【深蓝学院】手写VIO第6章--视觉前端--笔记
第5章相关内容,还是CSDN的传统Markdown编辑器好用。
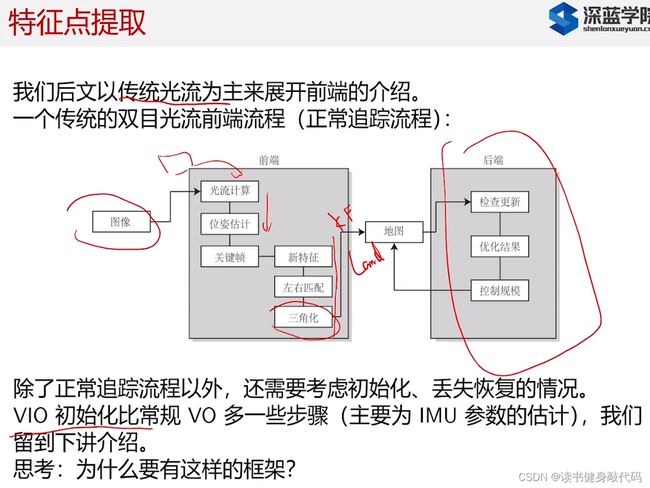
视觉前段在14讲课程中已经讲过,这里再简单复习一下。
1. 前端工作的定性比较,分析
这一节讲了很多关于前端的方法框架的对比讨论,后面看完了相关的论文之后强烈建议再回来听一听本章的第一节课。
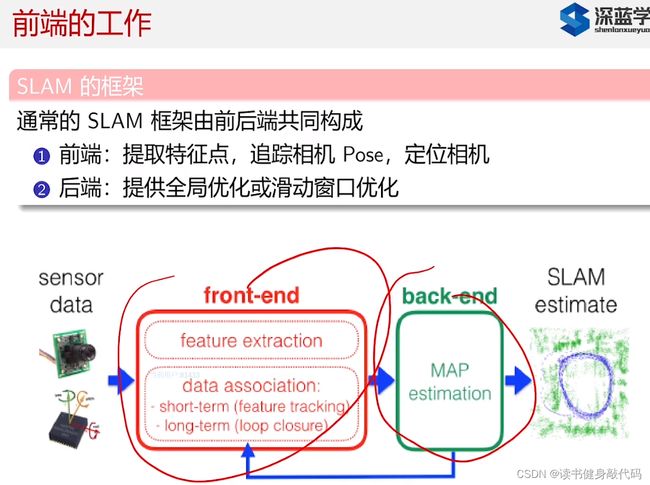
前端和后端不太一样,前端没办法放在同一个框架中把不同方法进行对比(如光流法和特征匹配法),因为可能不同方法在其特定的工况下都能正常工作。
前端实现上的现实问题
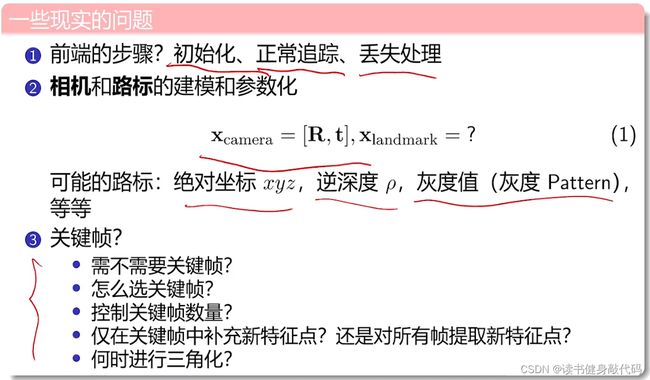
实际上那个,前端在SLAM最终精度上的影响比后端更大,体现出来的更直观,比如某一段没有跟踪上之类的,可能就会影响整体的精度。

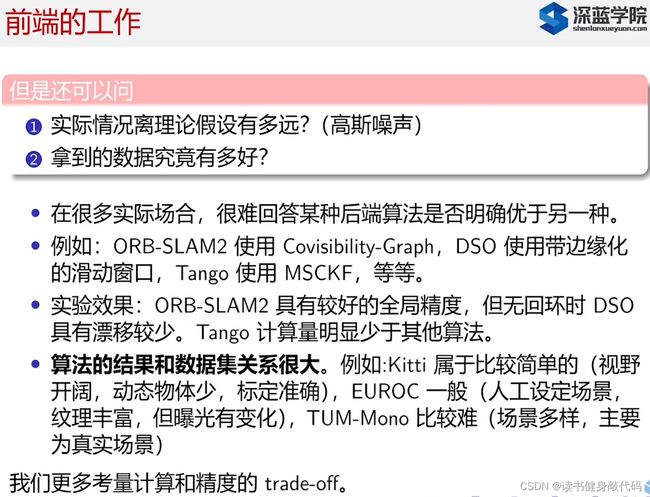
比如一次仿真中,假设数据和噪声都服从Gaussian distribution,用UKF得到了较好的实验结果,但是在实际情况中可能并不都符合Gaussian distribution,所以这个结论不一定是能够很好地泛化的,overfitting了。
