zemax像质评价
1、外形图
1.1二维外形图
如图所示,展示镜头的侧面图
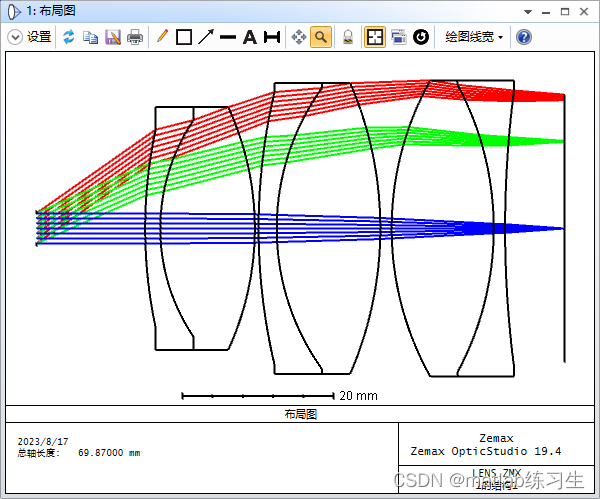
可以通过设置改变图中显示的内容:
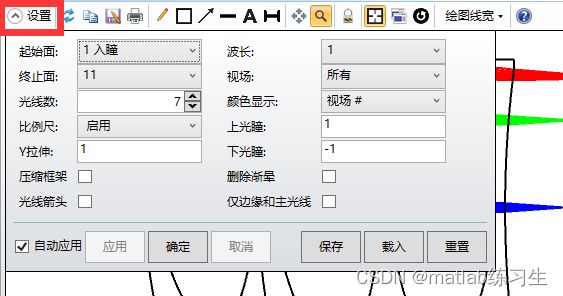
起始面:绘图的第一个面
终止面:绘图的最后一个面
光线数:画出的光线数(上图中的一个颜色就是7根线)
波长、视场:选择展示什么
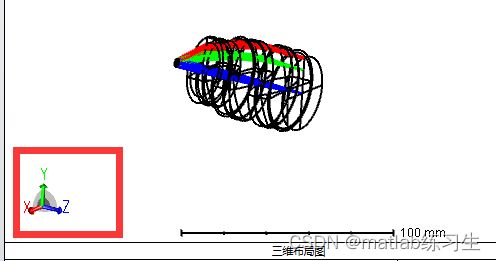
1.2三维外形图

