基于卷积神经网络的手写字体识别(详细笔记)
主要参考博客:
1、 基于卷积神经网络的手写数字识别(附数据集+完整代码+操作说明)
2、用PyTorch实现MNIST手写数字识别(最新,非常详细)
基于卷积神经网络的手写字体识别——目录
- 1 前言
-
- 1.1 实现效果
- 1.2 学习背景
- 1.3 关于MNIST手写数据集
- 2 残差网络
-
- 2.1 深度学习中的退化问题
- 2.2 残差网络结构
- 2.3 残差块的网络模型
- 3 实现步骤&代码详析
-
- 3.1 训练模型
-
- 3.1.1 数据集选择
- 3.1.2 网络构建
- 3.1.3 测试网络
- 3.1.4 训练网络
- 3.2 手写数字识别
-
- 3.2.1 图像预处理
- 3.2.2 图像识别
- 4 附录(完整程序,复制即可使用)
-
- 4.1 hand_write_train.py
- 4.2 IsBlackGround.py
- 4.3 mainBoard.py
- 4.4 MainWidget.py
- 4.5 PaintBoard.py
- 4.6 Pre_treatment.py
- 4.7 predict.py
- 4.8 predictPhoto.py
1 前言
1.1 实现效果

运行程序mainBoard.py,生成一个手写板,在手写板上画图即可识别大部分正常的手写体数字。(无法识别过于抽象的书写,鲁棒性不是很强。识别数字9的时候也有点问题,作者没有做数字增强)
1.2 学习背景
手写数字识别,作为机器视觉入门项目,无论是基于传统的OpenCV方法还是基于目前火热的深度学习、神经网络的方法都有这不错的训练效果。当然,这个项目也常常被作为大学/研究生阶段的课程实验。通常作为接触深度学习的第一个小项目。
作者本人也是刚刚开始接触深度学习,而对象就是手写数字识别。网上存在大量案例,就不必要自己去动手手搓神经网络,而可以借助网上成熟的项目案例,快速接触成功的项目,分析这些项目的代码学习如何去搭建一个神经网络。避免自己陷入重复造轮子而收获很少的陷阱中。
这个项目大概花费3-4天就可以让个人熟悉残差网络(ResNet)的基本框架。有助于新手了解了解神经网络的网络结构,作为日后进一步学习的垫脚石。
1.3 关于MNIST手写数据集
MNIST 数据集(手写数字数据集)是一个公开的公共数据集,任何人都可以免费获取它。目前,它已经是一个作为机器学习入门的通用性特别强的数据集之一,所以对于想要学习机器学习分类的、深度神经网络分类的、图像识别与处理的小伙伴,都可以选择MNIST数据集入门。

该数据集包含60 000个用于训练的示例和10 000个用于测试的示例。数据集包含了0-9共10类手写数字图片,每张图片都做了尺寸归一化,都是28x28大小的灰度图。
| 内容概括 | 文件名称 | 文件大小 | 包含内容 |
|---|---|---|---|
| 训练集图像 | train-images-idx3-ubyte.gz | 9.9MB | 60000个样本 |
| 训练集标签 | train-labels-idx1-ubyte.gz | 29KB | 60000个标签 |
| 测试集图像 | t10k-images-idx3-ubyte.gz | 1.6MB | 10000个样本 |
| 测试集标签 | t10k-labels-idx1-ubyte.gz | 5KB | 10000个标签 |
2 残差网络
2.1 深度学习中的退化问题
参考:残差网络ResNet网络原理及实现
在深度神经网络训练中,从经验来看,随着网络深度的增加,模型理论上可以取得更好的结果。但是实验却发现,深度神经网络中存在着退化问题(Degradation problem)。即深层网络的训练效果不如浅层网络。
残差网络解决了网络退化问题。
2.2 残差网络结构
ResNet中最重要的是残差学习单元:

对于一个堆积层结构(几层堆积而成)当输入为x时其学习到的特征记为H(x),现在我们希望其可以学习到残差F(x)=H(x)-x,这样其实原始的学习特征是F(x)+x 。当残差为0时,此时堆积层仅仅做了恒等映射,至少网络性能不会下降,实际上残差不会为0,这也会使得堆积层在输入特征基础上学习到新的特征,从而拥有更好的性能。一个残差单元的公式如下:
y = F ( x , W i ) + W s x y=F(x,{W_{i}})+W_{s}x y=F(x,Wi)+Wsx
程序中编写的网络结构:

残差网络ResNET的优点:
- 跳跃连接: ResNet引入了跳跃连接,允许网络直接传递输入到输出层,避免了梯度消失问题,使得可以训练更深的网络。在传统的CNN中没有。
- 残差学习:核心思想是学习残差(residual),即学习如何对输入进行微小的修改,从而得到正确的输出。这使得网络训练更加稳定,容易优化。
- 层数: ResNet通常比传统的CNN具有更深的层数,因为跳跃连接的引入有助于缓解深层网络的问题。
- 网络性能: 由于引入了残差学习和跳跃连接,ResNet在一些情况下表现更好,特别是当网络变得很深时。然而,对于一些较小的任务,传统的CNN可能仍然表现出色。
2.3 残差块的网络模型
- 残差块Resnet_block:由多个残差模块组成的序列(Sequential),形成完整的残差块
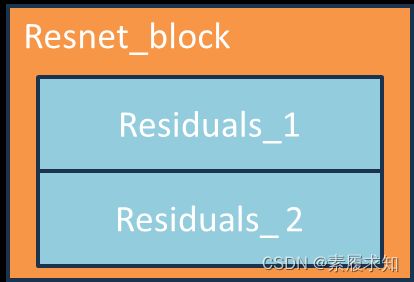
- 残差模块Residuals:包含两个卷积层conv和一些批标准差层BatchNorm2d
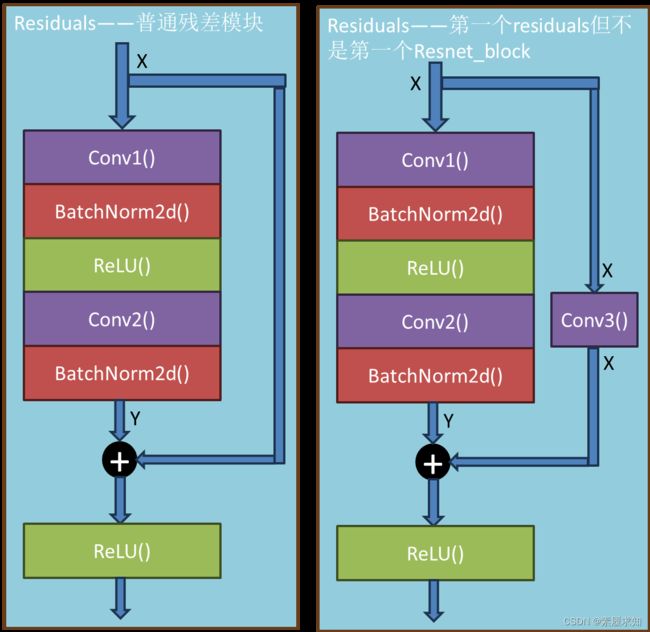
- Conv3()的作用:使用1x1卷积来匹配通道数
3 实现步骤&代码详析
3.1 训练模型
3.1.1 数据集选择
手写数字识别经典数据集:本文数据集选择的MNIST 数据集(手写数字数据集),共含有六万张28*28的训练集手写图片和一万张28*28的测试集手写图片(二值图片)

3.1.2 网络构建
传统机器学习的问题与缺陷随着深度学习的发展被得到解决,深度学习也可以说是神经网络的重命名,他是建立在多层非线性的神经网络结构之上,对数据表示进行抽象的一系列机器学习。深度学习的出现使得图像,语言得到突破性的发展。
最基本的单元是神经元模型。每个神经元与其他神经元相连,当他“兴奋”时,就会向相连的神经元发送物质,改变神经元的电位。如果某个神经元的电位超过了一个阀值,那么它就会被激活。结果抽象可以得到沿用至今的M_P神经元模型。

线性部分,是简单的相乘相加,激活部分是利用激活函数处理得到输出。常见的激活函数有sigmoid,relu等,本次采用的激活函数是relu函数。

由神经元组成的多层神经网络,如图所示。有输入层,输出层以及中间隐含层。每一个输入线性求合,通过激活函数,传到下一个神经元,不必一个个的去算,使用向量化来使得程序更加简洁。


下面展示 ResNET 网络模型。
# import torch
# from torch import nn, optim
# import torch.nn.functional as F
# ResNet模型
net = nn.Sequential(
# 顺序容器,网络结构
nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3), # 二维卷积层
nn.BatchNorm2d(64), # 二维批标准化层
nn.ReLU(), # ReLUctant激活函数层
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)) # 二维最大池化层
# 三个残差块ResNet block,增强模型的深度和复杂性
# 和sequential的层次不同,残差块的resnet_block是自定义的
net.add_module("resnet_block1", resnet_block(64, 64, 2, first_block=True))
net.add_module("resnet_block2", resnet_block(64, 128, 2))
net.add_module("resnet_block3", resnet_block(128, 256, 2))
net.add_module("global_avg_pool", GlobalAvgPool2d()) # GlobalAvgPool2d的输出: (Batch, 512, 1, 1)
# 全局平均池化层
net.add_module("fc", nn.Sequential(FlattenLayer(), nn.Linear(256, 10)))
# 展平层(FlattenLayer)将特征图转换为一维向量
# 全连接层(nn.Linear)将特征映射到10个输出类别上
ResNet是一个非常流行的深度学习架构,用于解决图像分类和其他计算机视觉任务。
下面是对以上代码的解释:
- 首先,第一段代码
net = nn.Sequential(
# 顺序容器,网络结构
nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3), # 二维卷积层
nn.BatchNorm2d(64), # 二维批标准化层
nn.ReLU(), # ReLUctant激活函数层
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)) # 二维最大池化层
a) nn.Sequential:这是一个顺序容器,用于将一系列的神经网络层按顺序组合在一起,构建一个整体的神经网络模型。
