- 《互联网时代教师自主成长的模式研究》论文阅读与思考2
宁超群
2.第二部分教师自主成长的模式建构,实质上是对新网师底层逻辑的描述。你认为,新网师的培训模式与传统常见的培训模式有哪些区别?这些区别有什么意义或价值?读完第二部分后,你对新网师有哪些新的认识或理解?你认为新网师目前哪些方面做得好,哪些方面做得还不够?答:我认为新网师的培训模式与传统常见的培训模式有以下区别:(1)培训对象的参与动机不同。新网师学员的参与是自觉自愿、积极主动,而传统培训更多是被迫参与
- 【定位系列论文阅读】-Patch-NetVLAD: Multi-Scale Fusion of Locally-Global Descriptors for Place Recognition(一)
醉酒柴柴
论文阅读学习笔记
这里写目录标题概述研究内容Abstract第一段(介绍本文算法大致结构与优点)1.Introduction介绍第一段(介绍视觉位置识别的重要性)第二段(VPR的两种常见方法,本文方法结合了两种方法)第三段(本文贡献)第四段(为证明本文方法优越性,进行的测试以及比较)2.RelatedWork相关工作第一段(介绍早期与深度学习的全局图像描述符)第二段(介绍局部关键点描述符)第三段(局部描述符可以进一
- 论文阅读笔记(十九):YOLO9000: Better, Faster, Stronger
__Sunshine__
笔记YOLO9000detectionclassification
WeintroduceYOLO9000,astate-of-the-art,real-timeobjectdetectionsystemthatcandetectover9000objectcategories.FirstweproposevariousimprovementstotheYOLOdetectionmethod,bothnovelanddrawnfrompriorwork.Theim
- 论文阅读笔记: DINOv2: Learning Robust Visual Features without Supervision
小夏refresh
论文计算机视觉深度学习论文阅读笔记深度学习计算机视觉人工智能
DINOv2:LearningRobustVisualFeatureswithoutSupervision论文地址:https://arxiv.org/abs/2304.07193代码地址:https://github.com/facebookresearch/dinov2摘要大量数据上的预训练模型在NLP方面取得突破,为计算机视觉中的类似基础模型开辟了道路。这些模型可以通过生成通用视觉特征(即无
- 论文笔记—NDT-Transformer: Large-Scale 3D Point Cloud Localization using the Normal Distribution Transfor
入门打工人
笔记slam定位算法
论文笔记—NDT-Transformer:Large-Scale3DPointCloudLocalizationusingtheNormalDistributionTransformRepresentation文章摘要~~~~~~~在GPS挑战的环境中,自动驾驶对基于3D点云的地点识别有很高的要求,并且是基于激光雷达的SLAM系统的重要组成部分(即闭环检测)。本文提出了一种名为NDT-Transf
- 周四 2020-01-09 08:00 - 24:30 多云 02h10m
么得感情的日更机器
南昌。二〇二〇年一月九日基本科研[1]:1.论文阅读论文--二小时十分2.论文实现实验--小时3.数学SINS推导回顾--O分4.科研参考书【】1)的《》看0/0页-5.科研文档1)组织工作[1]:例会--英语能力[2]:1.听力--十分2.单词--五分3.口语--五分4.英语文档1)编程能力[2]:1.编程语言C语言--O分2.数据结构与算法C语言数据结构--O分3.编程参考书1)陈正冲的《C语
- 【论文阅读】Mamba:选择状态空间模型的线性时间序列建模(二)
syugyou
Mamba状态空间模型论文阅读
文章目录3.4一个简化的SSM结构3.5选择机制的性质3.5.1和门控机制的联系3.5.2选择机制的解释3.6额外的模型细节A讨论:选择机制C选择SSM的机制Mamba论文第一部分Mamba:选择状态空间模型的线性时间序列建模(一)3.4一个简化的SSM结构如同结构SSM,选择SSM是单独序列变换可以灵活地整合进神经网络。H3结构式最知名SSM结构地基础,其通常包括受线性注意力启发的和MLP交替地
- SAFEFL: MPC-friendly Framework for Private and Robust Federated Learning论文阅读笔记
慘綠青年627
论文阅读笔记深度学习