比如有local mapping,sliding window,理论上来说全局的marg会更好,到那时实际中全局的marg计算力量过大,不太易实现,具体看后端能够有多大的算了和空间来做,如果没有的话可能就用个EKF就行了。
不同数据集间精度的对比没有什么意义,Kitti场景简单,动的物体比较少,EUROC可能已经做到头了;TUM-Mono难一点,场景较多,有过门,过墙之类的。
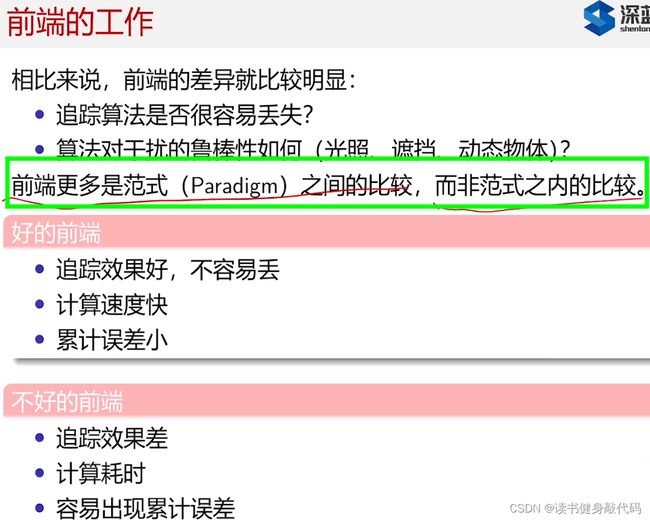
前端因为方法不同(比如特征点法第一步提特征点,直接法第一步求梯度,这些方法都不同,很难在方法内(范式内,先这样理解)进行对比,只能在整个系统之间(范式间)进行对比)。
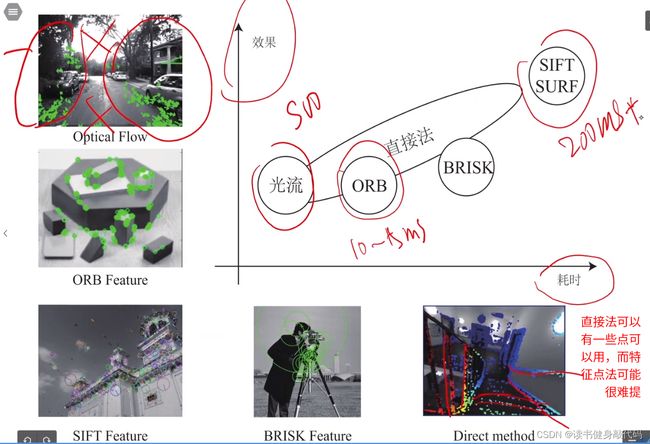
直接法基于灰度不变假设,相对于PnP来说多了乘了个像素梯度,即若该店的梯度为0,则对T的估计无用,故倾向于选择有梯度的点,且梯度越大贡献越大。
很多地方直接法都比特征点法好,因为可能没办法提取到足够多特征点且容易feature lost。(高翔的主观感受,具体还是需要自己去跑一跑)
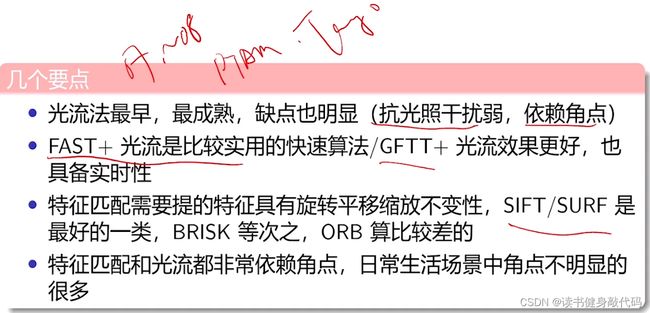
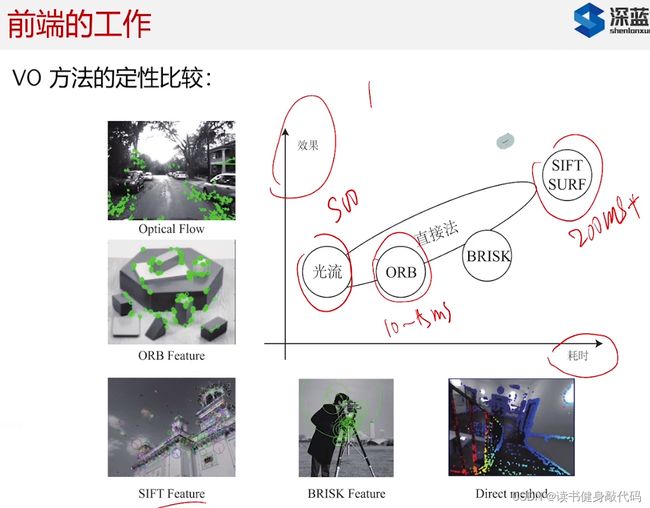
光流法:PTAM,Tango,现在比较成熟,但缺点也明显;
FAST+光流,GFTT+光流:很实用,很快;