可以设置旋转角度,效果:
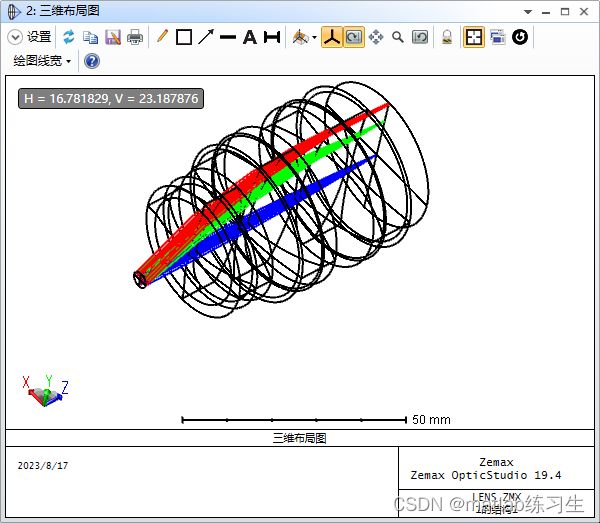
设置:
大部分设置和二维是一致的
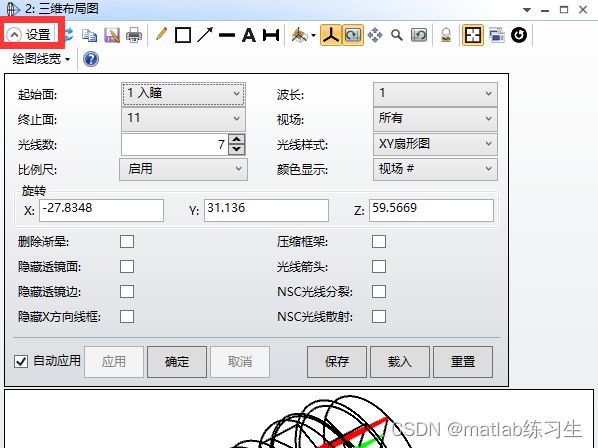
注意旋转的角度,这里默认值为0,0,0
坐标轴在左下角
1.3阴影图
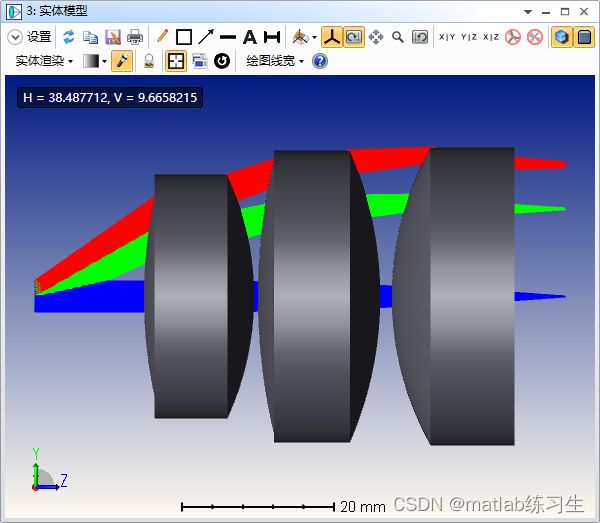
设置和三维图差不多,体感设计的时候用的不多
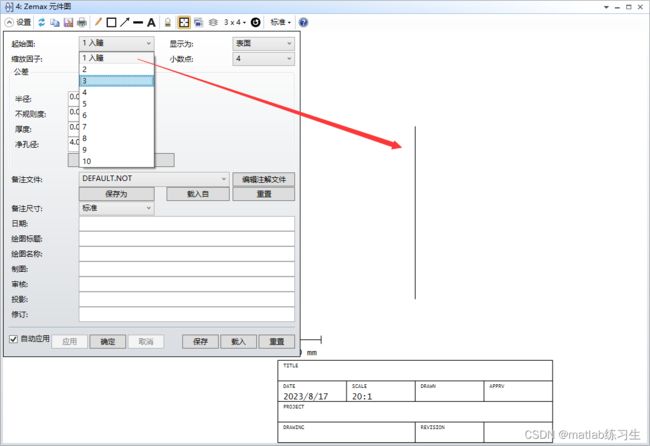
1.4元件图
提供表面、单透镜、双胶合透镜或者三胶合透镜的机械图
在这个位置:


通过设置切换不同的表面,每一个表面都有对应的数据
2、几何光学像质量评价
2.1光线像差
光线光扇图:
过光瞳Y轴的光束剖面,称为子午光扇;
过光瞳X轴的光束剖面,称为弧矢光扇。
可以显示作为光瞳坐标函数的光线像差。
对于视场内任意一点,取其子午面内的光线,以光线在光阑面上的透射点坐标为横坐标,同时以该光线在像面上的坐标为纵坐标,描出所有点,构成的图形即为子午面光扇图。
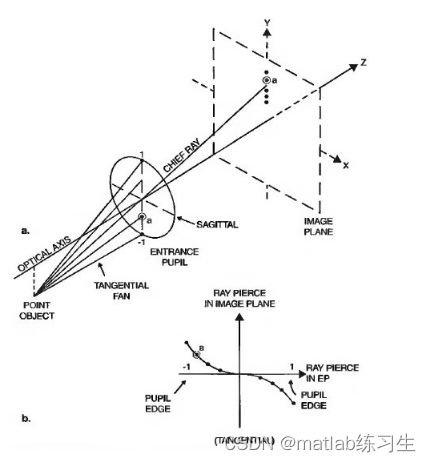
通过入瞳某一坐标(PX,PY)的光线在像面上有唯一的位置(EX,EY),以EX,EY为纵坐标,以PX,PY为横坐标,分别建立坐标系,把通过入瞳的光线都在坐标系里描点就得到了光扇图。
光扇图仅仅表示了通过光瞳的两个切面的状况,而不是整个光瞳
比如下图:
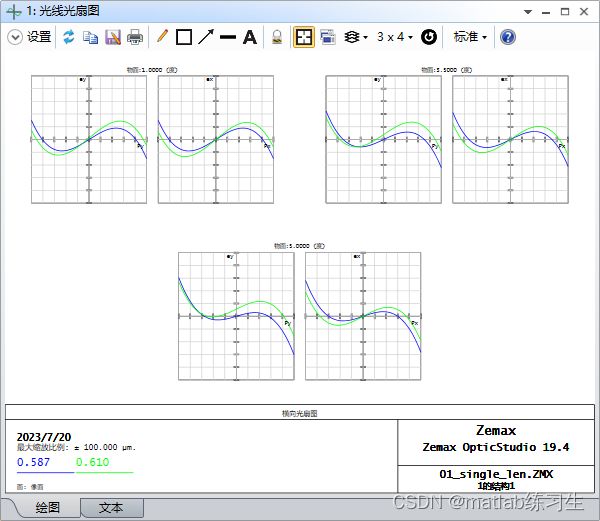
展示的就是三个视场、x\y轴、两个波长的光扇图
分成三组是三个视场
每组两张图分别对应x\y轴
不同颜色的曲线代表不同波长,具体的对应关系在左下角