SAFEFL:MPC-friendlyFrameworkforPrivateandRobustFederatedLearning适用于私有和鲁棒联邦学习的MPC友好框架SAFEFL,这是一个利用安全多方计算(MPC)来评估联邦学习(FL)技术在防止隐私推断和中毒攻击方面的有效性和性能的框架。概述传统机器学习(ML):集中收集数据->隐私保护问题privacy-preservingML(PPML)采
- MixMAE(MixMIM):用于分层视觉变压器有效预训练的混合和掩码自编码器 论文阅读
皮卡丘ZPC
扩散模型阅读论文阅读
论文:MixMAE(arxiv.org)代码:Sense-X/MixMIM:MixMIM:MixedandMaskedImageModelingforEfficientVisualRepresentationLearning(github.com)摘要:本文提出MixMAE(MixedandmaskAutoEncoder),这是一种简单而有效的预训练方法,适用于各种层次视觉变压器。现有的分层视觉变
- 【论文阅读】LLM4CP: Adapting Large Language Models for Channel Prediction(2024)
Bosenya12
科研学习论文阅读语言模型人工智能信道预测时间序列
摘要Channelprediction(信道预测)isaneffectiveapproach(有效方法)forreducingthefeedback(减少反馈)orestimationoverhead(估计开销)inmassivemulti-inputmulti-output(大规模多输入输出)(m-MIMO)systems.However,existingchannelpredictionmet
- 【论文阅读】AugSteal: Advancing Model Steal With Data Augmentation in Active Learning Frameworks(2024)
Bosenya12
科研学习模型窃取论文阅读模型窃取模型提取数据增强主动学习
摘要Withtheproliferationof(随着)machinelearningmodels(机器学习模型)indiverseapplications,theissueofmodelsecurity(模型的安全问题)hasincreasinglybecomeafocalpoint(日益成为人们关注的焦点).Modelstealattacks(模型窃取攻击)cancausesignifican
- [论文笔记]Circle Loss: A Unified Perspective of Pair Similarity Optimization
愤怒的可乐
#文本匹配[论文]论文翻译/笔记自然语言处理论文阅读人工智能
引言为了理解CoSENT的loss,今天来读一下CircleLoss:AUnifiedPerspectiveofPairSimilarityOptimization。为了简单,下文中以翻译的口吻记录,比如替换"作者"为"我们"。这篇论文从对深度特征学习的成对相似度优化角度出发,旨在最大化同类之间的相似度sps_ps
- Bert系列:论文阅读Rethink Training of BERT Rerankers in Multi-Stage Retrieval Pipeline
凝眸伏笔
nlp论文阅读bertrerankerretrieval
一句话总结:提出LocalizedContrastiveEstimation(LCE),来优化检索排序。摘要预训练的深度语言模型(LM)在文本检索中表现出色。基于丰富的上下文匹配信息,深度LM微调重新排序器从候选集合中找出更为关联的内容。同时,深度lm也可以用来提高搜索索引,构建更好的召回。当前的reranker方法并不能完全探索到检索结果的效果。因此,本文提出了LocalizedContrast
- 【论文笔记】Multi-Task Learning as a Bargaining Game
xhyu61
机器学习学习笔记论文笔记论文阅读人工智能深度学习
Abstract本文将多任务学习中的梯度组合步骤视为一种讨价还价式博弈(bargaininggame),通过游戏,各个任务协商出共识梯度更新方向。在一定条件下,这种问题具有唯一解(NashBargainingSolution),可以作为多任务学习中的一种原则方法。本文提出Nash-MTL,推导了其收敛性的理论保证。1Introduction大部分MTL优化算法遵循一个通用方案。计算所有任务的梯度g
- [论文笔记] LLaVA
心心喵
论文笔记论文阅读
一、LLaVA论文中的主要工作和实验结果ExistingGap:之前的大部分工作都在做模态对齐,做图片的representationlearning,而没有针对ChatBot(多轮对话,指令理解)这种场景优化。Contribution:这篇工作已经在BLIP-2之后了,所以Image的理解能力不是LLaVA希望提升的重点,LLaVA是想提升多模态模型的Instruction-Followingab
- [论文笔记] LLM模型剪枝
心心喵
论文笔记论文阅读剪枝算法
