Python C# 通信2种路子
文章目录
- Pythonet
-
- 确保安装的是Python3.7
- 下载最新C#
- 下载的Pythonet 插件
- 环境变量名
- 模拟算法的Python 内容
- 处理自己的Python Package
- C# 里 Pythonnet 内容
- C# 运行结果
- Socket (TCP)
Pythonet
确保安装的是Python3.7
我是用的Anaconda的。确保Python3.7更新过:
pip install update
如果出现“permission denied”的错误,Windows用户可以使用以下解决:链接
下载最新C#
当前我用的是Microsoft Visual Studio Community 2019,版本 16.11.8。里面配备的.NET为4.8.04084 版本。
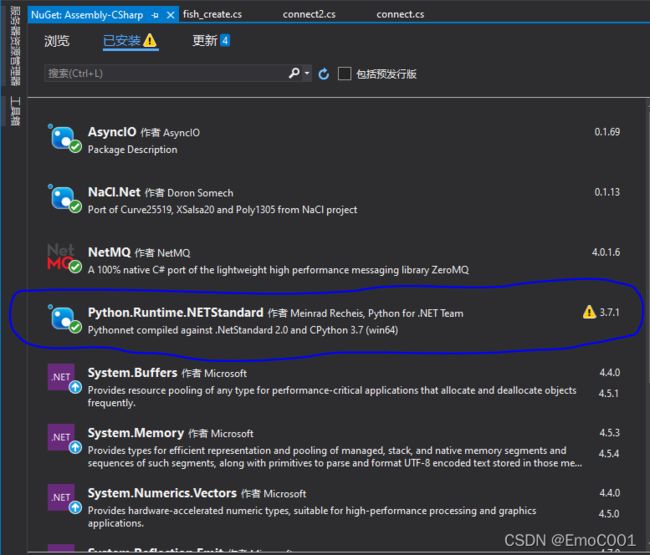
下载的Pythonet 插件
项目 > 管理NuGet程序包(N) > Pythonet.runtime.standard for python37
环境变量名
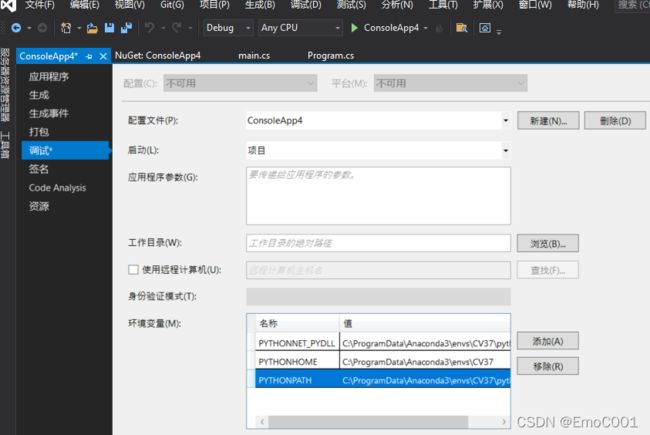
在Unity 项目内添加以下环境变量:
变量名称:PYTHONNET_PYDLL
变量名称:PYTHONHOME
变量名称:PYTHONPATH
模拟算法的Python 内容
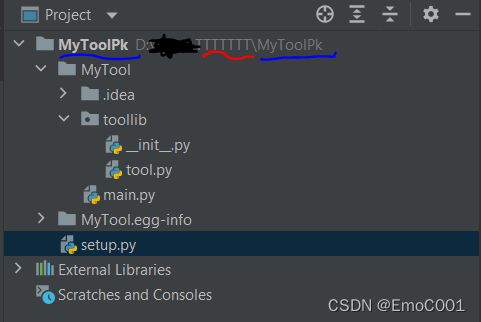
因为要放进module里,所以python 算法的引用部分要稍微严格一些,否则会容易找不到路径。从蓝色部分开始为外文件夹里面有三个内容:
- MyTool (主要的算法内容)
- MyTool.egg-info
- setup.py
main.py
from .toollib import tool
def main_method():
print("Hi")
mytool = tool.Tool()
mytool.makeTool()
tool.py
class Tool():
def __init__(self):
tool_name = "my toollib"
def makeTool(self):
print("Making toollib...")