在设置界面,可以设置图形的缩放和光线数,更贴近真实情况,缩放设置为0表示将产生一个适合的比例。
可以选择是否使用虚线区分不同波长,以及是否考虑渐晕光瞳等
如果用虚线区分,效果:

可以选择显示的视场、波长个数,以及子午、弧矢面对应的面

表面用来设置观察的位置
2.2OPD光扇图

OPD绘图的数据是光线的光程和主光线光程的差,横坐标为归一化的入瞳坐标
2.3光瞳像差光扇图

用实际光线在光阑面的交点和主波长近轴光线交点的差,在近轴光阑半径所占的百分比来做纵轴。
如果数值超过一定百分比们就要重新进行光线定位
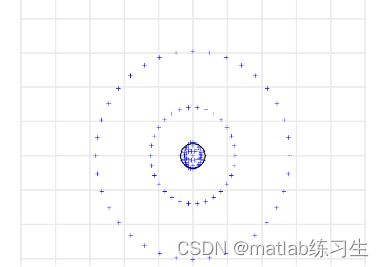
2.4点列图
对于实际的光学系统,光线不是理想的直线,成像也不会完美的会聚在像面上一个点。
一般而言,这是一个弥散的光斑,也就是点列图。
追迹光线越多,越能精确反映像面上的光强分布,结果越接近实际情况。
点列图中的点的分布可以近似地代表像点的能量分布,利用这些点的密集程度能够衡量系统成像质量的好坏。
根据点列图分布图形的形状也可以判断和了解系统的各种几何像差的影响,如是否有明显像散或慧差特征,几种色斑的分开程度如何等等。
艾里斑的半径约等于1.22*波长*F,F为F数
如果点列图的半径接近或小于艾里斑半径,系统已经接近或达到了衍射极限,此时点列图的结果不再适用于进行像质优化。
有两个重要参数:
几何最大半径值:参考光线点到最远光线交点的距离,即是以参考光线点为中心,包含所有光线的最大圆的半径。很显然,几何最大半径值只是反映像差的最大值,并不能真实反映光能的集中程度。
均方根值:每条光线交点与参考光线点的距离的平方,除以光线条数后再开方。均方根半径值反映了光能的集中程度,更能反映系统的成像质量。
以上图为例,
![]()
几何最大半径分别为86、103、107、108
均方根值分别为:54、51、48

在设置中可以调整光线密度(更精确反应实际情况)
波长:选择是否使用所有的波长

样式: 光瞳模式可以是方形(Square)、六角形(Hexapolar)或高频脉冲(Dithered)。这些方式与出现在光瞳面的光线的分布模式有关。
没有最好的模式,每一种模式都只能表示点列图的不同特性。

参考点:可以是主光线(Chief Ray)、重心(Centroid)或中心(Middle)。默认是以实际主光线为参考作为零像差点计算的。重心是用被追迹的光线分布定义的。中点定义使其最大光线误差在X和Y方向相等。