AttentionIsAllYouNeedButYouDon’tNeedAllOfItForInferenceofLargeLanguageModelsLLaMA2在剪枝时,跳过ffn和跳过fulllayer的效果差不多。相比跳过ffn/fulllayer,跳过attentionlayer的影响会更小。跳过attentionlayer:7B/13B从100%参数剪枝到66%,平均指标只下降1.7~
- A Tutorial on Near-Field XL-MIMO Communications Towards 6G【论文阅读笔记】
Cc小跟班
【论文阅读】相关论文阅读笔记
此系列是本人阅读论文过程中的简单笔记,比较随意且具有严重的偏向性(偏向自己研究方向和感兴趣的),随缘分享,共同进步~论文主要内容:建立XL-MIMO模型,考虑NUSW信道和非平稳性;基于近场信道模型,分析性能(SNRscalinglaws,波束聚焦、速率、DoF)XL-MIMO设计问题:信道估计、波束码本、波束训练、DAMXL-MIMO信道特性变化:UPW➡NUSW空间平稳–>空间非平稳(可视区域
- 论文阅读:scMGCA----模型方法
dundunmm
论文阅读论文阅读人工智能聚类生物聚类单细胞聚类单细胞分析
Yu,Z.,Su,Y.,Lu,Y.etal.Topologicalidentificationandinterpretationforsingle-cellgeneregulationelucidationacrossmultipleplatformsusingscMGCA.NatCommun14,400(2023).https://doi.org/10.1038/s41467-023-36134
- 论文阅读:scHybridBERT
dundunmm
论文阅读机器学习人工智能神经网络深度学习单细胞基因测序
ZhangWei,WuChenjun,XingFeiyang,JiangMingfeng,ZhangYixuan,LiuQi,ShiZhuoxing,DaiQi,scHybridBERT:integratinggeneregulationandcellgraphforspatiotemporaldynamicsinsingle-cellclustering,BriefingsinBioinform
- 【论文阅读】Purloining Deep Learning Models Developed for an Ultrasound Scanner to a Competitor Machine
Bosenya12
科研学习模型窃取论文阅读深度学习人工智能模型安全
TheArtoftheSteal:PurloiningDeepLearningModelsDevelopedforanUltrasoundScannertoaCompetitorMachine(2024)摘要Atransferfunctionapproach(传递函数方法)hasrecentlyproveneffectiveforcalibratingdeeplearning(DL)algorit
- 《Motion Forecasting with Dual Consistency and Multi-Pseudo-Target Supervision》论文阅读之DCMS
山水之间2018
无人驾驶PaperReading大数据轨迹预测自动驾驶人工智能
目录摘要1简介2相关工作3.方法3.1结构3.2双重一致性约束3.3多伪目标监督3.4学习4实验4.1实验装置4.2实验结果4.3消融研究4.4泛化能力5限制6结论DCMS:具有双重一致性和多伪目标监督的运动预测香港科技大学暂无代码。摘要我们提出了一种具有双重一致性约束和多伪目标监督的运动预测新框架。运动预测任务通过结合过去的空间和时间信息来预测车辆的未来轨迹。DCMS的一个关键设计是提出双重一致
- 【论文笔记】Training language models to follow instructions with human feedback B部分
Ctrl+Alt+L
大模型论文整理论文笔记论文阅读语言模型人工智能自然语言处理
TraininglanguagemodelstofollowinstructionswithhumanfeedbackB部分回顾一下第一代GPT-1:设计思路是“海量无标记文本进行无监督预训练+少量有标签文本有监督微调”范式;模型架构是基于Transformer的叠加解码器(掩码自注意力机制、残差、Layernorm);下游各种具体任务的适应是通过在模型架构的输出后增加线性权重WyW_{y}Wy实
- 时序预测相关论文阅读笔记
能力越小责任越小YA
论文阅读笔记时序预测Transformer
笔记链接:【有道云笔记】读论文(记录)https://note.youdao.com/s/52ugLbot用于个人学习记录。
- 【论文阅读|cryoET】本周粗读汇总
吃吃今天努力学习了吗
冷冻电镜三维重建论文阅读
