FreeRTOS知识及常用API函数
目录
1、简介
2、特点
3、三种任务调度方式
3.1 抢占式调度:
3.2 时间片调度:
3.3 协程式调度:
4、任务状态
5、常用API接口函数
1. 创建一个任务xTaskCreate()
2. 删除一个任务vTaskDelete()
3. 挂起任务vTaskSuspend()
4. 恢复被挂起任务vTaskResume()
5. 中断中恢复被挂起任务vTaskResumeFromISR()
6. 获取任务的状态eTaskGetState()
7. 任务中进入退出临界区
8. 中断中进入退出临界区
9. 关闭中断portDISABLE_INTERRUPTS()
10. 打开中断portENABLE_INTERRUPTS()
1、简介
RTOS全称为:Real Time OS,就是实时操作系统,强调的是:实时性,例如打游戏和回复信息,不需要等某一件事做完,可每间隔1ms(一个时间片时钟节拍),然后交替做这两件 事,因为速度很快,从宏观的意义上来看,类似同步执行!
2、特点
其有以下特点:①实现功能划分为多个任务;②延时函数不会空等待,会让出CPU的使用权给其他任务,即任务调度;③高优先级任务抢占低优先级任务;④每个任务都有自己的栈空间,用于保存局部变量以及任务的上下文信息。
3、三种任务调度方式
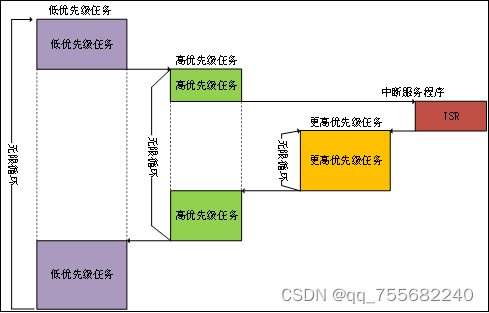
3.1 抢占式调度:
针对优先级不同的任务,每个任务都有一个优先级,优先级高的任务可以抢占优先级低的任务。

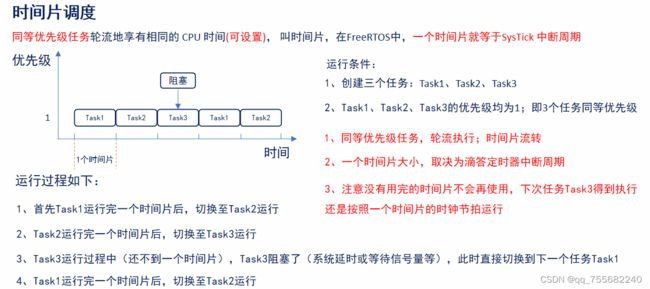
3.2 时间片调度:
针对优先级相同的任务,当多个任务的优先级相同时, 任务调度器会在每一次系统时钟节拍到的时候切换任务。
3.3 协程式调度:
当前执行任务将会一直运行,同时高优先级的任务不会抢占低优先级任务(不建议使用,因为官方已停止更新)。
4、任务状态
FreeRTOS中任务共存在4种状态:①运行态:正在执行的任务,该任务就处于运行态,注意在STM32中,同一时间仅一个任务处于运行态;②就绪态:如果该任务已经能够被执行,但当前还未被执行,那么该任务处于就绪态;③阻塞态:如果一个任务因延时或等待外部事件发生,那么这个任务就处于阻塞态;④挂起态:类似暂停,调用函数 vTaskSuspend() 进入挂起态,需要调用解挂函数vTaskResume() 才可以进入就绪态。
仅就绪态可转变成运行态,其他状态的任务想运行,必须先转变成就绪态。

5、常用API接口函数
注意:以下表格中的函数和参数信息是基于 FreeRTOS 版本 10.x 的情况,具体的版本可能会有差异。在使用这些函数时,请根据你所使用的 FreeRTOS 版本和相关文档进行确认。
1. 创建一个任务xTaskCreate()
osThreadStaticDef(myTask02, StartTask02, osPriorityNormal, 0, 128, myTask02Buffer, &myTask02ControlBlock);
myTask02Handle = xTaskCreate(osThread(myTask02), NULL);
2. 删除一个任务vTaskDelete()
//删除另外的任务
if(myTask02Handle != NULL){
vTaskDelete(myTask02Handle); //要删除的任务句柄
myTask02Handle=NULL; //清空
}
//删除本身任务
vTaskDelete(NULL);
myTask03Handle=NULL;
3. 挂起任务vTaskSuspend()
//挂起另外的任务
vTaskSuspend(myTask02Handle);
//挂起当前任务
vTaskSuspend(NULL);
4. 恢复被挂起任务vTaskResume()
vTaskResume(myTask02Handle);5. 中断中恢复被挂起任务vTaskResumeFromISR()
//注意:必须是单片机的中断回调函数中运行该API函数
//注意:该EXTI中断优先级不能大于某一个设置的阈值优先级
//例如EXTI端口触发中断回调函数
void HAL_EXTI_Callback(uint16_t GPIO_Pin){
if(GPIO_Pin==GPIO_PIN_9) {//判断哪个引脚触发外部中断
BaseType_t xYieldRequired;