可以选择使用艾利斑(Airy Disk),将在图的每个点的周围画椭圆环表示艾利椭圆。
![]()
空心环的半径是1.22λF,它通常依赖于视场的位置和光瞳的方向。
设置用微米表示的最大比例尺。设置为0表示将产生一个适合的比例。
![]()
光线密度:若选择六角形或高频脉冲光瞳模式,光线密度决定了六角环形的数目;若选择方形模式,光线密度决定了光线数目的均方根。被追迹的光线越多,虽然计算时间会增加,但点列图的RMS越精确。
![]()
是否使用所有视场:

呈现面选择:

将用偏振光追迹每个需要的光线,通过系统的透过强度将被考虑。
![]()
其他类型:
离焦点列图:显示偏离最佳焦点位置某个距离的点列图,如下图:

简单理解,离焦就是成像面不在焦点处:

越远,越模糊
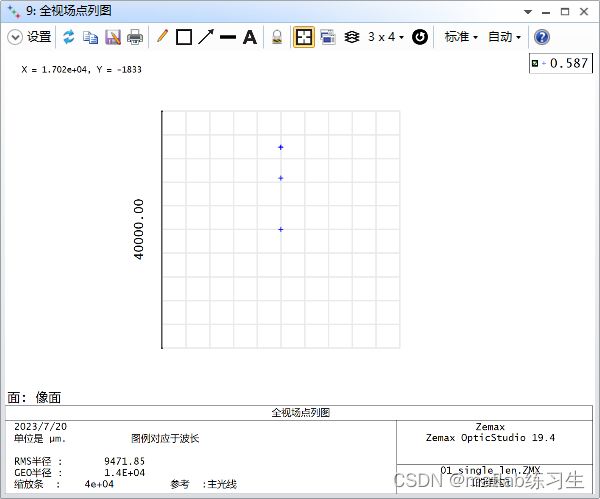
全视场(Full Field):与标准点列图是基本相同的,但所有的点是关于相同的参考点画出的,与每个视场位置各自的参考点是不同的。
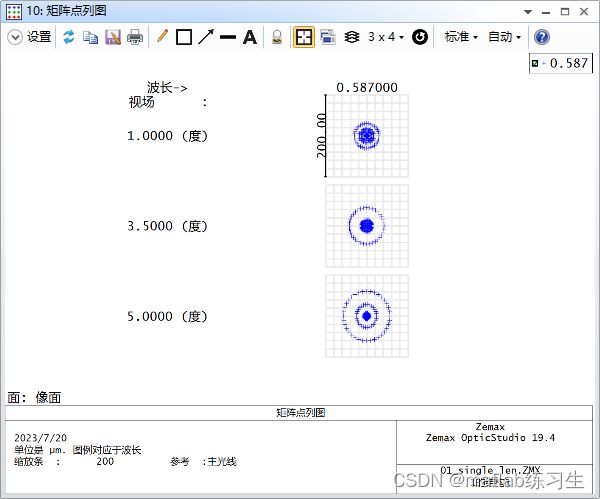
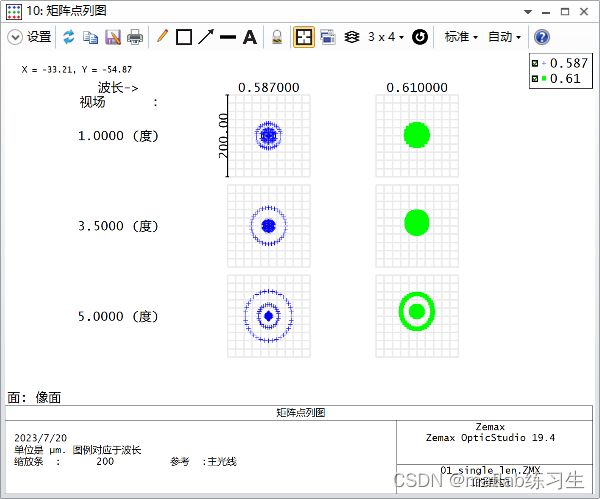
矩阵(Matrix):显示所有不同波长下所有视场的点列图
(这里只有一个波长,不然应该是一个矩阵)
添加一个波长:
配置矩阵(Configuration Matrix):也就是结构矩阵点列图,显示多重结构下的点列图