论文1:CryoDRGN-ET:深度重建生成网络以可视化细胞内动态生物分子Abstract虽然冷冻电子断层扫描可以以分子分辨率揭示结构,但图像处理算法仍然是解决原位生物分子结构异质性的瓶颈。本文介绍CryoDRGN-ET用于cryoET断层图的异质重建。CryoDRGN-ET直接从子断层扫描倾斜系列图像中学习三维密度图的深度生成模型,并且可以捕获成分和构象不同的状态。通过原位恢复肺炎支原体核糖体中
- Your Diffusion Model is Secretly a Zero-Shot Classifier论文阅读笔记
Rising_Flashlight
论文阅读笔记计算机视觉
YourDiffusionModelisSecretlyaZero-ShotClassifier论文阅读笔记这篇文章我感觉在智源大会上听到无数个大佬讨论,包括OpenAISora团队负责人,谢赛宁,好像还有杨植麟。虽然这个文章好像似乎被引量不是特别高,但是和AI甚至人类理解很本质的问题很相关,即是不是要通过生成来构建理解的问题,文章的做法也很巧妙,感觉是一些学者灵机一动的产物,好好学习一个!摘要这
- 【论文阅读】QUEEN: Query Unlearning against Model Extraction(2024)
Bosenya12
科研学习模型窃取论文阅读提取攻击模型安全
摘要Modelextractionattacks(模型提取攻击)currentlyposeanon-negligiblethreat(不可忽视的威胁)tothesecurity(安全性)andprivacy(隐私性)ofdeeplearningmodels.Byqueryingthemodelwithasmalldataset(通过小数据集查询模型)andusingthequeryresultsa
- 【论文阅读33】Deep learning optoacoustic tomography with sparse data
弹伦琴的雷登
【论文阅读系列】人工智能深度学习论文阅读图像处理
Deeplearningoptoacoustictomographywithsparsedata论文题目:基于稀疏数据的深度学习光声断层扫描论文链接:Deeplearningoptoacoustictomographywithsparsedata|NatureMachineIntelligence代码链接:GitHub-ndavoudi/sparse_artefact_unet数据链接:Data发
- 【论文笔记】:LAYN:用于小目标检测的轻量级多尺度注意力YOLOv8网络
hhhhhhkkkyyy
论文阅读目标检测YOLO
背景针对嵌入式设备对目标检测算法的需求,大多数主流目标检测框架目前缺乏针对小目标的具体改进,然后提出的一种轻量级多尺度注意力YOLOv8小目标检测算法。小目标检测精度低的原因随着网络在训练过程中的加深,检测到的目标容易丢失边缘信息和灰度信息等。获得高级语义信息也较少,图像中可能存在一些噪声信息,误导训练网络学习不正确的特征。映射到原始图像的感受野的大小。当感受野相对较小时,空间结构特征保留较多,但
- 激光SLAM--(8) LeGO-LOAM论文笔记
lonely-stone
slam激光SLAM论文阅读
论文标题:LeGO-LOAM:LightweightandGround-OptimizedLidarOdometryandMappingonVariableTerrain应用在可变地形场景的轻量级的、并利用地面优化的LOAMABSTRACT轻量级的、基于地面优化的LOAM实时进行六自由度位姿估计,应用在地面的车辆上。强调应用在地面车辆上是因为在这里面要求雷达必须水平安装,而像LOAM和LIO-SA
- 论文阅读瞎记(四) Cascade R-CNN: Delving into High Quality Object Detection 2017
码大哥
深度学习人工智能
概述在物体检测中1,IOU阈值被用于判定正负样本。在低IOU阈值比如0.5的状态下训练模型经常产生噪音预测,然而检测效果会随着IOU增加而降低。两个主要因素:1.训练时的过拟合,正样本指数消失2.检测器最优IOU与输入假设的不匹配。一个单阶段的物体检测器CascadeR-CNN被提出用于解决这些问题。网络由一个检测序列组成,这些序列训练时会伴随IOU增长从而对FP样本更加有选择性地判别。检测器一个
- html页面js获取参数值
0624chenhong
html
1.js获取参数值js
function GetQueryString(name)
{
var reg = new RegExp("(^|&)"+ name +"=([^&]*)(&|$)");
var r = windo
- MongoDB 在多线程高并发下的问题
BigCat2013
mongodbDB高并发重复数据
最近项目用到 MongoDB , 主要是一些读取数据及改状态位的操作. 因为是结合了最近流行的 Storm进行大数据的分析处理,并将分析结果插入Vertica数据库,所以在多线程高并发的情境下, 会发现 Vertica 数据库中有部分重复的数据. 这到底是什么原因导致的呢?笔者开始也是一筹莫 展,重复去看 MongoDB 的 API , 终于有了新发现 :