init.py
用空的就行
处理自己的Python Package
setup.py
可自定义,这个文件要放在主要文件夹的外面。
from setuptools import setup, find_packages
setup(
name = 'MyTool',
version = '0.1.0',
packages = find_packages(),
install_requires = ['Cython',
'matplotlib>=3.2.2',
'numpy>=1.18.5',
'opencv-python>=4.1.2',
'Pillow',
'PyYAML>=5.3',
'scipy>=1.4.1',
'torch>=1.7.0',
'torchvision>=0.8.1',
'tqdm>=4.41.0',
'seaborn>=0.11.0',
'pandas'],
)
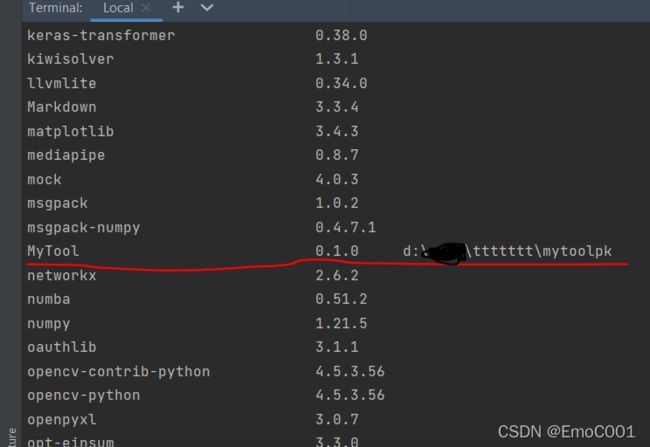
完成以上内容,开始将你的算法内容打包进你的pip list. run 以下内容的路径与setup.py的要在同一目录下。
cd MyToolPk
pip install -e .
安装后,用pip list检查
C# 里 Pythonnet 内容
using System;
using Python.Runtime;
using System.Collections.Generic;
namespace ConsoleApp4
{
class Program
{
static void Main(string[] args)
{
string xx = "3 4";
string[] res = xx.Split(" ");
int[] ans = new int[2];
for (int i = 0; i < xx.Length - 1; i++)
{
ans[i] = Int16.Parse(res[i]);
Console.WriteLine(ans[i]);
}
using (Py.GIL())
{
dynamic toollib = Py.Import("MyTool.main");
dynamic toolmethod = toollib.main_method();
Console.WriteLine(toolmethod);
Console.ReadKey();
}
}
}
}
C# 运行结果
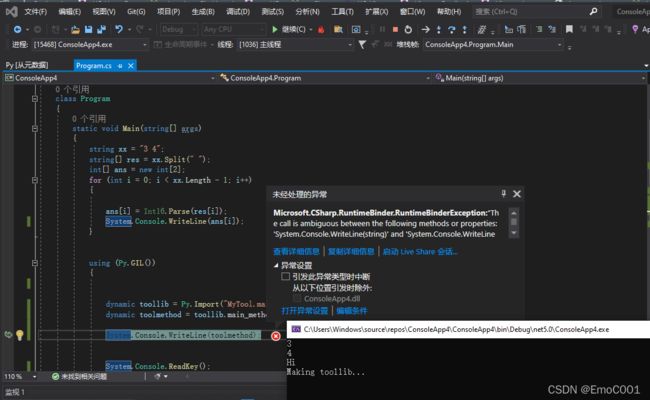
console 那个问题暂时就不解决了,如果有同志知道怎么解决欢迎留言学习。好啦,主要就是验证下Pythonet是否可用和到底怎么用。
Socket (TCP)
这个版本会比上面的简单,以及速度快。
import cv2
import socket
host, port = "127.0.0.1", 1234
sock = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
sock.connect((host, port))
cv2.namedWindow("frame")
with open("gt.txt", encoding='utf-8') as f:
coords = ""
ct = 0
for line in f:
tmp_items = line.split(',')
coords += " ".join(tmp_items[5:7])+" "
if tmp_items[1] == '5':
ct+=1
print(ct)
result = coords.strip()
sock.sendall(result.encode("UTF-8"))
receivedData = sock.recv(1024).decode("UTF-8")
f = cv2.imread(r"ZebraFish-04/imgT/" + tmp_items[0].zfill(6)+".jpg")
result_cc = list(map(int,result.split(" ")))
cv2.circle(f, (result_cc[0],result_cc[1]),10, (255, 255, 0),-1)
cv2.circle(f, (result_cc[2],result_cc[3]),10, (255, 255, 0),-1)
f = cv2.resize(f,(960, 480))
cv2.imshow("frame", f)
cv2.waitKey(1)
# print(coords)
# time.sleep(1)
coords = ""
using System;
using System.Collections.Generic;
using System.Net;
using System.Net.Sockets;
using System.Text;
using UnityEngine;
using System.Threading;
using System.Collections;
public class connect2 : MonoBehaviour
{
Thread mThread;
public string connectionIP = "127.0.0.1";
public int connectionPort = 1234;
IPAddress localAdd;
TcpListener listener;
TcpClient client;
Vector3 receivedPos = Vector3.zero;
public GameObject fish1;
public GameObject fish2;
Vector3 fish1_go = new Vector3();
