激光雷达原理介绍

激光雷达的工作原理
激光雷达根据测量原理可以分为三角法激光雷达、脉冲法激光雷达、相干法激光雷达。本文我们只针对脉冲法测距的激光雷达做分析。
基于脉冲法的激光雷达利用光速测距。激光发射器发射激光脉冲,计时器记录发射时间;脉冲经物体反射后由接收器接受,计时器记录接受时间;时间差乘上光速即得到距离的两倍。用此方法来衡量雷达到障碍物之间的距离。
激光雷达系统组成
发射单元:激光器、发射光学系统,发射激光束探测信号;
接收单元:接收光学系统、光学虑光装置、光电探测器。接收反射的激光信号即回波信号;
控制单元:控制器、逻辑电路。控制激光激发、信号接收及系统工作模式;
信号处理单元:信号处理、数据校准与输出。光电转换,信号分析,数据获取;

激光雷达的优点:
1. 具有很高的分辨率
2. 抗干扰能力强
3. 获取的信息量丰富
4. 可全天候工作
激光雷达的不足:
1. 受天气和环境影响(烟雾、粉尘、雨雪、沙尘等)
2. 价格较贵,大部分产品处于万元级别
根据激光雷达的特性,与自动驾驶中其他常用的传感器对比如下:

激光雷达性能指标
在自动驾驶中,激光雷达常用于检测车辆四周FOV范围内的物体和道路特征,输出其产生的点云位置、特征反射率、运动属性等。
激光雷达的主要性能指标有激光波长、测量距离、测量精度、扫描频率、角分辨率、视场角、激光线束、安全等级、出点率、输出参数、IP防护等级、功率、供电电压、使用寿命等。如下图所示:
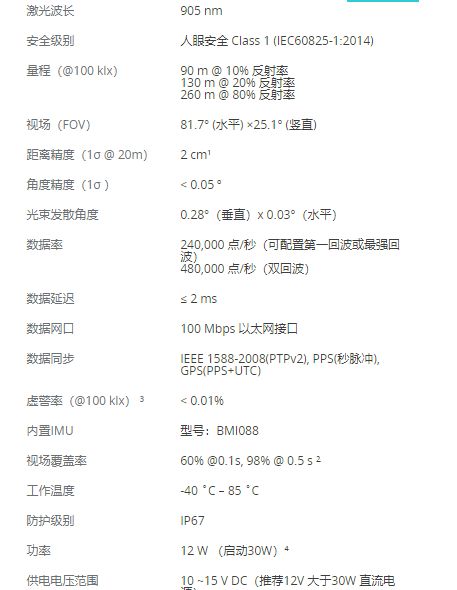
激光波长:目前市场上激光雷达最常用的波长是905nm和1550 nm。1550nm波长激光雷达传感器可以以更高的功率运行,以提高探测范围,同时对于雨雾的穿透力更强。905nm的主要优点是硅在该波长处吸收光子,而硅基光电探测器通常比探测1550 nm光所需的铟镓砷(InGaAs)近红外探测器便宜。
测量距离:激光雷达所标称的距离大多以90%反光率的漫反射物体(如白纸)作为测试基准。激光雷达的测距与目标的反射率相关。目标的反射率越高则测量的距离越远,目标的反射率越低则测量的距离越近。因此在查看激光雷达的探测距离时要知道该测量距离是目标反射率为多少时的探测距离。
测距精度:指测量一定数量后得出的真实值,是与真实一致性的度,重复精度也叫再现性或可重复性,是用于表示多次测量得到同一结果的可能性的量。一般测绘级的激光传感器测量精度都在1cm左右。
扫描频率:一秒内进行多少次测距输出。较高的扫描频率可以确保安装激光雷达的机器人实现较快速度的运动,并且保证地图构建的质量。但要提高扫描频率并不只是简单的加速激光雷达内部扫描电机旋转这么简单,对应的需要提高测距采样率。否则当采样频率固定的情况下,更快的扫描速度只会降低角分辨率。
角分辨率:角分辨率是扫描仪分辨目标的能力,测角分辨率越小,则表明能够分辨的目标越小,这样测量出的点云数据就越细腻。包括垂直分辨率和水平分辨率,水平方向上由电机带动,所以水平分辨率可以做得很高。一般可以做到0.01度级别。垂直分辨率是与发射器几何大小相关,也与其排布有关系,就是相邻两个发射器间隔做得越小,垂直分辨率也就会越小。垂直分辨率为0.1~1度的级别。
视场角大小:指激光束通过扫描装置所能达到的最大角度范围,包括水平视场角和垂直视场角。垂直视场角一般在30°~50°之间,机械式的水平视场角一般是360°,固态式水平视场角一般在80~120°之间。
雷达线束:常见的激光雷达的线束有16线、32线、64线等。多线激光雷达就是通过多个激光发射器在上的分布,通过电机的旋转形成多条线束的扫描。理论上讲,线束越多、越密,对环境描述就更加充分。
安全等级:激光雷达的安全等级是否满足Class 1,需要考虑特定波长的激光产品在完全工作时间内的激光输出功率,即激光辐射的安全性是波长、输出功率,和激光辐射时间的综合作用的结果。
激光雷达的分类
基于TOF法的激光雷达可以分为机械式激光雷达、MEMS激光雷达、相控阵激光雷达、FLASH激光雷达。
机械激光雷达:使用机械部件旋转来改变发射角度从而测量激光发出和收到回波的时间差,确定目标的方位和距离。
优点:
单点测量精度高;
抗干扰能力强;
可承受高激光功率;
缺点:
垂直扫描角度固定;
装调工作量大,体积大;
长时间使用电机损耗大;
MEMS激光雷达:通过MEMS把机械结构集成到体积较小的硅基芯片上,并且内部有可旋转的MEMS微振镜,通过微振镜改变单个发射器的发射角度,从而达到不用旋转外部结构就能扫描的效果。本质上是将机械式激光雷达的机械结构通过微电子技术集成到硅基芯片上,并没有做到完全取消机械结构。
优点:
集成度高、体积小;
元器件损耗低;
芯片级工艺,适合量产;
缺点:
高精度高频振动控制难度大;
制造精度要求高;
无法实现360°扫描,需组合使用;

相控阵激光雷达:光学相控阵原理类似干涉,通过改变发射阵列中每个单元的相位差,合成特定方向的光束。经过这样的控制,光束便可对不同方向进行扫描。雷达精度可以做到毫米级。
优点
扫描速度快:一般可达到MHz量级以上;
扫描精度高:可以做到μrad量级以上;
可控性好:可以在感兴趣的目标区域进行高密度的扫描,这对于自动驾驶环境感知非常有用;
缺点
易形成旁瓣,影响光束作用距离和角分辨率,干涉效果易形成旁瓣,使得激光能量被分散;
加工难度高:光学相控阵要求阵列单元尺寸必须不大于办个波长;

FLASH激光雷达:以上激光雷达是逐点扫描式,单次发射只探测某个方位,而flash激光雷达单次探测可覆盖视角内所有方位,一次性实现全局成像来完成对环境周围环境的探测。
优点
无扫描器件,成像速度快
集成度高,体积小
芯片级工艺,适合量产
缺点
激光功率受限,探测距离近
抗干扰能力差
角分辨率低
无法实现360°成像

欢迎关注小编公众号,最新文章同步更新。