com.mongodb.DB 这个类有
- c++ 用类模版实现链表(c++语言程序设计第四版示例代码)
CrazyMizzz
数据结构C++
#include<iostream>
#include<cassert>
using namespace std;
template<class T>
class Node
{
private:
Node<T> * next;
public:
T data;
- 最近情况
麦田的设计者
感慨考试生活
在五月黄梅天的岁月里,一年两次的软考又要开始了。到目前为止,我已经考了多达三次的软考,最后的结果就是通过了初级考试(程序员)。人啊,就是不满足,考了初级就希望考中级,于是,这学期我就报考了中级,明天就要考试。感觉机会不大,期待奇迹发生吧。这个学期忙于练车,写项目,反正最后是一团糟。后天还要考试科目二。这个星期真的是很艰难的一周,希望能快点度过。
- linux系统中用pkill踢出在线登录用户
被触发
linux
由于linux服务器允许多用户登录,公司很多人知道密码,工作造成一定的障碍所以需要有时踢出指定的用户
1/#who 查出当前有那些终端登录(用 w 命令更详细)
# who
root pts/0 2010-10-28 09:36 (192
- 仿QQ聊天第二版
肆无忌惮_
qq
在第一版之上的改进内容:
第一版链接:
http://479001499.iteye.com/admin/blogs/2100893
用map存起来号码对应的聊天窗口对象,解决私聊的时候所有消息发到一个窗口的问题.
增加ViewInfo类,这个是信息预览的窗口,如果是自己的信息,则可以进行编辑.
信息修改后上传至服务器再告诉所有用户,自己的窗口
- java读取配置文件
知了ing
1,java读取.properties配置文件
InputStream in;
try {
in = test.class.getClassLoader().getResourceAsStream("config/ipnetOracle.properties");//配置文件的路径
Properties p = new Properties()
- __attribute__ 你知多少?
矮蛋蛋
C++gcc
原文地址:
http://www.cnblogs.com/astwish/p/3460618.html
GNU C 的一大特色就是__attribute__ 机制。__attribute__ 可以设置函数属性(Function Attribute )、变量属性(Variable Attribute )和类型属性(Type Attribute )。
__attribute__ 书写特征是:
- jsoup使用笔记
alleni123
java爬虫JSoup
<dependency>
<groupId>org.jsoup</groupId>
<artifactId>jsoup</artifactId>
<version>1.7.3</version>
</dependency>
2014/08/28
今天遇到这种形式,
- JAVA中的集合 Collectio 和Map的简单使用及方法
百合不是茶
listmapset
List ,set ,map的使用方法和区别
java容器类类库的用途是保存对象,并将其分为两个概念:
Collection集合:一个独立的序列,这些序列都服从一条或多条规则;List必须按顺序保存元素 ,set不能重复元素;Queue按照排队规则来确定对象产生的顺序(通常与他们被插入的
- 杀LINUX的JOB进程
bijian1013
linuxunix
今天发现数据库一个JOB一直在执行,都执行了好几个小时还在执行,所以想办法给删除掉
系统环境:
ORACLE 10G
Linux操作系统
操作步骤如下:
第一步.查询出来那个job在运行,找个对应的SID字段
select * from dba_jobs_running--找到job对应的sid
&n
- Spring AOP详解
bijian1013
javaspringAOP
最近项目中遇到了以下几点需求,仔细思考之后,觉得采用AOP来解决。一方面是为了以更加灵活的方式来解决问题,另一方面是借此机会深入学习Spring AOP相关的内容。例如,以下需求不用AOP肯定也能解决,至于是否牵强附会,仁者见仁智者见智。
1.对部分函数的调用进行日志记录,用于观察特定问题在运行过程中的函数调用
- [Gson六]Gson类型适配器(TypeAdapter)
bit1129
Adapter
TypeAdapter的使用动机
Gson在序列化和反序列化时,默认情况下,是按照POJO类的字段属性名和JSON串键进行一一映射匹配,然后把JSON串的键对应的值转换成POJO相同字段对应的值,反之亦然,在这个过程中有一个JSON串Key对应的Value和对象之间如何转换(序列化/反序列化)的问题。
以Date为例,在序列化和反序列化时,Gson默认使用java.