2.5调制传递函数
调制传递函数( Modulation Transfer Function,MTF )是用来形容光学系统成像质量的重要指标。
通过对光学系统像空间进行傅里叶变换,可以得到一张分析图表,来描述像面上对比度和空间频率之间的对应关系。
对比度:代表镜头表现光线亮和暗能力,对比度越高,图片内容越清楚
分辨率:代表着镜头对细节的表现能力
MTF:表示不同频率的正弦强度分布函数经光学系统成像后,对比度的衰减程度
透镜组的 MTF 图表,它提供了在透镜可以支持的最大空间频率下任意空间频率处的对比度:

x轴:线对/毫米,可以理解为分辨率
y轴:传递函数,可以理解为对比度
不同颜色的线:不同视场
波浪状:像场弯曲
实线:子午面
虚线:弧矢面
虚实线越接近,镜头色散和色差控制的越好
曲线越平滑越好,虚实线约接近越好,曲线与两坐标轴围成的面积越大越好。
2.6点扩散函数
FFT PSF:用快速傅里叶变换法计算衍射的点扩散函数,速度快,准确度低
Huygens PSF:用惠更斯子波直接积分法计算衍射点扩散函数,速度慢,准确度高
“点扩展函数描述成像系统对点源或点对象的响应。计算由物方某一点光源发出的由一个光学系统所成的衍射像的强度分布
在显微镜或望远镜中,物体的像可以通过将物体平面场表示为对二维脉冲函数的加权和,然后将像平面场表示为对这些脉冲函数的图像的加权和来计算,这就是所谓的叠加原理。”
点扩散函数 PSF https://blog.csdn.net/weixin_39750861/article/details/84556204
https://blog.csdn.net/weixin_39750861/article/details/84556204
2.7波前
波前图:显示波前像差
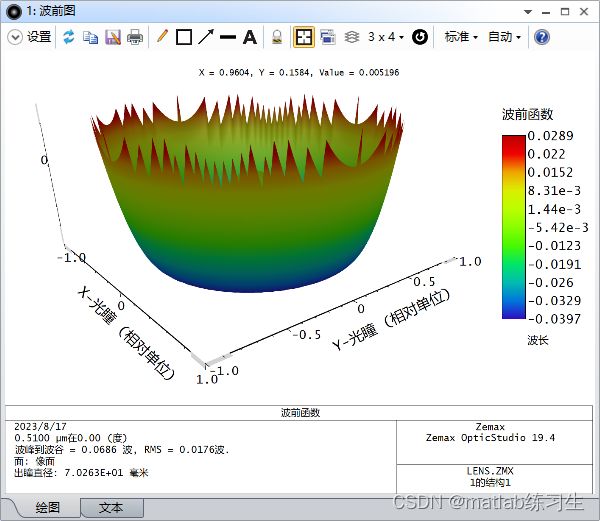
选择不同的表面:

可以读取具体的数值:

主要看两个,波峰到波谷(PV值),以及RMS值
干涉图:

傅科切口分析图:

刀口阴影法,检测波前的形状,用来测面型
刀口阴影法的实质是用刀口在球波面会聚点处切割光束,即可看到具有特定形状的阴影图,从而判断镜面或波前所存在的面形误差或波差。
刀口阴影法的特点是设备简单,灵活方便,非接触式测量,不受检验口径限制,加辅助镜和系统可以检验多种镜面和系统,但其只能做定性测量。
1) 在阴影图中,某区域的移动方向与刀口切割方向相同,则表示刀口所在位置在这一区域的光线交点之前。与刀口所在位置为中心的球面波相比较,这个区域是凸起的。
2) 在阴影图中,某区域阴影的移动方向与刀口的移动方向相反,则表示刀口所在位置在这一区域光线的交点之后,与刀口所在位置为中心的球面波相比较,这个区域是凹陷的。
3) 在阴影图中,某区域出现均匀的半暗的阴影,则表示刀口恰好位于这一区域的光线交点处。
以上原则可以用下面的口诀表示:焦前刀影同方向;焦后刀影对面来;焦点阴影一齐暗;左明右暗是高地;右明左暗是低谷。
刀口法http://www.interfero.com.cn/index.php?s=/Show/index/cid/23/id/54.html
2.8曲面图:
表面凹陷、表面相位
都能显示某个面对于通过的光线的相位改变情况。两者单位不同,前者为毫米,后者为周期
3、畸变图
3.1网格畸变与场曲畸变
网格畸变是XY两个方向上的几何畸变,是不同视场实际像高与近轴像高的偏差。
垂轴放大率在整个视场范围内不能保持常数
当一个有畸变的光学系统对一个方形的网状物体成像时,若δy>0,则主光线的交点高度y比理想像高y低,视场越大,低得越多,形成一啤酒桶形状的图像,故又称正畸变为桶形畸变;
若δy<0,则y比理想像高y高,视场越大,高得越多,形成一种枕头形的图像,故负畸变又称枕形畸变。