b) nn.Conv2d:这是一个二维卷积层。在这里,你使用一个卷积核大小为7x7,步长为2,填充为3,将单通道的输入图像转换为64通道的特征图。
c) nn.BatchNorm2d:这是一个二维批标准化层,用于规范化输入数据的均值和方差,以加速训练和增强模型的稳定性。
d) nn.ReLU:这是一个ReLU激活函数层,用于引入非线性性。
e) nn.MaxPool2d:这是一个二维最大池化层,用于降低特征图的空间分辨率。
2. 然后,通过net.add_module()添加了三个残差块(resnet_block),这些块会增加模型的深度和复杂性,以帮助提取更丰富的特征。
def resnet_block(in_channels, out_channels, num_residuals, first_block=False)
·in_channels 输入通道数
·out_channels 输出通道数
·num_residuals 残差数
·first_block 是否为第一个残差块
net.add_module("resnet_block1", resnet_block(64, 64, 2, first_block=True))
net.add_module("resnet_block2", resnet_block(64, 128, 2))
net.add_module("resnet_block3", resnet_block(128, 256, 2))
- 接下来,通过添加一个全局平均池化层(GlobalAvgPool2d)将特征图压缩为大小为1x1的特征图。
net.add_module("global_avg_pool", GlobalAvgPool2d()) # GlobalAvgPool2d的输出: (Batch, 512, 1, 1)
# 全局平均池化层
- 然后,通过添加一个展平层(FlattenLayer)将特征图转换为一维向量,
- 最后,通过一个全连接层(nn.Linear)将特征映射到10个输出类别上。
net.add_module("fc", nn.Sequential(FlattenLayer(), nn.Linear(256, 10)))
# 展平层(FlattenLayer)将特征图转换为一维向量
# 全连接层(nn.Linear)将特征映射到10个输出类别上
3.1.3 测试网络
构建完网络后,可以随机生成一个Tensor,对ResNet网络进行前向传播,查看每层的形状。程序如下:
# 测试网络
# 对构建的ResNet模型进行前向传播,查看每个层的输出形状的示例
X = torch.rand((1, 1, 28, 28))
# 创建了一个随机初始化的输入Tensor,形状为(1, 1, 28, 28)。表示一个 单通道 的 28x28 像素的图像
for name, layer in net.named_children():
# 通过循环遍历ResNet模型的每一层。
X = layer(X)
# 通过循环遍历ResNet模型的每一层。
print(name, ' output shape:\t', X.shape)
# 打印当前层的名字和输出X的形状。
关于torch.size(x,y,z,q)各维度解释:
第一个维度:表示批量大小(batch size),即一次性输入的样本数量。
第二个维度:表示通道数(channels),在卷积层中,这通常指的是输入通道的数量。
第三个维度:表示高度(height),特征图的高度。
第四个维度:表示宽度(width),特征图的宽度。
使用一个循环遍历ResNet模型的每一层,并通过前向传播将输入数据 X 通过模型的每一层。在每一次循环迭代中,打印出当前层的名称以及输出 X 的形状。
3.1.4 训练网络
网络训练最好放在GPU上,根据反复测试当迭代达到40次就基本完成收敛,使用RTX3060的GPU只需要10多分钟就能完成训练。而使用CPU来训练,可能需要2小时以上。训练网络的程序如下:
print('============Start to Train=======================')
# 训练 迭代40次 达到99.3%
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
# 检查是否可用,将神经网络放在CUDA设备(GPU)上进行训练,如果不可用则使用CPU
lr, num_epochs = 0.001, 40
# lr 学习率;num_epoch 训练轮数
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
# 优化器:将网络的参数传递给优化器,,以便在训练过程中更新权重
batch_size = 4000 # 设置批次大小
net = net.to(device) # 将网络移动到合适的设备上(GPU或CPU)
# 以下是初始化参数
print("training on \t", device)
loss = torch.nn.CrossEntropyLoss() # 计算交叉熵损失的损失函数
loop_times = round(60000 / batch_size) # 每个训练的迭代次数
train_acc_plot = [] # 训练准确率列表
test_acc_plot = [] # 测试准确率列表
loss_plot = [] # 损失值列表
for epoch in range(num_epochs): # 轮询训练循环
train_l_sum, train_acc_sum, n, batch_count, start = 0.0, 0.0, 0, 0, time.time()
# 总损失、总训练准确率、总样总数、批次计数和开始时间
for i in tqdm(range(1, loop_times),position=0):
# 迭代进度条
x = train_images[(i - 1) * batch_size:i * batch_size]
y = train_labels[(i - 1) * batch_size:i * batch_size]
x = torch.unsqueeze(x, 1) # 对齐维度 以与网络输入的维度相匹配
X = x.to(device) # 数据移动到设备上GPU/CPU
y = y.to(device) # 标签移动到设备上GPU/CPU
y_hat = net(X) # 前向传播计算网络的预测值
l = loss(y_hat, y) # 计算交叉熵损失,预测值y_hat与真实标签y之间
optimizer.zero_grad() # 清空优化器梯度
l.backward() # 反向传播
optimizer.step() # 权重更新
train_l_sum += l.cpu().item() # 累计每个批次的损失-将损失值从GPU移到CPU,并提取为Python标量
train_acc_sum += (y_hat.argmax(dim=1) == y).sum().cpu().item() # 累计每个批次的准确率
n += y.shape[0] # 更新样本总数
batch_count += 1 # 更新批次计算
test_acc = evaluate_accuracy(test_images, test_labels, net) # 计算测试集准确率,并打印
print('epoch %d, loss %.4f, train acc %.3f, test acc %.3f, time %.1f sec'
% (epoch + 1, train_l_sum / batch_count, train_acc_sum / n, test_acc, time.time() - start))
# 保存模型到文件中
torch.save(net.state_dict(), 'logs/Epoch%d-Loss%.4f-train_acc%.4f-test_acc%.4f.pth' % (
(epoch + 1), train_l_sum / batch_count, train_acc_sum / n, test_acc))
print("save successfully") # 完成一轮的训练
# append 添加,增加,附增
test_acc_plot.append(test_acc) # 测试准确率列表
train_acc_plot.append(train_acc_sum / n) # 训练准确率列表
loss_plot.append(train_l_sum / batch_count) # 损失列表
首先进行神经网络的训练设置:
- 检查GPU是否可用,若可用则将神经网络放在CUDA设备上进行训练
- 设置学习率(lr)和训练轮数(num epochs)。
- 创建Adam优化器,将网络参数传递给优化器,以便在训练过程中更新权重。
- 设置每个批次的大小(batch_size)。
- 将网络移动到适当的设备(GPU或CPU)上。
- 初始化用于记录训练过程中准确率和损失的列表(train_acc_plot、test_acc_plot、loss_plot)。
- torch.nn.CrossEntropyLoss()是一个用于计算交叉熵损失的损失函数。它将模型的预测概率分布与真实标签之间的差异作为损失,通过最小化这个损失来优化模型。