特征匹配:SIFT,FURF匹配的最好,但是计算量大;
特征匹配和光流都依赖角点,提不出来的场景无法使用。
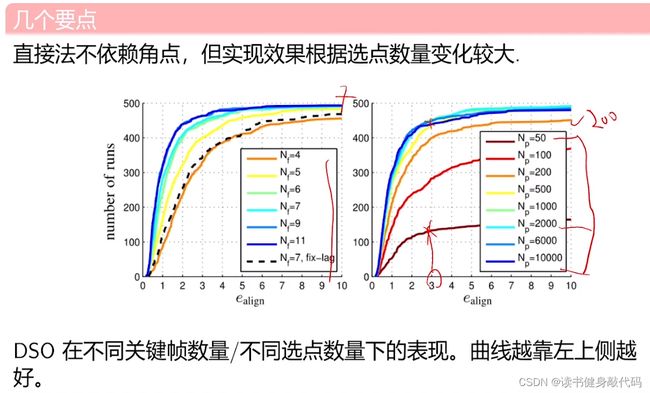 DSO达到某个误差(如小于3)所需的迭代次数,发现跟使用额KF数量和选点数量有关。
DSO达到某个误差(如小于3)所需的迭代次数,发现跟使用额KF数量和选点数量有关。
2. 前端介绍(以光流来展开)
上手可以用FAST+光流来做一个看看效果。
VIO的初始化需要讨论一下,下一节讨论。
有一个问题:对于前端,如何保证整体框架是最优的?即第一步计算光流,第二部估计pose…每一步的操作可以保证是最优的,但是没办法保证整体这个前端框架是最优的,大多数是工程上的经验,只要这样做就能得出还不错的结果。你也可以直接搞一个神经网络,输入imgs输出一堆poses和landmarks,
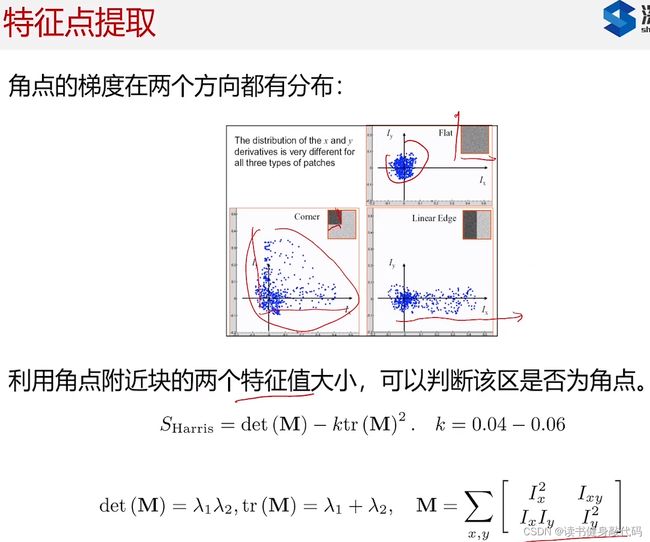
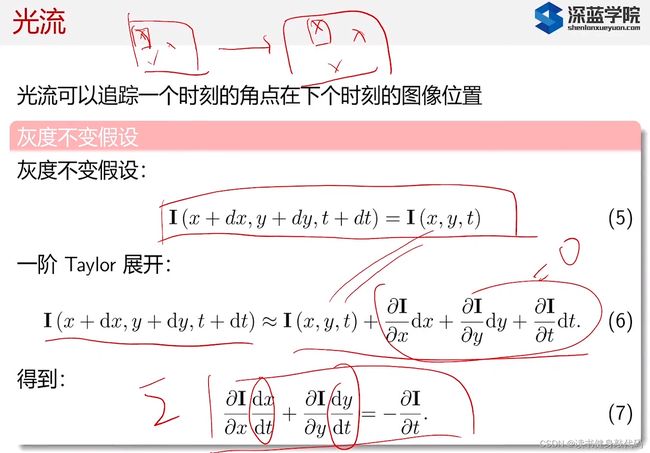
特征提取方法在CV普及开来之前就已经研究出来了,如角点主要看两个方向的梯度分布,对矩阵进行特征值分解(奇异值分解,平方之后就是特征值?特征值体现的是在两个方向上的分布情况):
- 如果两方向梯度都接近于0,倾向于是平坦区域(flat)。
- 如果两个方向都比较大,倾向于角点(Corner)。