一般对于畸变值小于4%的光学系统,我们是可以接受的。特殊应用的镜头除外。
对畸变要求严格的光学系统往往采取对称或近似对称的结构形式。
畸变值的大小和光阑位置有关,如果在光阑两边的光学系统结构相互对称,且全系统的垂轴放大率为-1,则光学系统的垂轴像差为0.
网格畸变分析图可以解决非旋转对称和旋转对称系统的问题,但由于计算前提是预设像高与物空间视场角的正切成正比,在zemax中应用没有场曲/畸变分析图广泛;
这是因为当视场角大于等于90度时,该计算不能进行。
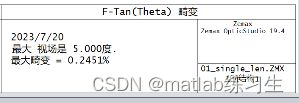
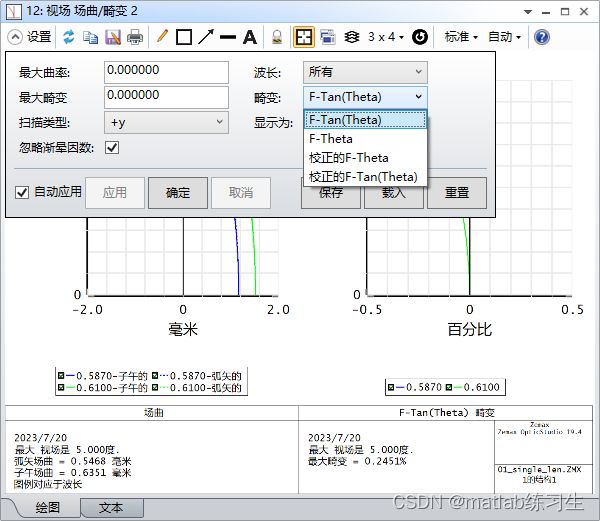
场曲/畸变分析图就没有这个限制

场曲/畸变分析图里面列举了四种畸变类型:F-tan畸变,F-theta畸变,校正的F-tan畸变,校正的F-theta畸变
计算相对畸变的公式为:
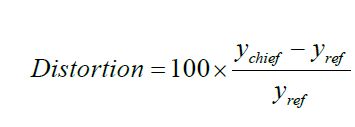
对于上述的四种畸变类型,区别仅在于公式右边的y_ref不同。
- F-tan畸变:yref等于系统焦距乘以视场角的tan;
- F-theta畸变:yref等于系统焦距乘以视场角;
- 校正的F-tan畸变:yref等于拟合焦距乘以视场角的tan;
- 校正的F-theta畸变:yref等于拟合焦距乘以视场角




常规镜头用F-tan畸变,也就是系统的默认值,像高和视场角的正切成线性关系
扫描镜头用F-theta畸变
就像前面说的,“场曲/畸变”分析图只适合旋转对称系统
T子午场曲,S弧矢场曲
通过场曲/畸变分析图还能读出子午、弧矢场曲
在图中也有用颜色区分不同的场曲:

横轴单位为centimeters厘米,纵轴最大视场为5度。
场曲曲线显示作为视场坐标函数的当前的焦平面或像平面到近轴焦面的距离
子午场曲数据是沿着Z轴测量的从当前所确定的聚焦面到近轴焦面的距离,并且是在子午(YZ 面)上测量的。
弧矢场曲数据测量的是在与子午面垂直的平面上测量的距离,示意图中的基线是在光轴上,曲线顶部代表最大视场(角度或高度)
4、物理光学

