POLARDB IMCI 白皮书 云原生HTAP 数据库系统 一 数据压缩打更新 (本篇有数据到列节点异步但不延迟的解释)...
开头还是介绍一下群,如果感兴趣polardb ,mongodb ,mysql ,postgresql ,redis 等有问题,有需求都可以加群群内有各大数据库行业大咖,CTO,可以解决你的问题。加群请联系 liuaustin3 ,在新加的朋友会分到2群(共1300人左右 1 + 2 + 3 + 4) 3群即将突破 400 会关闭自由申请,新人会进4群

这个系列很长时间没有更新了,还差2篇的翻译,最近会逐步更新。
一个时代的落幕,必然有成功者,也有失败者,失败是“成功者”定义的,而实际上“失败者” 也未必单纯是自己的问题,或许他只是出生在错误的时间,错误地点罢了,成功者也不必说,自己的一切都是自己的努力,帆船造型在好,材质在轻,在坚固也需要有风和浪。IMIC 在PolarDB 中是保证一个类 MySQL的数据库能处理MySQL无法处理的数据量与查询方式。
————————————————————————————
4.3 数据打包压缩和整理压缩
当部分package达到最大容量后,它会被转换为big package并压缩到磁盘上以减少空间消耗。压缩过程采用写同时复制模式避免访问中产生冲突。也就是说,生成一个新package来保存压缩数据,而不对部分package进行任何更改。(建立一个存放数据的容器进入的时候就被压缩了)PolarDB-IMCI在压缩后更新元数据,将部分打包的数据替换为新的package(即以原子方式更新指向新打包的指针),对于不同的数据类型,列索引采用不同的压缩算法。数值列采用参考帧、delta编码和位压缩的组合,而字符串列使用字典压缩。此外,由于打包是不可变的,当活动事务大于所有VID时,即没有活动事务引用插入VID映射时,该打包的插入VID映射是无用的。在这种情况下,PolarDB-IMCI会删除行组中的插入VID映射以减少内存占用。
整理
删除操作可能在一个打包中设置删除VID,从而在该打包中留下空洞。随着无效行的数量随时间增加,扫描性能和空间利用效率会降低。PolarDB-IMCI定期检测和重新整理不足的打包,以保持列索引无效行的低水位。例如,少于一半有效行的稀疏包被选为不能进行package。然后,后台线程发起一个整理事务,其中包括大量的更新操作,针对每个迁移的有效行,将选定的package的所有有效行,重新追加到部分打包中。请记住,列索引的更新操作是就地进行的,因此旧行在整理期间甚至之后仍然可以进行前台操作,这使得更新操作不受阻塞。整理后选定的打包在没有活动事务访问时将被永久删除。
5 更新
在本节中,我们描述了我们在同步异构数据存储方面的努力。对OLTP的最小干扰是PolarDB-IMCI的一个高优先级目标。为了实现这个目标,PolarDB-IMCI中的更新传播是通过REDO日志实现的,消除了将额外逻辑日志持久化的开销。在REDO日志的基础上,PolarDB需要尽可能及时地保持RO节点的更新以保持数据的新鲜度。为此,我们引入了前置提交日志传送(CALS)来减少可见延迟,并引入了两阶段无冲突并行回放(2P-COFFER)机制来提高回放吞吐量。

提前提交日志传输 为了最小化性能干扰,在PolarDB-IMCI中,对RO节点的更新是完全异步的。鉴于此,为增强数据的新鲜度,PolarDB-IMCI使用了提前提交日志传输(CALS)技术,在提交之前将事务传送到其他节点。如图5所示,一个事务由多个日志项组成:最后一个日志项是提交或中止日志,前面的日志项是DML日志。每个日志项都被分配了一个日志序列号(LSN)。例如,事务TID为101的日志项有LSN 300∼302。日志项300和301是DML操作的日志,而日志项302包含了事务的决定(即中止)。当RW节点将一个日志项写入共享存储(即PolarFS)后,它通过广播其最新的LSN(在我们的例子中为299)通知RO节点。当接收到LSN时,RO节点立即从PolarFS中读取日志。然后,每个DML日志都会被解析为一个DML语句,并基于其TID存储在一个事务缓冲区中(每个事务一个缓冲单元)。整个过程不需要等待RW节点提交事务。例如,在日志项299中的最终提交之前,具有TID 100的事务中的DML操作将被传输。当RO节点读取一个提交日志项时,较早的DML语句已经被解析并作为逻辑操作交付到事务缓冲区中,使得PolarDB-IMCI能够立即重放这些DML操作。当读取一个中止日志项时,RO节点只需释放事务缓冲区,无需回滚数据。
两阶段无冲突并行回放 如前所述,PolarDB-IMCI不会为了更新传播而生成额外的逻辑日志,而是重用REDO日志。其原因是日志传送会使RW节点写入更多的日志项,从而影响OLTP性能。然而,从长远来看,使用REDO日志同步异构存储被认为几乎是不可能的。这存在三个挑战:
(1) REDO日志仅记录行存储中物理页面的变化,缺乏数据库级别或表级别的信息(例如,RO节点不知道页面更改对应哪个表)。
(2) REDO日志还包括由行存储本身引起的页面更改,而不仅仅是用户的DML操作,例如B+树的分裂/合并和页面整理。列索引不能应用这些日志,否则可能导致不一致。
(3) REDO日志仅包含差异而不是完整的更新,以减少日志占用空间。