- 如果是一方向较大,另一方向较小,倾向于边(Edge)。
具体实现:Harris提出了一个判断方法,计算 S H a r r i s S_{Harris} SHarris指标,
- 如果两个都小,则 S H a r r i s S_{Harris} SHarris接近0,
- 如果都很大,则整体很大,
- 如果一大一小,则结果不大不小,
设置阈值来判断是否为Corner
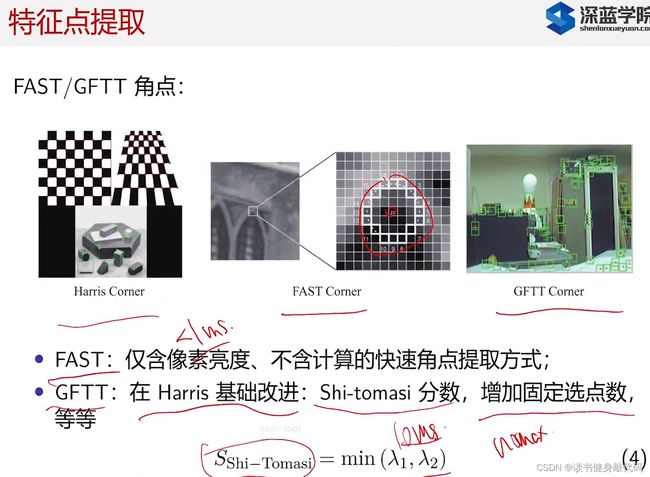
在Harris基础上改进了评分方式,可以指定选点的个数,根据选点个数来确定比较的阈值。
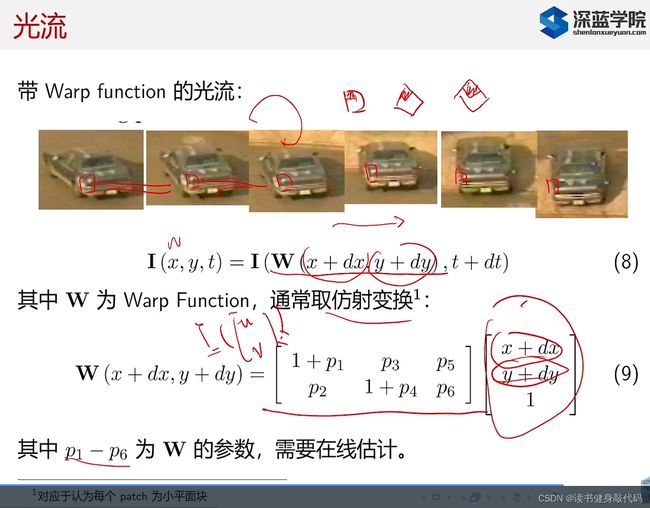
warp光流:对于光流的改进。由于视角可能会发生变化,特征块也会变化,所以要对特征块进行变换使得变换之后的特征块更像待追踪的块(常取仿射变换),在优化过程中,变换的参数还可以调整,以在线估计最优的变换参数。
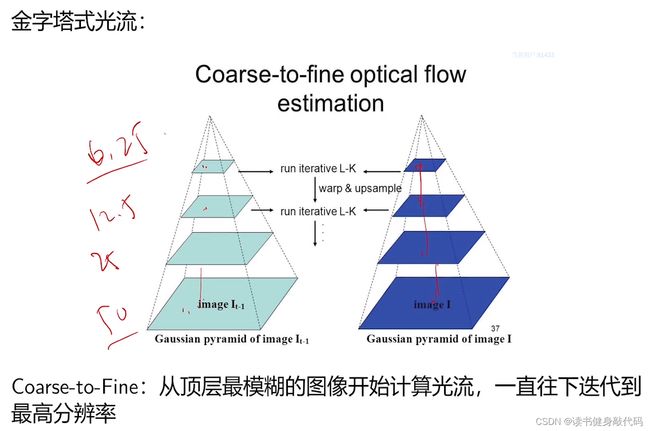
还可以给Warp光流加上金字塔,对高速运动的场景效果更好
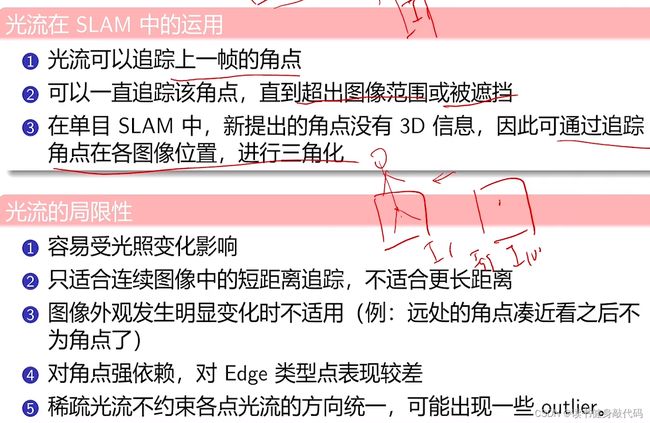
- 不能远距离track,一个具体例子:如果相机不动,有人从面前走过,期间过了100帧图像,那么可能第1帧和第100帧就无法track上了。