- loop_times是用来确定在每个训练迭代中需要循环的次数。总训练样本数(60000)除以每个批次的大小(batch_size),然后四舍五入到最接近的整数。这个值说明了在每个训练轮次中,需要多少次循环来遍历所有的训练数据。
将这两个部分结合起来,可以在每次训练迭代中,计算交叉熵损失,并将其用于反向传播和权重更新。这样,在每个训练轮次中,都会使用多次循环来逐批次地处理训练数据,最终优化模型的参数以提高准确率。
后面是关于训练轮询的解析。在每个训练轮次(epoch)中,通过多次循环遍历训练数据的批次来训练网络:
- train_l_sum、train_acc_sum、n、batch_count、start等变量用于累计每个轮次中的总损失、总训练准确率、总样本数、批次计数和开始时间。
- time.time() 是 Python 中的一个函数,用于获取当前的时间戳(以秒为单位)。它可以用于测量代码执行的时间,计算时间间隔,或者在代码的不同部分插入时间戳来进行时间统计。
for i in tqdm(range(1, loop_times),position=0):#内部循环
-
在每个循环中,从训练集中获取一个批次的输入数据 x 和标签 y。将 x 的维度扩展,以与网络输入的维度相匹配。
-
将数据和标签移动到设备(GPU或CPU)上。
-
通过前向传播计算网络的预测值 y_hat。
-
计算损失l,使用 loss 对象计算预测值与真实标签之间的交叉熵损失。
-
清空优化器的梯度,并进行反向传播和权重更新。optimizer.step() 是 PyTorch 中用于执行梯度下降步骤的方法。在神经网络训练中,它被用于更新模型的参数(权重和偏置),以减少损失函数的值,从而优化模型的性能。每次参数更新之前,一般会先使用 optimizer.zero_grad() 来清空之前的梯度,然后进行正向传播、反向传播和参数更新。
-
累计每个批次的损失和准确率。
l.cpu().item():将损失值从GPU移到CPU,并提取为Python标量
(y_hat.argmax(dim=1) == y).sum().cpu().item():
首先通过(y_hat.argmax(dim=1) == y)计算模型的预测结果是否与真是标签相匹配。argmax(dim=1) 操作返回每个样本中最大值所在的索引,表示模型预测的类别。与真实值比较后,得到一个bool张量(Tensor,即多维数组multidimensional array),返回True或False。
.sum():这部分代码对布尔张量进行求和操作,统计出预测正确的样本数量。
.cpu().item():这部分代码将计算得到的张量从 GPU 移动到 CPU,并将其提取为 Python 标量,以便在代码中使用和记录。 -
更新样本总数和批次计数。
================================================================== -
在每个轮次结束后,计算并打印训练损失、训练准确率和测试准确率。同时,将模型的权重保存到文件中。
-
将测试准确率、训练准确率和损失分别添加到用于绘制图形的列表中。
这个循环会迭代完所有的训练数据,进行参数更新,并在每个轮次结束后进行一些记录和保存。整个循环的目标是通过多次迭代优化网络的权重,使其逐渐学习数据的模式和特征,从而提高在测试数据上的准确率。在每个轮次结束时,你可以查看模型的性能,保存模型权重,并记录训练和测试准确率随着训练轮次的变化情况。
3.2 手写数字识别
3.2.1 图像预处理
图像预处理的主要步骤:


3.2.2 图像识别
将输入的图片进行预处理,完成ROI提取后,把图像输入到之前训练好的模型中进行预测即可。

4 附录(完整程序,复制即可使用)
4.1 hand_write_train.py
# author:Hurricane
# date: 2020/11/4
# E-mail:[email protected]
import numpy as np
import struct
import matplotlib.pyplot as plt
import cv2 as cv
import random
import torch
from torch import nn, optim
import torch.nn.functional as F
import time
from tqdm import tqdm
## 训练集文件
train_images_idx3_ubyte_file = 'D:/CQUPT/软通团队/2023暑假/Task6:深度学习/Hand_wrtten-master/dataset/train-images.idx3-ubyte'
# 训练集标签文件
train_labels_idx1_ubyte_file = 'D:/CQUPT/软通团队/2023暑假/Task6:深度学习/Hand_wrtten-master/dataset/train-labels.idx1-ubyte'
# 测试集文件
test_images_idx3_ubyte_file = 'D:/CQUPT/软通团队/2023暑假/Task6:深度学习/Hand_wrtten-master/dataset/t10k-images.idx3-ubyte'
# 测试集标签文件
test_labels_idx1_ubyte_file = 'D:/CQUPT/软通团队/2023暑假/Task6:深度学习/Hand_wrtten-master/dataset/t10k-labels.idx1-ubyte'
# 读取数据部分
def decode_idx3_ubyte(idx3_ubyte_file, processingLabel):
# 更新偏移量,以便跳过已经处理的图像数据。
bin_data = open(idx3_ubyte_file, 'rb').read()
# rb:以二进制读取模式打开文件
offset = 0
fmt_header = '>iiii' # 因为数据结构中前4行的数据类型都是32位整型,所以采用i格式,但我们需要读取前4行数据,所以需要4个i。我们后面会看到标签集中,只使用2个ii。
# 计算每张图片的像素数。
# 魔术数(Magic Number)是一个固定的值或标识,通常用于识别文件格式、协议、数据结构等。魔术数在文件头部或数据的起始位置,用于表明数据的类型或格式,帮助程序识别文件内容并进行正确的处理。
magic_number, num_images, num_rows, num_cols = struct.unpack_from(fmt_header, bin_data, offset)
print('图片数量: %d张, 图片大小: %d*%d' % (num_images, num_rows, num_cols))
# 解析数据集
image_size = num_rows * num_cols # 计算每张图片的像素数。
offset += struct.calcsize(fmt_header) # 获得数据在缓存中的指针位置,从前面介绍的数据结构可以看出,读取了前4行之后,指针位置(即偏移位置offset)指向0016。
print(offset)
fmt_image = '>' + str(
image_size) + 'B' # 图像数据像素值的类型为unsigned char型,对应的format格式为B。这里还有加上图像大小784,是为了读取784个B格式数据,如果没有则只会读取一个值(即一副图像中的一个像素值)
print(fmt_image, offset, struct.calcsize(fmt_image))
images = np.empty((num_images, 28, 28))
# 创建一个NumPy数组,用于存储解析后的图片数据。每张图片的大小是 28x28 像素。
# numpy.empty(shape, dtype=float, order='C'),形状,数据类型,C-行优先,F-列优先
# plt.figure()
for i in tqdm(range(num_images),desc=str(processingLabel),position=0):
image = np.array(struct.unpack_from(fmt_image, bin_data, offset)).reshape((num_rows, num_cols)).astype(np.uint8)
# np.array(struct.unpack_from(fmt_image, bin_data, offset))
# 从二进制数据中解包出一张图片的像素数据,存储在 image 变量中。
# image = image.reshape((num_rows, num_cols)).astype(np.uint8)
# 将解包的像素数据重新形状为 28x28 的图像,数据类型转换为 无符号8位 整数。
# images[i] = cv.resize(image, (96, 96))
images[i] = image # 将处理后的图像存储在 images 数组的相应位置
# print(images[i])
offset += struct.calcsize(fmt_image) # 更新偏移量,以便跳过已经处理的图像数据。
return images
def decode_idx1_ubyte(idx1_ubyte_file, processingLabel):
bin_data = open(idx1_ubyte_file, 'rb').read()
