李沐深度学习记录2:10多层感知机
一.简要知识记录
x.numel():看向量或矩阵里元素个数
A.sum():向量或矩阵求和,axis参数可对某维度求和,keepdims参数设置是否保持维度不变
A.cumsum:axis参数设置沿某一维度计算矩阵累计和
x*y:向量的按元素乘法
torch.dot(x,y):向量的点乘(点积or内积),结果是标量。公式,向量a点积向量b=|a||b|cos两向量夹角。向量点积即x的转置与向量y相乘,即对应元素相乘相加得数值。
torch.sum(x*y):计算向量点积的另一方式,执行向量的按元素乘法得向量,再对向量求和。
torch.mul(A,x):两个变量对应元素相乘。A为矩阵时,x可以是一个数,也可以是向量(支持广播机制)。若A(m,n),x为向量时,x只能(1,n)或(m,1)即选择与矩阵A每行向量对应元素想乘或者与矩阵A每列向量对应元素想乘,显然(n,1)或(1,m)维度不符合形式。
torch.mv(A,X):矩阵向量积,矩阵乘以向量。
A*B:矩阵的按元素乘法,称为Hadamard积。
torch.mm(A,B):矩阵乘法。但是注意,高维矩阵(二维以上)不可以使用mm(),应当使用matmul().
torch.abs(x).sum():计算向量的L1范数,即先计算各项绝对值,再求和。
torch.norm(x):计算向量的L2范数。L2范数是向量元素平方和的平方根
torch.norm(A):类似于向量的L2范数,矩阵A的Frobenius范数是矩阵元素平方和的平方根。
梯度和等高线正交,梯度指向值变化最大的方向
1.线性回归:估计一个连续值
公式(对于单个样本,向量内积),y=<w,x>+b (<w,x>向量内积得标量) ;
公式(对于多个样本,矩阵乘法),y=w*x+b x维度[batchsize,m], w维度[m,1], b维度[1]是个标量,输出维度[batchsize,1]
损失函数,平方损失 ;
输出:输出只有一个连续值表预测
2.softmax回归:预测一个离散类别;设类别数n
公式(对多个样本):1)y=w*x+b;x维度[batchsize,m], w维度[m,n] ,b维度[1,n], 输出维度[batchsize,n]
2)y=softmax(o);o是1)的输出值,通过softmax将其转化为概率输出,即n个值和为1
损失函数;交叉熵( H(p,q)=求和-pi*log(qi) )常用于衡量两个概率的区别,一个是正确类别进行的一位有效编码,一个是2)的预测概率输出
输出:输出n个类别的概率预测
另,逻辑斯蒂回归是softmax回归二分类的一种特殊形式
3.单层感知机:二分类
公式(对于单个样本):o=硬sigmoid(<w,x>+b) 硬sigmoid(x)=1(x>0) or -1(otherwise)
损失函数:等价于使用批量大小为1的梯度下降,具体如下
l=max(0,-y<w,x>) 当预测值<w,x>与真实值y符号相同即均大于0或均小于0,该样本预测正确,此时-y<w,x>小于0,损失函数l=0
当预测值<w,x>与真实值y符号不同,该样本预测错误,此时-y<w,x>大于0,损失函数l=-y<w,x>
存在问题,无法解决XOR二分类问题
多层感知机-单分类即二分类
公式(对多个样本):h=sigmoid(w1*x+b1) 输入x维度(batchsize,n),隐藏层w1维度(n,m), b1维度(1,m), 隐藏层输出维度(batchsize,m)
o=w2*h+b2 输入h维度(batchsize,m),输出层w2维度(m,1), b2维度(1)标量,输出o维度(batchsize,1)
关于激活函数:sigmoid:[0,1] Tanh: [-1,1] ReLU: max(x,0) 常用ReLU,因为它没有指数运算,而指数计算很贵
多层感知机-多分类
公式(对多个样本):h=sigmoid(w1*x+b1) 输入x维度(batchsize,n),隐藏层w1维度(n,m), b1维度(1,m), 隐藏层输出维度(batchsize,m)
o=w2*h+b2 输入h维度(batchsize,m),输出层w2维度(m,k), b2维度(k,1),输出o维度(batchsize,k)
y=softmax(o) 通过softmax将k个值转化为概率
损失函数:交叉熵
超参数:隐藏层数;每个隐藏层的大小
另,多层感知机多分类与softmax回归多分类区别只是多了隐藏层部分
2.多层感知机从零开始实现
import torch
from torch import nn
from d2l import torch as d2l
#数据加载
batch_size=256
train_iter,test_iter=d2l.load_data_fashion_mnist(batch_size)