工程上的解决方法例如track with map,上面的方法是track weith last( I k I_k Ik和 I k − 1 t r a c k I_{k-1}track Ik−1track)或者是recent,当做完之后再跟地图去比,把地图中的一些点往投到 I k I_k Ik中投,发现能够投过来,然后再把 I k I_k Ik和 I 1 I_1 I1进行对比,看改点能否被track。 - 远近这种场景比较常见,比如远处是空白,但是近处发现有纹理。
- 角点对效果好,边效果不好
- 稀疏光流约束差,可能存在outlier,如稠密光流约束附近的点的亮度差不多,但稀疏没有。
3. 关键帧与三角化
3.1. 关键帧
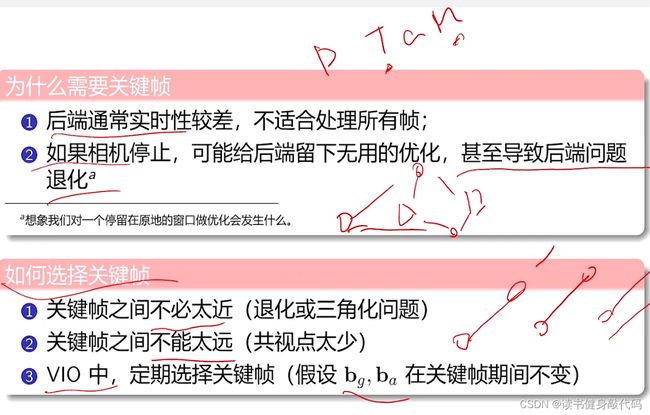
- 关键帧是为了减小问题规模,使得后端能够计算得过来
- 处理相机停止的情况,避免后端退化:如果不挑选KF,camera 不动会导致逆深度计算错误,逆深度变成不可观的,有多个解。
关键帧选择: - 不能太近:太近可能退化,或者三角化算不出深度
- 不能太远:太远可能共视点过少,丢掉中间的motion
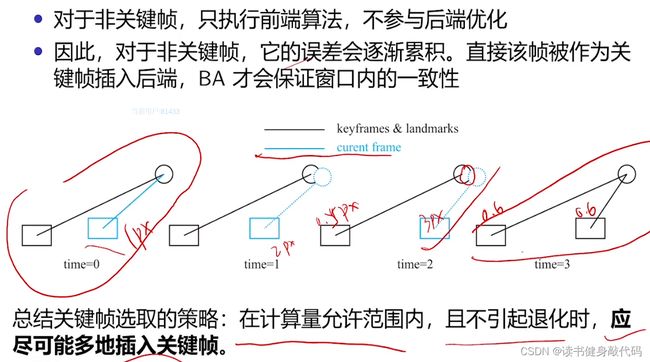
非KF只算前端,不进后端。
插入KF的一个策略:在后端算力的允许的情况下,尽可能多地插入KF,因为KF对后端是友好的(光束法平差,误差均摊,整体误差变小)