offset = 0
fmt_header = '>ii'
magic_number, num_images = struct.unpack_from(fmt_header, bin_data, offset)
print('图片数量: %d张' % num_images)
# 解析数据集
offset += struct.calcsize(fmt_header)
fmt_image = '>B'
labels = np.empty(num_images)
for i in tqdm(range(num_images),position=0,desc=str(processingLabel)):
labels[i] = struct.unpack_from(fmt_image, bin_data, offset)[0]
offset += struct.calcsize(fmt_image)
return labels
def load_train_images(idx_ubyte_file=train_images_idx3_ubyte_file):
return decode_idx3_ubyte(idx_ubyte_file, 'Train_images')
def load_train_labels(idx_ubyte_file=train_labels_idx1_ubyte_file):
return decode_idx1_ubyte(idx_ubyte_file, 'Train_labels')
def load_test_images(idx_ubyte_file=test_images_idx3_ubyte_file):
return decode_idx3_ubyte(idx_ubyte_file, 'Test_images')
def load_test_labels(idx_ubyte_file=test_labels_idx1_ubyte_file):
return decode_idx1_ubyte(idx_ubyte_file,'Test_labels')
# 构建网络部分
class Residual(nn.Module): # 本类已保存在d2lzh_pytorch包中方便以后使用
def __init__(self, in_channels, out_channels, use_1x1conv=False, stride=1):
super(Residual, self).__init__()
self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1, stride=stride)
self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1)
if use_1x1conv:
self.conv3 = nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride)
else:
self.conv3 = None
self.bn1 = nn.BatchNorm2d(out_channels) # 批标准差
self.bn2 = nn.BatchNorm2d(out_channels)
def forward(self, X):
Y = F.relu(self.bn1(self.conv1(X)))
Y = self.bn2(self.conv2(Y))
if self.conv3:
X = self.conv3(X)
return F.relu(Y + X)
class GlobalAvgPool2d(nn.Module):
# 全局平均池化层可通过将池化窗口形状设置成输入的高和宽实现
def __init__(self):
super(GlobalAvgPool2d, self).__init__()
def forward(self, x):
return F.avg_pool2d(x, kernel_size=x.size()[2:])
def resnet_block(in_channels, out_channels, num_residuals, first_block=False):
# num_residuals:残差数
if first_block:
assert in_channels == out_channels # 第一个模块的通道数同输入通道数一致
blk = [] # 空序列
for i in range(num_residuals):
# i从0开始循环,知道num_residuals-1
if i == 0 and not first_block:
blk.append(Residual(in_channels, out_channels, use_1x1conv=True, stride=2))
# append:增加,附加
else:
blk.append(Residual(out_channels, out_channels))
return nn.Sequential(*blk) # 根据构建好的残差模块序列blk,通过sequential转化成一个完整的序列表示整个残差块
def evaluate_accuracy(img, label, net):
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
acc_sum, n = 0.0, 0
with torch.no_grad():
X = torch.unsqueeze(img, 1)
if isinstance(net, torch.nn.Module):
net.eval() # 评估模式, 这会关闭dropout
acc_sum += (net(X.to(device)).argmax(dim=1) == label.to(device)).float().sum().cpu().item()
net.train() # 改回训练模式
else: # 自定义的模型, 3.13节之后不会用到, 不考虑GPU
if ('is_training' in net.__code__.co_varnames): # 如果有is_training这个参数
# 将is_training设置成False
acc_sum += (net(X, is_training=False).argmax(dim=1) == label).float().sum().item()
else:
acc_sum += (net(X).argmax(dim=1) == label).float().sum().item()
n += label.shape[0]
return acc_sum / n
class FlattenLayer(torch.nn.Module):
def __init__(self):
super(FlattenLayer, self).__init__()
def forward(self, x): # x shape: (batch, *, *, ...)
return x.view(x.shape[0], -1)
if __name__ == '__main__':
print("train:")
train_images_org = load_train_images().astype(np.float32)
train_labels_org = load_train_labels().astype(np.int64)
print("test")
test_images = load_test_images().astype(np.float32)[0:1000]
test_labels = load_test_labels().astype(np.int64)[0:1000]
# 数据转换为Tensor
train_images = torch.from_numpy(train_images_org)
train_labels = torch.from_numpy(train_labels_org)
test_images = torch.from_numpy(test_images)
test_labels = torch.from_numpy(test_labels)
# test_images = load_test_images()
# test_labels = load_test_labels()
# 查看前十个数据及其标签以读取是否正确
for i in range(10):
j = random.randint(0, 60000) # 0-60000之间产生一个随机数
print("now, show the number of image[{}]:".format(j), int(train_labels_org[j]))
# 使用了字符串的.format()方法来插入一个占位符 {}
# 将train_labels_org中第j个位置的元素(标签)转换为整数
# 如:now, show the number of image[39430]: 6
# 第39430张照片是6
img = train_images_org[j]
img = cv.resize(img, (600, 600))
cv.imshow("image", img)
cv.waitKey(0) # 按空格
cv.destroyAllWindows()
print('all done!')
