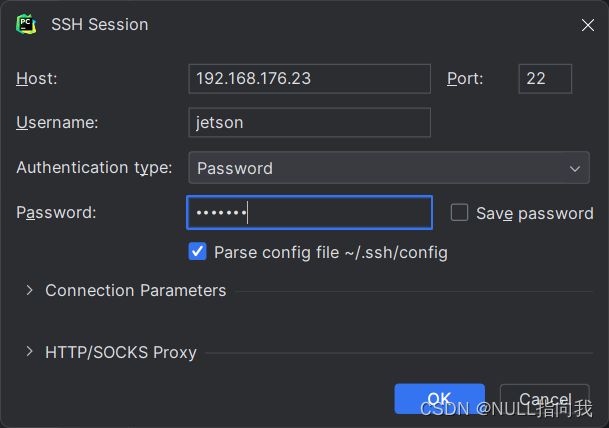
这样就成功连接上了:
三、Pycharm配置:
下载Jetson.GPIO库:
根据以下步骤找到并下载库:


Python代码:
设置GPIO的引脚定义:
#使用物理引脚编号模式,以板上引脚的物理位置为准。
GPIO.setmode(GPIO.BOARD)
#使用 Broadcom SoC 的引脚编号模式,以引脚在芯片上的编号为准。
GPIO.setmode(GPIO.BCM)
#使用 NVIDIA Tegra 芯片的引脚编号模式,以引脚在芯片上的编号为准。
GPIO.setmode(GPIO.CVM)
#同样使用 NVIDIA Tegra 芯片的引脚编号模式。
GPIO.setmode(GPIO.TEGRA_SOC)
消除警告:
GPIO.setwarnings(False)
设置引脚的模式:
GPIO.setup(channel, GPIO.IN) # 引脚设置为输入
GPIO.setup(channel, GPIO.OUT) # 引脚设置为输出
GPIO.setup(channel, GPIO.OUT, initial=GPIO.HIGH) # 带初始化的引脚定义
# 同时设定多个引脚的定义
channels = [18, 12, 13]
GPIO.setup(channels, GPIO.OUT)
读取引脚的值:
GPIO.input(channel) #返回值为GPIO.LOW or GPIO.HIGH
设置引脚的值:
GPIO.output(channel, state) #state可以是GPIO.LOW or GPIO.HIGH
清除所有引脚的设置:
GPIO.cleanup() #清除所有引脚的值
GPIO.cleanup([chan1, chan2]) #清除部分引脚的值
设置中断:
#第二个参数指定要检测的边缘,可以是GPIO.RISING、GPIO.FALLING或GPIO.BOTH。
#如果您只想将等待时间限制为指定的时间,可以选择设置超时:
GPIO.wait_for_edge(channel, GPIO.RISING)
GPIO.wait_for_edge(channel, GPIO.RISING, timeout=500)
事件检测:
GPIO.add_event_detect(channel, GPIO.RISING)
run_other_code()
if GPIO.event_detected(channel):
do_something()
事件回调函数:
def callback_one(channel):
print("First Callback")
def callback_two(channel):
print("Second Callback")
GPIO.add_event_detect(channel, GPIO.RISING)
GPIO.add_event_callback(channel, callback_one)
GPIO.add_event_callback(channel, callback_two)
Jetsonnano点灯测试代码:
#入Jetson.GPIO库并导入time库。
import Jetson.GPIO as GPIO
import time
#定义led_pin变量为GPIO引脚的数字编号,这里是7。
led_pin = 7
#设置GPIO模式为BOARD模式,表示使用物理引脚编号来确定GPIO引脚。
GPIO.setmode(GPIO.BOARD)
#设置led_pin引脚为输出模式。
GPIO.setup(led_pin, GPIO.OUT)
try:
while 1:
# 打印"on"并将led_pin引脚输出设置为高电平,点亮LED灯。
print("on")
GPIO.output(led_pin, GPIO.HIGH)
#使用time.sleep(2)函数延迟2秒
time.sleep(2)
#打印"off"并将led_pin引脚输出设置为低电平,熄灭LED灯。
print("off")
GPIO.output(led_pin, GPIO.LOW)
#使用time.sleep(2)函数延迟2秒
time.sleep(2)
# 如果在循环过程中按下了键盘的Ctrl+C,将会触发KeyboardInterrupt异常。
#在异常处理代码中,将led_pin引脚设置为低电平并执行GPIO.cleanup()函数,清理GPIO资源。
except KeyboardInterrupt:
GPIO.output(led_pin, GPIO.LOW)
GPIO.cleanup()
#打印"done"表示程序运行结束。
print("done")
在Jetson上的运行:
运行Python文件:
编写完代码后保存为.py文件,再将此文件SSH远程传输给Jetsonnano,此处我是直接使用NoMachine远程连接了它的桌面,直接将其拖入文件资源管理器了:

然后就是打开Jetsonnano的终端,运行这段Python代码(没装Python的需要装):
#此处filename是你自己的文件名
python3 filename.py这里注意此处filename是你自己的文件名,我的文件名是1,因此替换为
python3 1.py然后回车就可以运行了。
停止python代码的运行:
列出所有正在运行的Python进程:
ps aux | grep python终止进程(其中`pid`是要终止的Python进程的进程ID):
kill pid测试效果图:
参考文章:
JetsonNano教程:Pycharm远程调试运行及本地与远端文件同步_jetsonnano运行pycharm-CSDN博客
jetson nano GPIO控制说明_jetson nano 引脚_AoDeLuo的博客-CSDN博客