如图6所示,PolarDB-IMCI通过两个重放阶段解决了这些挑战。第一阶段是将REDO日志重放到RO节点的内存中的行存储的副本。在这个阶段,PolarDB-IMCI获取完整的信息,将REDO日志解析为逻辑DML语句。然后,第二阶段是将DML语句重放到列索引中,重放的性能对我们的系统至关重要。这些工作要么以会话粒度进行并行重放,要么以事务粒度进行并行重放,并借助冲突处理辅助工具(例如锁)或者乐观控制。与这些工作不同,PolarDB-IMCI提出了一种新的重放方法,即2P-COFFER,使得两个重放阶段都是无冲突的。在2P-COFFER中,第一阶段以页面粒度进行,而第二阶段以行粒度进行,以实现对不同页面/行的并发修改。修改相同页面/行但属于不同事务的日志条目被视为依赖项,应该按顺序重放。使用2P-COFFER,RO节点的重放吞吐量要远高于RW节点的OLTP吞吐量。
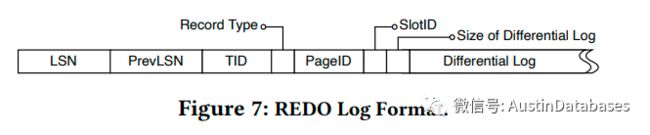
5.3 物理日志解析 如图7所示,PolarDB的REDO日志记录包含多个字段。为简单起见,我们以更新操作为例,其他类型的操作类似。
TID是创建此记录的事务标识符。
LSN表示日志中此记录的顺序。
PageID标识此记录更新的行所属的物理页面。偏移字段(SlotID)进一步确定更新的行在页面上的位置。
Data字段(差分日志)包含更新值与原始值之间的差异。第一阶段根据PageID将REDO日志分发给不同的工作者,并且每个工作者按照LSN的顺序重放页面更改以重现DML的细节。分发过程与第二阶段类似,但是以页面粒度进行,对于更新类型的日志记录,工作者在重放过程中将生成一个删除DML和一个插入DML,因为列索引是被更新到新的地方的。REDO日志的字段可能不包含主键(PK)信息,而删除DML需要主键信息因此,工作者根据PageID和偏移字段从PolarFS中获取旧行,并在工作条目之前使用旧行组装一个删除类型的DML。字段应用于提取的行中以重放页面更改,并在应用后组装插入DML。为了真正将操作组合成逻辑DML,每个操作还必须补充其他的信息。
通过记录在页面上的表ID来获取结构信息,同时必须识别行存储本身生成的日志条目(例如,B+树分裂)。为了处理这个问题,先检查一个日志条目是否属于活动事务。如果不属于,则确认该条目不是由用户事务生成的。如果属于,则进一步检查该条目的主键是否在活动事务中被重复插入(通过一个主键集合)。注意,重复的主键插入不是用户DML。因此,重复使用REDO日志会导致重放所有页面更改。作为一种优化,PolarDB-IMCI允许RO节点像RW节点一样维护行存储的缓冲池,以减少数据页面读取量。在我们的实践中,第一阶段的计算能力远远超过RW的日志产生能力。一方面,RO节点直接重现页面更改,无需重做事务的开销,如B+树遍历。另一方面,REDO日志在实际工作负载下始终作用于热页面,使得缓冲池的命中率接近99%。尽管缓冲池减少了用于OLAP的内存,但我们在这里进行了权衡,因为通过REDO日志减少对OLTP的干扰在我们的场景中具有更高优先级的。
第二阶段:逻辑DML应用 REDO日志的LSN顺序确保了日志重放的基本前提,这意味着在RO节点中的更改可以按照与RW相同的顺序进行。第一阶段打破了这个顺序。因此,在转换之后,后台线程将根据关联日志条目的LSN对DML进行排序。然后,后台线程将DML插入到事务缓冲单元中。
在第二阶段,调度程序将一批事务分发给多个工作者,以并行的方式对列索引进行修改。分发是逐行进行的,来自单个事务的DML语句将被分配给多个工作者进行重放。对于一个DML语句,调度程序通过对行主键的哈希值取模来分配指定的工作者。因此,即使这些DML语句属于不同的事务,修改相同行的DML语句将按照提交顺序被分配给相同的工作者。调度程序按照提交顺序处理每个事务,确保对同一行修改不同的值按照顺序传递给相同的线程,从而保证一致性。每个工作者按照步骤依次重放每个DML语句,并将更改批量提交到列索引中。
如果一个事务包含太多的操作,它的事务缓冲区单元可能会消耗大量的内存根据相关的原理,为了避免过度的内存消耗,PolarDB-IMCI对大事务进行预提交:当事务缓冲单元中的DML语句数量达到给定阈值时,将进行预提交。预提交的基本思想是将更新写入到具有无效插入和删除VID的部分数据包中,使得更新在暂时不可见。预提交的具体步骤如下。首先,为当前事务缓冲区中的所有行请求连续的RID,并保存此RID范围。在预提交阶段,全局RID定位器尚不能更改,以避免未提交事务的暴露。PolarDB-IMCI创建一个临时的RID定位器,而不是更新RID全局定位器以缓存新的PK到RID映射关系。然后,PolarDB-IMCI将更新写入到部分数据包中,同时将插入和删除VID设置为无效以使其不可见。最后,PolarDB-IMCI释放事务缓冲单元使用的内存。
当大事务提交时,PolarDB-IMCI将临时RID定位器合并到全局RID定位器中,并使用事务提交序列号纠正无效的VID(在保存的RID范围内)。否则,如果大事务中止,则临时定位器将被清除。部分数据包中剩余的预提交行无效,并将在后台的压缩线程中稍后消除。