print("*" * 50)
# import torch
# from torch import nn, optim
# import torch.nn.functional as F
# ResNet模型
net = nn.Sequential(
# 顺序容器,网络结构
nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3), # 二维卷积层
nn.BatchNorm2d(64), # 二维批标准化层
nn.ReLU(), # ReLUctant激活函数层
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)) # 二维最大池化层
# 三个残差块ResNet block,增强模型的深度和复杂性
# 和sequential的层次不同,残差块的resnet_block是自定义的
net.add_module("resnet_block1", resnet_block(64, 64, 2, first_block=True))
net.add_module("resnet_block2", resnet_block(64, 128, 2))
net.add_module("resnet_block3", resnet_block(128, 256, 2))
net.add_module("global_avg_pool", GlobalAvgPool2d()) # GlobalAvgPool2d的输出: (Batch, 512, 1, 1)
# 全局平均池化层
net.add_module("fc", nn.Sequential(FlattenLayer(), nn.Linear(256, 10)))
# 展平层(FlattenLayer)将特征图转换为一维向量
# 全连接层(nn.Linear)将特征映射到10个输出类别上
# 测试网络
# 对构建的ResNet模型进行前向传播,查看每个层的输出形状的示例
X = torch.rand((1, 1, 28, 28))
# 创建了一个随机初始化的输入Tensor,形状为(1, 1, 28, 28)。表示一个 单通道 的 28x28 像素的图像
for name, layer in net.named_children():
# 通过循环遍历ResNet模型的每一层。
X = layer(X)
# 通过循环遍历ResNet模型的每一层。
print(name, ' output shape:\t', X.shape)
# 打印当前层的名字和输出X的形状。
print('*' * 50)
print('============Start to Train=======================')
# 训练 迭代40次 达到99.3%
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
# 检查是否可用,将神经网络放在CUDA设备(GPU)上进行训练,如果不可用则使用CPU
lr, num_epochs = 0.001, 40
# lr 学习率;num_epoch 训练轮数
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
# 优化器:将网络的参数传递给优化器,,以便在训练过程中更新权重
batch_size = 4000 # 设置批次大小
net = net.to(device) # 将网络移动到合适的设备上(GPU或CPU)
# 以下是初始化参数
print("training on \t", device)
loss = torch.nn.CrossEntropyLoss() # 计算交叉熵损失的损失函数
loop_times = round(60000 / batch_size) # 每个训练的迭代次数
train_acc_plot = [] # 训练准确率列表
test_acc_plot = [] # 测试准确率列表
loss_plot = [] # 损失值列表
for epoch in range(num_epochs): # 轮询训练循环
train_l_sum, train_acc_sum, n, batch_count, start = 0.0, 0.0, 0, 0, time.time()
# 总损失、总训练准确率、总样总数、批次计数和开始时间
for i in tqdm(range(1, loop_times),position=0):
# 迭代进度条
x = train_images[(i - 1) * batch_size:i * batch_size]
y = train_labels[(i - 1) * batch_size:i * batch_size]
x = torch.unsqueeze(x, 1) # 对齐维度 以与网络输入的维度相匹配
X = x.to(device) # 数据移动到设备上GPU/CPU
y = y.to(device) # 标签移动到设备上GPU/CPU
y_hat = net(X) # 前向传播计算网络的预测值
l = loss(y_hat, y) # 计算交叉熵损失,预测值y_hat与真实标签y之间
optimizer.zero_grad() # 清空优化器梯度
l.backward() # 反向传播
optimizer.step() # 权重更新
train_l_sum += l.cpu().item() # 累计每个批次的损失-将损失值从GPU移到CPU,并提取为Python标量
train_acc_sum += (y_hat.argmax(dim=1) == y).sum().cpu().item() # 累计每个批次的准确率
n += y.shape[0] # 更新样本总数
batch_count += 1 # 更新批次计算
test_acc = evaluate_accuracy(test_images, test_labels, net) # 计算测试集准确率,并打印
print('epoch %d, loss %.4f, train acc %.3f, test acc %.3f, time %.1f sec'
% (epoch + 1, train_l_sum / batch_count, train_acc_sum / n, test_acc, time.time() - start))
# 保存模型到文件中
torch.save(net.state_dict(), 'logs/Epoch%d-Loss%.4f-train_acc%.4f-test_acc%.4f.pth' % (
(epoch + 1), train_l_sum / batch_count, train_acc_sum / n, test_acc))
print("save successfully") # 完成一轮的训练
# append 添加,增加,附增
test_acc_plot.append(test_acc) # 测试准确率列表
train_acc_plot.append(train_acc_sum / n) # 训练准确率列表
loss_plot.append(train_l_sum / batch_count) # 损失列表
x = range(0,40)
# 绘制训练和测试准确率、损失随训练轮次变化的图像
plt.plot(x, test_acc_plot, 'r', label='Test Accuracy')
plt.plot(x, train_acc_plot, 'g', label='Train Accuracy')
plt.plot(x, loss_plot, 'b', label='Loss')
plt.xlabel('Epoch')
plt.ylabel('Value')
plt.title('Training and Test Metrics')
plt.legend()
plt.show() # 显示绘制的图像
print("*" * 50)
4.2 IsBlackGround.py
from PIL import Image
def is_black_background(image):
# 获取图片的像素数据
pixels = image.getdata()
width, height = image.size
# 统计黑色和白色像素的数量
black_count = 0
white_count = 0
for pixel in pixels:
# 判断是否为黑色像素
if pixel[0] < 128: # 假设RGB值中的R通道代表亮度,小于128认为是黑色
black_count += 1
# 判断是否为白色像素
if pixel[0] > 192: # 假设RGB值中的R通道代表亮度,大于192认为是白色
white_count += 1
# 判断是否为黑底白字
return black_count > white_count
def invert_image(image):
# 反相处理图片
inverted_image = Image.eval(image, lambda x: 255 - x)
return inverted_image
4.3 mainBoard.py
# 加载库
from MainWidget import MainWidget
from PyQt5.QtWidgets import QApplication
import sys
def main():
app = QApplication(sys.argv)
mainWidget = MainWidget() # 新建一个主界面
mainWidget.show() # 显示主界面
exit(app.exec_()) # 进入消息循环
if __name__ == '__main__':
main()
4.4 MainWidget.py
'''
Created on 2018年8月8日
@author: Freedom
'''
from PyQt5.Qt import QWidget, QColor, QPixmap, QIcon, QSize, QCheckBox
from PyQt5.QtWidgets import QHBoxLayout, QVBoxLayout, QPushButton, QSplitter, \
QComboBox, QLabel, QSpinBox, QFileDialog,QTextEdit
from PaintBoard import PaintBoard
import numpy as np
from PIL import Image
import cv2 as cv
from Pre_treatment import get_number as g_n # .py文件 图形预处理
import predict as pt
from time import time
from Pre_treatment import softmax # .py文件 二分类函数
net = pt.get_net()
class MainWidget(QWidget):
def __init__(self, Parent=None):
'''
Constructor
'''
super().__init__(Parent)
self.__InitData() # 先初始化数据,再初始化界面
self.__InitView()
def __InitData(self):
'''
初始化成员变量
'''
self.__paintBoard = PaintBoard(self)
# 获取颜色列表(字符串类型)
self.__colorList = QColor.colorNames()