- 【spark八十七】给定Driver Program, 如何判断哪些代码在Driver运行,哪些代码在Worker上执行
bit1129
driver
Driver Program是用户编写的提交给Spark集群执行的application,它包含两部分
作为驱动: Driver与Master、Worker协作完成application进程的启动、DAG划分、计算任务封装、计算任务分发到各个计算节点(Worker)、计算资源的分配等。
计算逻辑本身,当计算任务在Worker执行时,执行计算逻辑完成application的计算任务
- nginx 经验总结
ronin47
nginx 总结
深感nginx的强大,只学了皮毛,把学下的记录。
获取Header 信息,一般是以$http_XX(XX是小写)
获取body,通过接口,再展开,根据K取V
获取uri,以$arg_XX
&n
- 轩辕互动-1.求三个整数中第二大的数2.整型数组的平衡点
bylijinnan
数组
import java.util.ArrayList;
import java.util.Arrays;
import java.util.List;
public class ExoWeb {
public static void main(String[] args) {
ExoWeb ew=new ExoWeb();
System.out.pri
- Netty源码学习-Java-NIO-Reactor
bylijinnan
java多线程netty
Netty里面采用了NIO-based Reactor Pattern
了解这个模式对学习Netty非常有帮助
参考以下两篇文章:
http://jeewanthad.blogspot.com/2013/02/reactor-pattern-explained-part-1.html
http://gee.cs.oswego.edu/dl/cpjslides/nio.pdf
- AOP通俗理解
cngolon
springAOP
1.我所知道的aop 初看aop,上来就是一大堆术语,而且还有个拉风的名字,面向切面编程,都说是OOP的一种有益补充等等。一下子让你不知所措,心想着:怪不得很多人都和 我说aop多难多难。当我看进去以后,我才发现:它就是一些java基础上的朴实无华的应用,包括ioc,包括许许多多这样的名词,都是万变不离其宗而 已。 2.为什么用aop&nb
- cursor variable 实例
ctrain
variable
create or replace procedure proc_test01
as
type emp_row is record(
empno emp.empno%type,
ename emp.ename%type,
job emp.job%type,
mgr emp.mgr%type,
hiberdate emp.hiredate%type,
sal emp.sal%t
- shell报bash: service: command not found解决方法
daizj
linuxshellservicejps
今天在执行一个脚本时,本来是想在脚本中启动hdfs和hive等程序,可以在执行到service hive-server start等启动服务的命令时会报错,最终解决方法记录一下:
脚本报错如下:
./olap_quick_intall.sh: line 57: service: command not found
./olap_quick_intall.sh: line 59
- 40个迹象表明你还是PHP菜鸟
dcj3sjt126com
设计模式PHP正则表达式oop
你是PHP菜鸟,如果你:1. 不会利用如phpDoc 这样的工具来恰当地注释你的代码2. 对优秀的集成开发环境如Zend Studio 或Eclipse PDT 视而不见3. 从未用过任何形式的版本控制系统,如Subclipse4. 不采用某种编码与命名标准 ,以及通用约定,不能在项目开发周期里贯彻落实5. 不使用统一开发方式6. 不转换(或)也不验证某些输入或SQL查询串(译注:参考PHP相关函
- Android逐帧动画的实现
dcj3sjt126com
android
一、代码实现:
private ImageView iv;
private AnimationDrawable ad;
@Override
protected void onCreate(Bundle savedInstanceState)
{
super.onCreate(savedInstanceState);
setContentView(R.layout
- java远程调用linux的命令或者脚本
eksliang
linuxganymed-ssh2
转载请出自出处:
http://eksliang.iteye.com/blog/2105862
Java通过SSH2协议执行远程Shell脚本(ganymed-ssh2-build210.jar)
使用步骤如下:
1.导包
官网下载:
http://www.ganymed.ethz.ch/ssh2/
ma
- adb端口被占用问题
gqdy365
adb
最近重新安装的电脑,配置了新环境,老是出现:
adb server is out of date. killing...