Vector3 fish2_go = new Vector3();
int[] ans;
string[] res = new string[] { "1", "1" };
public List<GameObject> fishes;
public Queue msgq = new Queue();
bool running;
private void Update()
{
List<Vector3> coords = new List<Vector3>();
if (msgq.Count > 0)
{
//Debug.Log(_helloRequester.msgq.Dequeue().ToString() + " left:"+ _helloRequester.msgq.Count);
res = (msgq.Dequeue()).ToString().Split(',');
for (int i = 0; 2 * i < 2; i++)
{
Debug.Log("->>>>>" + (float.Parse(res[2 * i]) / 1400f) + ":----" + (-float.Parse(res[2 * i + 1]) / 1400f) + ":----" + 0f);
fishes[i].transform.localPosition = new Vector3(((float.Parse(res[2 * i])) / 1280f)-0.5f, (-float.Parse(res[2 * i + 1]) / 960f) + 0.7f, 0f); //X:2704 Y:1520
Debug.Log("Q.length:" + msgq.Count);
}
}
else{Debug.Log("null");}
}
private void Start()
{
fish1 = GameObject.Find("fish1");
fish2 = GameObject.Find("fish2");
//fish3 = GameObject.Find("fish3");
fish1_go = new Vector3(0f, 0f, 1f);
fish2_go = new Vector3(0f, 0f, 1f);
fishes = new List<GameObject> { fish1, fish2 };
//fish3_go = new Vector3(0f, 0f, 1f);
ans = new int[] { 0, 0 };
ThreadStart ts = new ThreadStart(GetInfo);
mThread = new Thread(ts);
mThread.Start();
}
void GetInfo()
{
localAdd = IPAddress.Parse(connectionIP);
listener = new TcpListener(IPAddress.Any, connectionPort);
listener.Start();
client = listener.AcceptTcpClient();
running = true;
while (running)
{
SendAndReceiveData();
}
listener.Stop();
}
void SendAndReceiveData()
{
NetworkStream nwStream = client.GetStream();
byte[] buffer = new byte[client.ReceiveBufferSize];
//---receiving Data from the Host----
int bytesRead = nwStream.Read(buffer, 0, client.ReceiveBufferSize); //Getting data in Bytes from Python
string dataReceived = Encoding.UTF8.GetString(buffer, 0, bytesRead); //Converting byte data to string
if (dataReceived != null)
{
Debug.Log(dataReceived);
msgq.Enqueue(dataReceived);
//---Sending Data to Host----
byte[] myWriteBuffer = Encoding.ASCII.GetBytes("LALALAL"); //Converting string to byte data
nwStream.Write(myWriteBuffer, 0, myWriteBuffer.Length); //Sending the data in Bytes to Python
}
}
public static Vector3 StringToVector3(string sVector)
{
// Remove the parentheses
if (sVector.StartsWith("(") && sVector.EndsWith(")"))
{
sVector = sVector.Substring(1, sVector.Length - 2);
}
// split the items
string[] sArray = sVector.Split(',');
// store as a Vector3
Vector3 result = new Vector3(
float.Parse(sArray[0]),
float.Parse(sArray[1]),
float.Parse(sArray[2]));
return result;
}
}