def __InitView(self):
'''
初始化界面
'''
self.setFixedSize(640, 480)
self.setWindowTitle("PaintBoard Example PyQt5")
# 新建一个水平布局作为本窗体的主布局
main_layout = QHBoxLayout(self)
# 设置主布局内边距以及控件间距为10px
main_layout.setSpacing(10)
# 在主界面左侧放置画板
main_layout.addWidget(self.__paintBoard)
# 新建垂直子布局用于放置按键
sub_layout = QVBoxLayout()
# 设置此子布局和内部控件的间距为10px
sub_layout.setContentsMargins(10, 10, 10, 10)
self.__btn_Clear = QPushButton("清空画板")
self.__btn_Clear.setParent(self) # 设置父对象为本界面
# 将按键按下信号与画板清空函数相关联
self.__btn_Clear.clicked.connect(self.__paintBoard.Clear)
sub_layout.addWidget(self.__btn_Clear)
self.__btn_yuce = QPushButton("智能预测")
self.__btn_yuce.setParent(self) # 设置父对象为本界面
self.__btn_yuce.clicked.connect(lambda:self.yuce())
sub_layout.addWidget(self.__btn_yuce)
self.__text_out = QTextEdit(self)
self.__text_out.setParent(self)
self.__text_out.setObjectName("预测结果为:")
sub_layout.addWidget(self.__text_out)
self.__btn_Quit = QPushButton("退出")
self.__btn_Quit.setParent(self) # 设置父对象为本界面
self.__btn_Quit.clicked.connect(self.Quit)
sub_layout.addWidget(self.__btn_Quit)
self.__btn_Save = QPushButton("保存作品")
self.__btn_Save.setParent(self)
self.__btn_Save.clicked.connect(self.on_btn_Save_Clicked)
sub_layout.addWidget(self.__btn_Save)
self.__cbtn_Eraser = QCheckBox(" 使用橡皮擦")
self.__cbtn_Eraser.setParent(self)
self.__cbtn_Eraser.clicked.connect(self.on_cbtn_Eraser_clicked)
sub_layout.addWidget(self.__cbtn_Eraser)
splitter = QSplitter(self) # 占位符
sub_layout.addWidget(splitter)
self.__label_penThickness = QLabel(self)
self.__label_penThickness.setText("画笔粗细")
self.__label_penThickness.setFixedHeight(20)
sub_layout.addWidget(self.__label_penThickness)
self.__spinBox_penThickness = QSpinBox(self)
self.__spinBox_penThickness.setMaximum(40)
self.__spinBox_penThickness.setMinimum(2)
self.__spinBox_penThickness.setValue(20) # 默认粗细为10
self.__spinBox_penThickness.setSingleStep(2) # 最小变化值为2
self.__spinBox_penThickness.valueChanged.connect(
self.on_PenThicknessChange) # 关联spinBox值变化信号和函数on_PenThicknessChange
sub_layout.addWidget(self.__spinBox_penThickness)
self.__label_penColor = QLabel(self)
self.__label_penColor.setText("画笔颜色")
self.__label_penColor.setFixedHeight(20)
sub_layout.addWidget(self.__label_penColor)
self.__comboBox_penColor = QComboBox(self)
self.__fillColorList(self.__comboBox_penColor) # 用各种颜色填充下拉列表
self.__comboBox_penColor.currentIndexChanged.connect(
self.on_PenColorChange) # 关联下拉列表的当前索引变更信号与函数on_PenColorChange
sub_layout.addWidget(self.__comboBox_penColor)
main_layout.addLayout(sub_layout) # 将子布局加入主布局
def __fillColorList(self, comboBox):
index_black = 0
index = 0
for color in self.__colorList:
if color == "black":
index_black = index
index += 1
pix = QPixmap(70, 20)
pix.fill(QColor(color))
comboBox.addItem(QIcon(pix), None)
comboBox.setIconSize(QSize(70, 20))
comboBox.setSizeAdjustPolicy(QComboBox.AdjustToContents)
comboBox.setCurrentIndex(index_black)
def on_PenColorChange(self):
color_index = self.__comboBox_penColor.currentIndex()
color_str = self.__colorList[color_index]
self.__paintBoard.ChangePenColor(color_str)
def on_PenThicknessChange(self):
penThickness = self.__spinBox_penThickness.value()
self.__paintBoard.ChangePenThickness(penThickness)
def on_btn_Save_Clicked(self):
savePath = QFileDialog.getSaveFileName(self, 'Save Your Paint', '.\\', '*.png')
print(savePath)
if savePath[0] == "":
print("Save cancel")
return
image = self.__paintBoard.GetContentAsQImage()
image.save(savePath[0])
def on_cbtn_Eraser_clicked(self):
if self.__cbtn_Eraser.isChecked():
self.__paintBoard.EraserMode = True # 进入橡皮擦模式
else:
self.__paintBoard.EraserMode = False # 退出橡皮擦模式
def Quit(self):
self.close()
def yuce(self):
# #标准化图片 获取Y
savePath = "./image_rgzn/test.png"
image = self.__paintBoard.GetContentAsQImage()
image.save(savePath)
#img_path = Image.open(savePath)
# start
img = cv.imread(savePath)
img_bw = g_n(img)
# 下面这一段就是ROI提取
img_bw_c = img_bw.sum(axis=1) / 255
img_bw_r = img_bw.sum(axis=0) / 255
r_ind, c_ind = [], []
for k, r in enumerate(img_bw_r):
if r >= 5:
r_ind.append(k)
for k, c in enumerate(img_bw_c):
if c >= 5:
c_ind.append(k)
img_bw_sg = img_bw[c_ind[0]:c_ind[-1], r_ind[0]:r_ind[-1]]
leng_c = len(c_ind)
leng_r = len(r_ind)
side_len = leng_c + 20
add_r = int((side_len - leng_r) / 2)
img_bw_sg_bord = cv.copyMakeBorder(img_bw_sg, 10, 10, add_r, add_r, cv.BORDER_CONSTANT, value=[0, 0, 0])
# 展示图片
#cv.imshow("img", img_bw)
#print('output img')
# cv.imshow("img_sg", img_bw_sg_bord)
#print('output img_sg')
# = cv.waitKey(1) & 0xff
img_in = cv.resize(img_bw_sg_bord, (28, 28)) # 重构成28*28的大小
cv.imshow("28*28",img_in)
result_org = pt.predict(img_in, net)
#print('over predict')
result = softmax(result_org)
#print('softmax')
best_result = result.argmax(dim=1).item()
#print('result.argmax:',best_result)
best_result_num = max(max(result)).cpu().detach().numpy()
#print('best_result_num')
if best_result_num <= 0.5:
best_result = None
# end
self.__text_out.setText(str(best_result))
print("predict result is :",best_result)
# print("hello")
# res = QMessageBox.information(self,"人工智能判断为:",str(p),QMessageBox.Yes|QMessageBox.No)
# res.exec_()
# 读取数据权重
# 预测并输出
4.5 PaintBoard.py