ADB server didn't ACK
* failed to start daemon *
百度了一下,说是端口被占用,我开个eclipse,然后打开cmd,就提示这个,很烦人。
一个比较彻底的解决办法就是修改
- ASP.NET使用FileUpload上传文件
hvt
.netC#hovertreeasp.netwebform
前台代码:
<asp:FileUpload ID="fuKeleyi" runat="server" />
<asp:Button ID="BtnUp" runat="server" onclick="BtnUp_Click" Text="上 传" />
- 代码之谜(四)- 浮点数(从惊讶到思考)
justjavac
浮点数精度代码之谜IEEE
在『代码之谜』系列的前几篇文章中,很多次出现了浮点数。 浮点数在很多编程语言中被称为简单数据类型,其实,浮点数比起那些复杂数据类型(比如字符串)来说, 一点都不简单。
单单是说明 IEEE浮点数 就可以写一本书了,我将用几篇博文来简单的说说我所理解的浮点数,算是抛砖引玉吧。 一次面试
记得多年前我招聘 Java 程序员时的一次关于浮点数、二分法、编码的面试, 多年以后,他已经称为了一名很出色的
- 数据结构随记_1
lx.asymmetric
数据结构笔记
第一章
1.数据结构包括数据的
逻辑结构、数据的物理/存储结构和数据的逻辑关系这三个方面的内容。 2.数据的存储结构可用四种基本的存储方法表示,它们分别是
顺序存储、链式存储 、索引存储 和 散列存储。 3.数据运算最常用的有五种,分别是
查找/检索、排序、插入、删除、修改。 4.算法主要有以下五个特性:
输入、输出、可行性、确定性和有穷性。 5.算法分析的
- linux的会话和进程组
网络接口
linux
会话: 一个或多个进程组。起于用户登录,终止于用户退出。此期间所有进程都属于这个会话期。会话首进程:调用setsid创建会话的进程1.规定组长进程不能调用setsid,因为调用setsid后,调用进程会成为新的进程组的组长进程.如何保证? 先调用fork,然后终止父进程,此时由于子进程的进程组ID为父进程的进程组ID,而子进程的ID是重新分配的,所以保证子进程不会是进程组长,从而子进程可以调用se
- 二维数组 元素的连续求解
1140566087
二维数组ACM
import java.util.HashMap;
public class Title {
public static void main(String[] args){
f();
}
// 二位数组的应用
//12、二维数组中,哪一行或哪一列的连续存放的0的个数最多,是几个0。注意,是“连续”。
public static void f(){
- 也谈什么时候Java比C++快
windshome
javaC++
刚打开iteye就看到这个标题“Java什么时候比C++快”,觉得很好笑。
你要比,就比同等水平的基础上的相比,笨蛋写得C代码和C++代码,去和高手写的Java代码比效率,有什么意义呢?
我是写密码算法的,深刻知道算法C和C++实现和Java实现之间的效率差,甚至也比对过C代码和汇编代码的效率差,计算机是个死的东西,再怎么优化,Java也就是和C




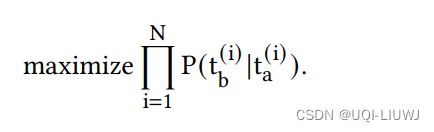
 表示的采样轨迹,N 表示采样轨迹的数量
表示的采样轨迹,N 表示采样轨迹的数量
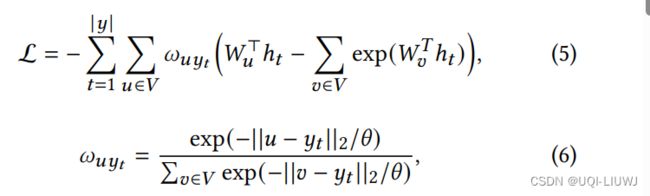
 是将 ht 投影到单元格的投影矩阵,下标u表示第u行
是将 ht 投影到单元格的投影矩阵,下标u表示第u行 是在解码目标yt 时单元格u 的空间接近性权重
是在解码目标yt 时单元格u 的空间接近性权重 表示单元格中心坐标之间的距离
表示单元格中心坐标之间的距离