实现一个具有单隐藏层的多层感知机
#初始化模型参数
#注意对于隐藏层的宽度,常选择2的若干次幂作为层的宽度,可以使得计算更高效
num_inputs,num_outputs,num_hiddens=784,10,256
#nn.Parameter()是pytorch一个类,用于创建可训练的参数(权重和偏置),这些参数会在模型训练过程中自动更新
# w1=nn.Parameter(torch.normal(0,0.01,(num_inputs,num_hiddens),requires_grad=True)*0.01)
w1=nn.Parameter(torch.randn(num_inputs,num_hiddens,requires_grad=True)*0.01)
b1=nn.Parameter(torch.zeros(num_hiddens,requires_grad=True))
w2=nn.Parameter(torch.randn(num_hiddens,num_outputs,requires_grad=True)*0.01)
b2=nn.Parameter(torch.zeros(num_outputs,requires_grad=True))
params=[w1,b1,w2,b2]
#激活函数-实现ReLU函数
def relu(X):
a=torch.zeros_like(X) #torch.zeros_like生成和括号内变量维度一致的全是0的内容
return torch.max(X,a)
#模型
#忽略空间结构,需要使用reshape将每个二维图像转换为一个长度为num_inputs的向量
def net(X):
X=X.reshape((-1,num_inputs)) #(batchsize,1,28,28)->(batchsize,784)
H=relu(X@w1+b1) #X矩阵(batchsize,784),w1矩阵(784,256),@则为矩阵乘法得(batchsize,256),b1(1,256)
return (H@w2+b2) #H矩阵(batchsize,256),w1矩阵(256,10),@则为矩阵乘法得(batchsize,10),b2(1,10)
#损失函数
#计算softmax和交叉熵
loss=nn.CrossEntropyLoss(reduction='none') #不对损失求和或求平均,得到一个向量包含batchsize份损失,即每个样本的损失
#训练
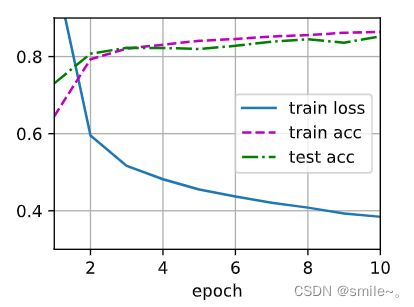
#由于多层感知机训练过程与softmax回归完全相同,因此可以直接调用d2l包的train_ch3函数
num_epochs,lr=10,0.1
updater=torch.optim.SGD(params,lr=lr)
d2l.train_ch3(net,train_iter,test_iter,loss,num_epochs,updater)
#在一些数据上应用模型
d2l.predict_ch3(net,test_iter)


三.多层感知机简介实现
import torch
from torch import nn
from d2l import torch as d2l
#加载数据
batch_size=256
train_iter,test_iter=d2l.load_data_fashion_mnist(batch_size)
#模型
#与softmax回归的简洁实现,唯一区别是添加了2个全连接层
#第一层隐藏层,包含256个隐藏单元,并使用ReLU激活函数。第二层是输出层
#nn.Flatten()除了第0维度batchsize保留,其余维度全部展平为一维向量
net=nn.Sequential(nn.Flatten(),
nn.Linear(784,256),
nn.ReLU(),
nn.Linear(256,10))
#参数初始化
#nn.Linear的weight和bias会自动初始化,这里使用init_weight只是不希望采用对weight的默认初始化,对bias采用默认初始化就可以
def init_weights(m):
if type(m)==nn.Linear:
nn.init.normal_(m.weight,std=0.01)
net.apply(init_weights);
#损失函数
loss=nn.CrossEntropyLoss(reduction='none')
#优化算法
trainer=torch.optim.SGD(net.parameters(),lr=lr)
#训练
num_epochs,lr=10,0.1
d2l.train_ch3(net,train_iter,test_iter,loss,num_epochs,trainer)