'''
Created on 2018年8月9日
@author: Freedom
'''
from PyQt5.QtWidgets import QWidget
from PyQt5.Qt import QPixmap, QPainter, QPoint, QPaintEvent, QMouseEvent, QPen, \
QColor, QSize
from PyQt5.QtCore import Qt
class PaintBoard(QWidget):
def __init__(self, Parent=None):
'''
Constructor
'''
super().__init__(Parent)
self.__InitData() # 先初始化数据,再初始化界面
self.__InitView()
def __InitData(self):
self.__size = QSize(280, 280)
# 新建QPixmap作为画板,尺寸为__size
self.__board = QPixmap(self.__size)
self.__board.fill(Qt.black) # 用白色填充画板
self.__IsEmpty = True # 默认为空画板
self.EraserMode = False # 默认为禁用橡皮擦模式
self.__lastPos = QPoint(0, 0) # 上一次鼠标位置
self.__currentPos = QPoint(0, 0) # 当前的鼠标位置
self.__painter = QPainter() # 新建绘图工具
self.__thickness = 10 # 默认画笔粗细为10px
self.__penColor = QColor("white") # 设置默认画笔颜色为黑色
self.__colorList = QColor.colorNames() # 获取颜色列表
def __InitView(self):
# 设置界面的尺寸为__size
self.setFixedSize(self.__size)
def Clear(self):
# 清空画板
self.__board.fill(Qt.black)
self.update()
self.__IsEmpty = True
def ChangePenColor(self, color="black"):
# 改变画笔颜色
self.__penColor = QColor(color)
def ChangePenThickness(self, thickness=10):
# 改变画笔粗细
self.__thickness = thickness
def IsEmpty(self):
# 返回画板是否为空
return self.__IsEmpty
def GetContentAsQImage(self):
# 获取画板内容(返回QImage)
image = self.__board.toImage()
return image
def paintEvent(self, paintEvent):
# 绘图事件
# 绘图时必须使用QPainter的实例,此处为__painter
# 绘图在begin()函数与end()函数间进行
# begin(param)的参数要指定绘图设备,即把图画在哪里
# drawPixmap用于绘制QPixmap类型的对象
self.__painter.begin(self)
# 0,0为绘图的左上角起点的坐标,__board即要绘制的图
self.__painter.drawPixmap(0, 0, self.__board)
self.__painter.end()
def mousePressEvent(self, mouseEvent):
# 鼠标按下时,获取鼠标的当前位置保存为上一次位置
self.__currentPos = mouseEvent.pos()
self.__lastPos = self.__currentPos
def mouseMoveEvent(self, mouseEvent):
# 鼠标移动时,更新当前位置,并在上一个位置和当前位置间画线
self.__currentPos = mouseEvent.pos()
self.__painter.begin(self.__board)
if self.EraserMode == False:
# 非橡皮擦模式
self.__painter.setPen(QPen(self.__penColor, self.__thickness)) # 设置画笔颜色,粗细
else:
# 橡皮擦模式下画笔为纯白色,粗细为10
self.__painter.setPen(QPen(Qt.white, 10))
# 画线
self.__painter.drawLine(self.__lastPos, self.__currentPos)
self.__painter.end()
self.__lastPos = self.__currentPos
self.update() # 更新显示
def mouseReleaseEvent(self, mouseEvent):
self.__IsEmpty = False # 画板不再为空
4.6 Pre_treatment.py
# author:Hurricane
# date: 2020/11/6
# E-mail:[email protected]
import cv2 as cv
import numpy as np
import os
from PIL import Image
def get_number(img):
# 图像预处理
# cv.imshow("beform precondition", img)
img_gray = cv.cvtColor(img, cv.COLOR_RGB2GRAY) # 灰度化
# cv.imshow("Gray",img_gray)
img_gray_resize = cv.resize(img_gray, (600, 600)) #重定义成600*600的灰度化图形
# cv.imshow("600*600",img_gray_resize)
ret, img_bw = cv.threshold(img_gray_resize, 200, 255, cv.THRESH_BINARY) # 二值化
# cv.imshow("Binary",img_bw)
# 判断是否图片是白底黑字的照片
white_count = np.sum(img_bw == 255)
black_count = np.sum(img_bw == 0)
if white_count > black_count:
# 白底黑字,进行反相处理
img_bw = cv.bitwise_not(img_bw)
# cv.imshow('white background', img_bw)
# cv.waitKey(1000)
kernel = np.ones((3, 3), np.uint8) # 设置核大小
# img_open = cv.morphologyEx(img_bw,cv.MORPH_CLOSE,kernel)
img_open = cv.dilate(img_bw, kernel, iterations=2) # 膨胀函数
# cv.imshow("dilate", img_open)
num_labels, labels, stats, centroids = \
cv.connectedComponentsWithStats(img_open, connectivity=8, ltype=None)
# OpenCV库中的connectedComponentsWithStats函数
# 该函数用于在二值图像中找到连通组件(连通区域),并返回每个连通组件的一些统计信息。
# 传入参数: img_open 二值化后的图像
# connectivity=8 表示使用8邻域连接
# ltype=None 表示返回的标签图像数据类型与输入图像相同
# 返回值: num_labels 表示图像中的连通组件数量,
# labels 是一个与输入图像大小相同的标签图像,其中每个像素值代表对应像素所属的连通组件标签
# stats 是一个NumPy数组,其中包含每个连通组件的统计信息(如面积、边界框等)
# centroids是一个NumPy数组,包含每个连通组件的中心坐标。
for sta in stats:
# 循环遍历,stats中的每一项sta表示一个连通组件的统计信息。
if sta[4] < 1000:
# 检查当前连通组件的面积(存储在sta的第5个元素中,由于Python的索引从0开始,所以使用sta[4]表示面积)是否小于1000。
cv.rectangle(img_open, tuple(sta[0:2]), tuple(sta[0:2] + sta[2:4]), (0, 0, 255), thickness=-1)
# 使用OpenCV的rectangle函数在img_open上绘制一个红色的矩形框,
# 将该连通组件的区域填充为红色。
# 这样就可以将面积较小的连通组件标记出来,方便后续处理或分析。
return img_open
def get_roi(img_bw):
# 图像ROI,感兴趣位置提取办法
img_bw_c = img_bw.sum(axis=1) / 255 # 各列方向上的像素求和并除去255,
img_bw_r = img_bw.sum(axis=0) / 255 # 各行方向上的像素求和并除去255,
all_sum = img_bw_c.sum(axis=0) # 全部像素求和
if all_sum != 0: # 不为全黑
r_ind, c_ind = [], []
for k, r in enumerate(img_bw_r): # 将满足像素和大于等于5的行的索引添加到r_ind列表中
if r >= 5:
r_ind.append(k)
for k, c in enumerate(img_bw_c): # 将满足像素和大于等于5的列的索引添加到c_ind列表中
if c >= 5:
c_ind.append(k)
if len(r_ind)==0 or len(c_ind)==0: #全黑的行或列则返回原图形
return img_bw
img_bw_sg = img_bw[c_ind[0]:c_ind[-1], r_ind[0]:r_ind[-1]]
# 基于r_ind和c_ind的索引,裁剪图像,提取出需要保留的区域
leng_c = len(c_ind) # 计算保留区域的边长,长
leng_r = len(r_ind) # 计算保留区域的边长,宽
side_len = max(leng_c, leng_r) + 20 # 计算边长的基础上进行拓展
# 计算需要在保留区域周围添加的像素行数和列数。
# 确保保留区域的最终尺寸为正方形,且大小为side_len x side_len。
if leng_c == side_len:
add_r = int((side_len - leng_r) / 2)
add_c = 10
else:
add_r = 10
add_c = int((side_len - leng_c) / 2)
# 使用OpenCV的cv.copyMakeBorder函数,在保留区域周围添加一圈像素,从而扩展保留区域的尺寸。
# 添加的像素值为[0, 0, 0],即黑色。
img_bw_sg_bord = cv.copyMakeBorder(img_bw_sg, add_c, add_c, add_r, add_r, cv.BORDER_CONSTANT, value=[0, 0, 0])