直接的光分布:
类似的还有高斯光束
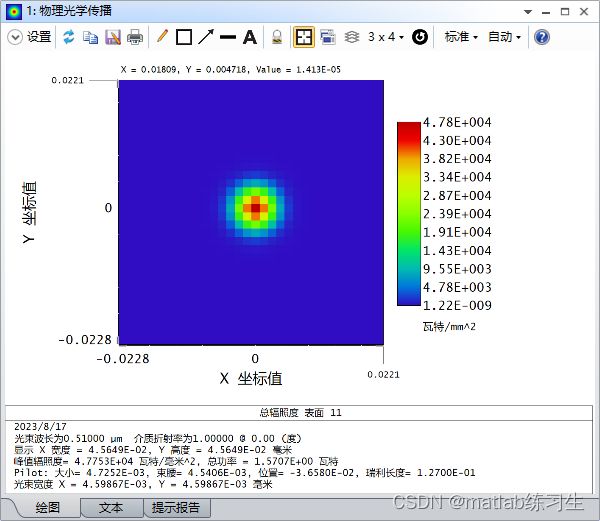
5、光的能量分布
几何法、线性/边缘响应、扩展光源、衍射法
如:几何法
用光线与像平面交点的方法来计算包围圆能量
衍射法:显示能量分布图。用离主光线或物点的像的重心的距离为函数的包围圆能量占总能量的百分比。
6、照度
计算相对照度,按照零视场的照度归一化

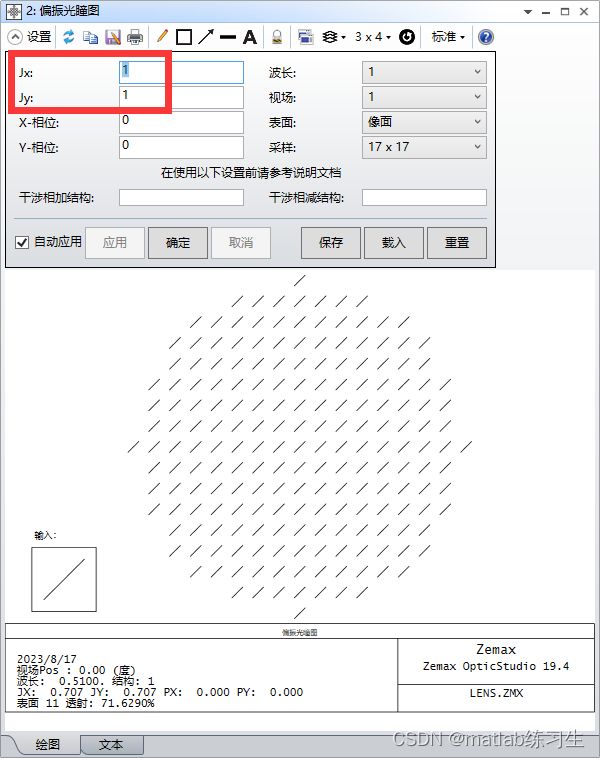
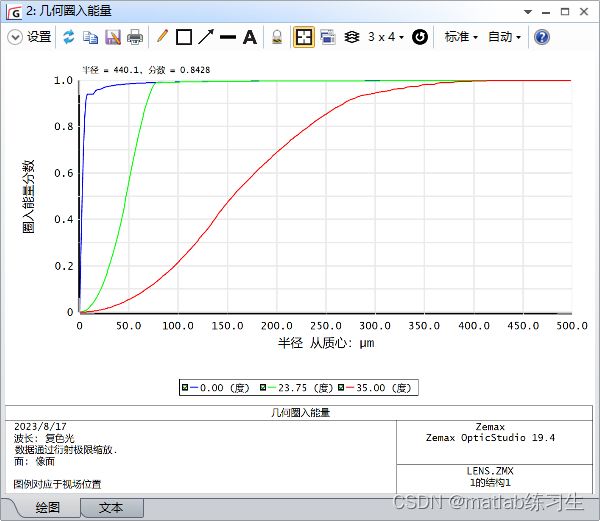
7、偏振
改变输入的偏振光观察输出光中不同偏振的光的分布