xYieldRequired = vTaskResumeFromISR(myTask02Handle);//中断中恢复挂起任务
if(xYieldRequired == pdTRUE){//判断任务恢复后,是否需要进行任务切换
portYIELD_FROM_ISR(xYieldRequired );//任务切换
}
}
}
6. 获取任务的状态eTaskGetState()
/*
*eRunning: 运行态
*eReady : 就绪态
*eBlocked: 阻塞态
*eSuspended: 挂起态
*eDeleted: 已被删除
*eInvalid: 无效态
*/
//判断是否挂起态,挂起则恢复任务
if(eTaskGetState(myTask02Handle) == eSuspended){
vTaskResume(myTask02Handle);
}7. 任务中进入退出临界区
vtaskENTER_CRITICAL(); //进入临界区后,不会被别的高优先级任务而打断该任务
......
...... //可以做别的操作,而不被高优先级任务打断
......
vtaskEXIT_CRITICAL(); //退出临界区,别的高优先级任务就会打断这个任务
8. 中断中进入退出临界区
//注意:必须是单片机的中断回调函数中运行该API函数
//注意:该EXTI中断优先级不能大于某一个设置的阈值优先级
uint32_t save_status;
//例如EXTI端口触发中断回调函数
void HAL_EXTI_Callback(uint16_t GPIO_Pin){
if(GPIO_Pin==GPIO_PIN_9) {//判断哪个引脚触发外部中断
save_status = vtaskENTER_CRITICAL_FROM_ISR(); //中断级"进入"临界区
}
}
//另外的函数中
vtaskEXIT_CRITICAL_FROM_ISR(save_status); //中断级"退出"临界区9. 关闭中断portDISABLE_INTERRUPTS()
portDISABLE_INTERRUPTS(); //屏蔽优先级低于某一个阈值的中断10. 打开中断portENABLE_INTERRUPTS()
portENABLE_INTERRUPTS(); //打开优先级低于某一个阈值的中断| vTaskDelay | 延时任务执行 | vTaskDelay(xTicksToDelay) | 延时的时钟节拍数 |
| xSemaphoreCreateBinary |
创建二值信号量 | xSemaphoreCreateBinary(xQueue) | 信号量句柄 |
| xQueueCreate | 创建一个队列 | xQueueCreate(uxQueueLength, uxItemSize) | 队列长度、队列项大小 |
| xQueueSend | 发送数据到队列 | xQueueSend(xQueue, pvItemToQueue, xTicksToWait) | 队列句柄、要发送的数据指针、等待时间 |
| xQueueReceive | 从队列接收数据 | xQueueReceive(xQueue, pvBuffer, xTicksToWait) | 队列句柄、接收缓冲区指针、等待时间 |
| xEventGroupCreate | 创建事件组 | xEventGroupCreate() | 无 |
| xEventGroupSetBits | 设置事件组中的位 | xEventGroupSetBits(xEventGroup, uxBitsToSet) | 事件组句柄、要设置的位 |
| xEventGroupWaitBits | 等待事件组中的位 | xEventGroupWaitBits(xEventGroup, uxBitsToWaitFor, xClearOnExit, xWaitForAllBits, xTicksToWait) | 事件组句柄、等待的位、退出时是否清除、是否等待所有位、等待时间 |
| xTimerCreate | 创建一个定时器 | xTimerCreate(pcTimerName, xTimerPeriod, uxAutoReload, pvTimerID, pxCallbackFunction) | 定时器名称、定时周期、是否自动重载、定时器ID、回调函数指针 |
| xTimerStart | 启动定时器 | xTimerStart(xTimer, xTicksToWait) | 定时器句柄、等待时间 |