cesium实现键盘控制模型姿态变化效果
文章目录
-
- 1.实现效果
- 2.实现方法
-
- 2.1实现思路
- 2.2具体代码
Cesium实战系列文章总目录: 传送门
1.实现效果
2.实现方法
参考官方沙盒示例:传送门
2.1实现思路
(1)加载模型
使用model的fromGltf方法加载模型,API:传送门
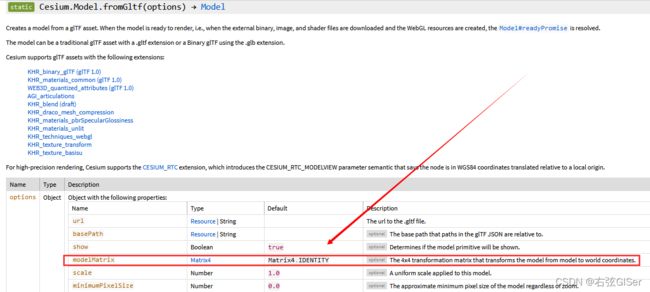
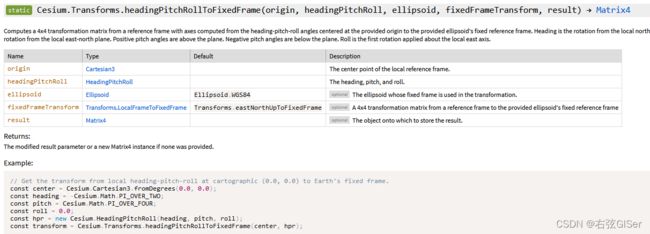
(2)设置变换矩阵
使用Tranforms类的headingPitchRollToFixedFrame方法设置模型的变化矩阵modelMatrix,API:传送门
将姿态和位置变化后的模型转换到WGS84椭球的位置上。
(3)监听键盘事件
通过监听键盘事件来更改模型的姿态,键盘事件如下:
| 键盘 | 事件 |
|---|---|
| ↑ | 抬头 |
| ↓ | 低头 |
| ← | 左转 |
| → | 右转 |
| 0 | 顺时针转 |
| . | 逆时针转 |
| + | 加速 |
| - | 减速 |
(4)渲染更新前监听
监听scene的preUpdate事件,API:传送门
当事件发生时,更新模型的姿态和位置。

2.2具体代码
具体实现代码如下:
// 初始化viewer
const viewer = new Cesium.Viewer("cesiumContainer", {
// 允许动画
shouldAnimate: true,
});
// 设置相机初始位置
viewer.camera.setView({
destination: {
x: -2769293.799109788,
y: 4796599.883886506,
z: 3171113.878101777
},
orientation: {
heading: 6.283185307179586,
pitch: -0.7854060155492881,
roll: 6.283185307179586
}
})
let headingPitchRoll = new Cesium.HeadingPitchRoll();
// 模型初始位置
let position = new Cesium.Cartesian3.fromDegrees(120, 30, 5000);
// 局部变换坐标系
let fixedFrameTransform = Cesium.Transforms.localFrameToFixedFrameGenerator("north", "west");
// 每次操作姿态变化为5°
let deltaRadians = Cesium.Math.toRadians(5.0);
// 使用primitive方式加载模型
let airplaneModel = viewer.scene.primitives.add(
Cesium.Model.fromGltf({
url: '../.././icons/hz/model/airplane.glb',
scale: 100.0,
modelMatrix: Cesium.Transforms.headingPitchRollToFixedFrame(
position,
headingPitchRoll,
Cesium.Ellipsoid.WGS84,
fixedFrameTransform
),
minimumPixelSize: 256,
}))
// 添加键盘监听事件
document.addEventListener('keydown', function(e) {
switch (e.keyCode) {
// 抬头
case 38:
headingPitchRoll.pitch += deltaRadians;
// 判断是否超过2π范围
if (headingPitchRoll.pitch > Cesium.Math.TWO_PI) {
headingPitchRoll.pitch -= Cesium.Math.TWO_PI;
}
console.log("抬头:pitch+");
break;
// 低头
case 40:
headingPitchRoll.pitch -= deltaRadians;
if (headingPitchRoll.pitch < -Cesium.Math.TWO_PI) {
headingPitchRoll.pitch += Cesium.Math.TWO_PI;
}
console.log("低头:pitch-");
break;
// 左转
case 37:
headingPitchRoll.heading -= deltaRadians;
// 判断是否超过2π范围
if (headingPitchRoll.heading < -Cesium.Math.TWO_PI) {
headingPitchRoll.heading += Cesium.Math.TWO_PI;
}
console.log("左转:heading+");
break;
// 右转
case 39:
headingPitchRoll.heading += deltaRadians;
// 判断是否超过2π范围
if (headingPitchRoll.heading > Cesium.Math.TWO_PI) {
headingPitchRoll.heading -= Cesium.Math.TWO_PI;
}
console.log("右转:heading-");
break;
// 顺时针
case 96:
headingPitchRoll.roll += deltaRadians;
// 判断是否超过2π范围
if (headingPitchRoll.roll > Cesium.Math.TWO_PI) {
headingPitchRoll.roll -= Cesium.Math.TWO_PI;
}
console.log("顺时针翻滚:roll+");
break;
// 逆时针
case 110:
headingPitchRoll.roll -= deltaRadians;
// 判断是否超过2π范围
if (headingPitchRoll.roll < -Cesium.Math.TWO_PI) {
headingPitchRoll.roll += Cesium.Math.TWO_PI;
}
console.log("逆时针翻滚:roll-");
break;
// 加速
case 107:
speed += 10
speed = Math.min(speed, 10000);
console.log("加速:" + speed);
break;
// 减速
case 109:
speed -= 10;
speed = Math.max(speed, 100);
console.log("减速:" + speed);
break;
default:
break;
}
})
// 速度
let speed = 100;
// 速度向量
let speedVector = new Cesium.Cartesian3();
// 飞行路径
const pathPosition = new Cesium.SampledPositionProperty();
const entityPath = viewer.entities.add({
position: pathPosition,
name: "飞行路径",
path: {
show: true,
leadTime: 0,
trailTime: 60,
width: 20,
resolution: 1,
material: new Cesium.PolylineGlowMaterialProperty({
glowPower: 0.3,
taperPower: 0.3,
color: Cesium.Color.PALEGOLDENROD,
}),
},
});
// 渲染更新前阶段添加监听
viewer.scene.preUpdate.addEventListener(() => {
speedVector = Cesium.Cartesian3.multiplyByScalar(
Cesium.Cartesian3.UNIT_X,
speed / 10,
speedVector
);
position = Cesium.Matrix4.multiplyByPoint(
airplaneModel.modelMatrix,
speedVector,
position
);
// 将点添加到路径中
pathPosition.addSample(Cesium.JulianDate.now(), position);
// 更新模型姿态与位置
Cesium.Transforms.headingPitchRollToFixedFrame(
position,
headingPitchRoll,
Cesium.Ellipsoid.WGS84,
fixedFrameTransform,
airplaneModel.modelMatrix
)
})