return img_bw_sg_bord
else:
return img_bw
def softmax(X):
X_exp = X.exp()
partition = X_exp.sum(dim=1, keepdim=True)
return X_exp / partition
4.7 predict.py
# author:Hurricane
# date: 2020/11/5
# E-mail:[email protected]
# -------------------------------------#
# 对单张图片进行预测
# -------------------------------------#
import numpy as np
import struct
import matplotlib.pyplot as plt
import cv2 as cv
import random
import torch
from torch import nn, optim
import torch.nn.functional as F
class Residual(nn.Module):
def __init__(self, in_channels, out_channels, use_1x1conv=False, stride=1):
super(Residual, self).__init__()
self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1, stride=stride)
self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1)
if use_1x1conv:
self.conv3 = nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride)
else:
self.conv3 = None
self.bn1 = nn.BatchNorm2d(out_channels)
self.bn2 = nn.BatchNorm2d(out_channels)
def forward(self, X):
Y = F.relu(self.bn1(self.conv1(X)))
Y = self.bn2(self.conv2(Y))
if self.conv3:
X = self.conv3(X)
return F.relu(Y + X)
class GlobalAvgPool2d(nn.Module):
# 全局平均池化层可通过将池化窗口形状设置成输入的高和宽实现
def __init__(self):
super(GlobalAvgPool2d, self).__init__()
def forward(self, x):
return F.avg_pool2d(x, kernel_size=x.size()[2:])
def resnet_block(in_channels, out_channels, num_residuals, first_block=False):
# num_residuals:残差数
if first_block:
assert in_channels == out_channels # 第一个模块的通道数同输入通道数一致
blk = []
for i in range(num_residuals):
if i == 0 and not first_block:
blk.append(Residual(in_channels, out_channels, use_1x1conv=True, stride=2))
else:
blk.append(Residual(out_channels, out_channels))
return nn.Sequential(*blk)
class FlattenLayer(torch.nn.Module):
def __init__(self):
super(FlattenLayer, self).__init__()
def forward(self, x): # x shape: (batch, *, *, ...)
return x.view(x.shape[0], -1)
def get_net():
# 构建网络
# ResNet模型
model_path = r"D:\CQUPT\软通团队\2023暑假\Task6:深度学习\Hand_wrtten-master\logs\Epoch100-Loss0.0000-train_acc1.0000-test_acc0.9930.pth"
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
net = nn.Sequential(
nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
net.add_module("resnet_block1", resnet_block(64, 64, 2, first_block=True))
net.add_module("resnet_block2", resnet_block(64, 128, 2))
net.add_module("resnet_block3", resnet_block(128, 256, 2))
net.add_module("global_avg_pool", GlobalAvgPool2d()) # GlobalAvgPool2d的输出: (Batch, 512, 1, 1)
net.add_module("fc", nn.Sequential(FlattenLayer(), nn.Linear(256, 10)))
# 测试网络
# X = torch.rand((1, 1, 28, 28))
# for name, layer in net.named_children():
# X = layer(X)
# print(name, ' output shape:\t', X.shape)
# 加载网络模型
print("Load weight into state dict...")
stat_dict = torch.load(model_path, map_location=device)
net.load_state_dict(stat_dict)
net.to(device)
net.eval()
print("Load finish!")
return net
def predict(img, net):
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
img_in = torch.from_numpy(img)
img_in = torch.unsqueeze(img_in, 0)
img_in = torch.unsqueeze(img_in, 0).to(device)
img_in = img_in.float()
result_org = net(img_in)
return result_org
4.8 predictPhoto.py
# author:Hurricane
# date: 2020/11/6
# E-mail:[email protected]
import cv2 as cv
import numpy as np
import os
from Pre_treatment import get_number as g_n # .py文件 图形预处理
import predict as pt
from time import time
from Pre_treatment import softmax # .py文件 二分类函数
net = pt.get_net()
# 原始图片路径
#orig_path = r"real_img_resize"
#img_list = os.listdir(orig_path)
img_path = r'caise7.png'
# img = cv.imread(img_path)
since = time()
#img_path = os.path.join(orig_path, img_name)
# 输出拼接后的路径
#print(img_path)
img = cv.imread(img_path)
img_bw = g_n(img)
# 下面这一段就是ROI提取
img_bw_c = img_bw.sum(axis=1) / 255
img_bw_r = img_bw.sum(axis=0) / 255
r_ind, c_ind = [], []
for k, r in enumerate(img_bw_r):
if r >= 5:
r_ind.append(k)
for k, c in enumerate(img_bw_c):
if c >= 5:
c_ind.append(k)
img_bw_sg = img_bw[ c_ind[0]:c_ind[-1] ,r_ind[0]:r_ind[-1]]
leng_c = len(c_ind)
leng_r = len(r_ind)
side_len = leng_c + 20
add_r = int((side_len-leng_r)/2)
img_bw_sg_bord = cv.copyMakeBorder(img_bw_sg,10,10,add_r,add_r,cv.BORDER_CONSTANT,value=[0,0,0])
# 展示图片
cv.imshow("img", img_bw)
cv.imshow("img_sg", img_bw_sg_bord)
# = cv.waitKey(1) & 0xff
img_in = cv.resize(img_bw_sg_bord, (28, 28)) # 重构成28*28的大小
result_org = pt.predict(img_in, net)
result = softmax(result_org)
best_result = result.argmax(dim=1).item()
best_result_num = max(max(result)).cpu().detach().numpy()
if best_result_num <= 0.5:
best_result = None
# 显示结果
img_show = cv.resize(img, (600, 600))
end_predict = time()
fps = np.ceil(1 / (end_predict - since))
font = cv.FONT_HERSHEY_SIMPLEX
cv.putText(img_show, "The number is:" + str(best_result), (1, 30), font, 1, (0, 0, 255), 2)
cv.putText(img_show, "Probability is:" + str(best_result_num), (1, 60), font, 1, (0, 255, 0), 2)
cv.putText(img_show, "FPS:" + str(fps), (1, 90), font, 1, (255, 0, 0), 2)
cv.imshow("result", img_show)
cv.waitKey(1)
print(result)
print("*" * 50)
print("The number is:", best_result)
cv.waitKey(0)