OpenCV 图像金字塔+通道分离+Canny算子求取边缘
OpenCV 图像金字塔+通道分离+Canny边缘的一个实例
学习OpenCV上一个不太完整的例子,对图像做两次金字塔缩小,做一次三通道分离得到一通道,再做Canny算子求边缘。把它完整填补了一下,写一下心得:
// CannyWay.cpp -- Try Canny to find the contours
#include 
图像金字塔要点
每次缩小之前做一次判断,如果长宽不都能被2整除,就放弃进行缩小。原因是cvPyrDown只能对可整除的长宽进行处理。
*这里有一些可以优化的地方,如果不能被2整除,可以考虑把不能被2整除的长或宽切掉一个像素。
IplImage* doPyrDown(
IplImage* in,
int filter = IPL_GAUSSIAN_5x5
){
// Best to make sure input image is divisable by two.
//
assert(in->width >= 2 && in->height >= 2);
IplImage* in2 = cvCreateImage(cvSize(floor(in->width/2)*2,floor(in->height/2)*2), in->depth, in->nChannels);
CvRect Rect = cvRect(0, 0, floor(in->width/2)*2, floor(in->height/2)*2);
cvSetImageROI(in, Rect);
cvCopy(in, in2);
IplImage* out = cvCreateImage(
cvSize(in2->width / 2, in2->height / 2),
in2->depth,
in2->nChannels);
cvPyrDown(in2, out);
return(out);
};如下图所示大小变化
通道分离要点
注意到三个通道的命名,是反过来的,蓝色通道在前,红色通道在最后。
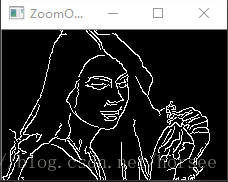
cvSplit(img2, bimg2, gimg2, rimg2, 0);Canny算子求边缘要点
Canny只能对单通道图像直接运算,如果图像本身含有多个通道需要首先进行分离。