ORB_SLAM2后端有个local mapping,只要该线程idle时就插KF,然后对于冗余的再删掉。
DSO使用了sliding window,窗口内保持5~7个KF,并保持一定的展开,老的几帧,中等的几帧,最新的几帧,有以下策略
- 对于老的关键帧,将其中的landmark投到新的里面去,如果新的里面没有观测到这些landmark,则marg掉老的KF。
- 每个KF都有最小寿命,防止刚进来就被marg。
3.2. 三角化
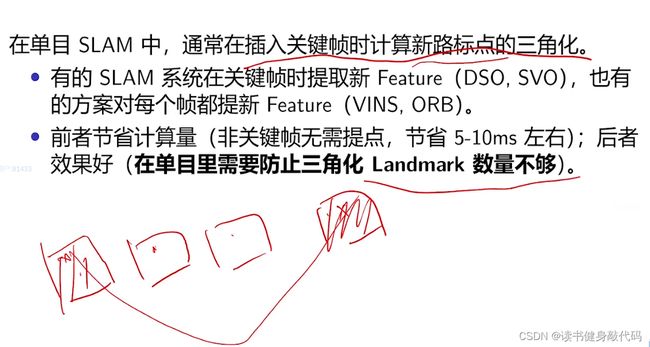
三角化的条件和时间,有的方法只在KF上提Feature,有的每帧都提。前者计算量很小,但是可能导致三角化时点不够,效果不好;后者计算量大但是效果好。
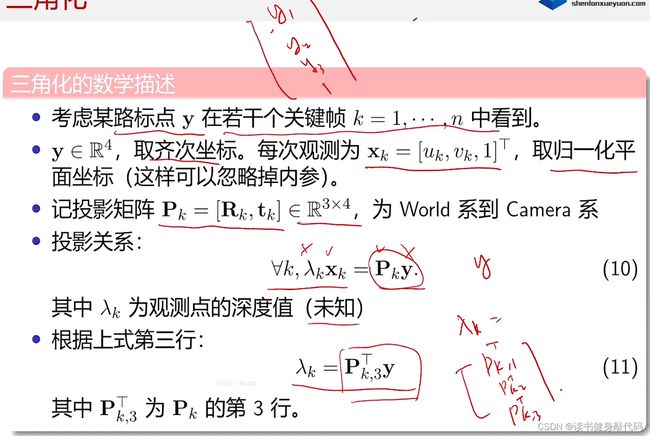
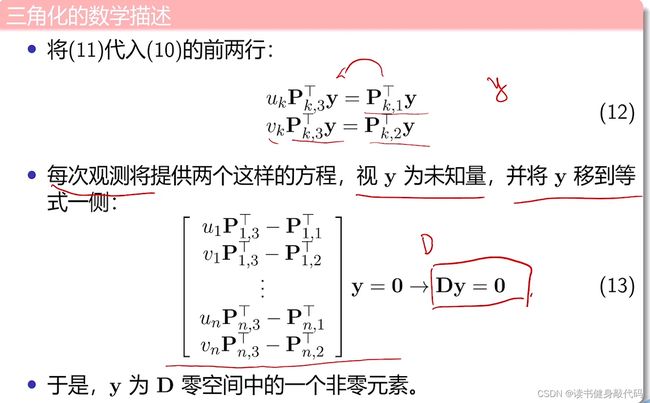
取(10)第3行,带入(10),取钱两行可得(12),这里说一下矩阵的维度,
P k P_k Pk:3*4,每行系数都是1*4,即 P k , 1 T , P k , 2 T , P k , 3 T P_{k,1}^T,P_{k,2}^T,P_{k,3}^T Pk,1T,Pk,2T,Pk,3T都是4*1
y y y:4*1
(13)中D矩阵每行都是4*1,由于每次观测会有u,v两个方程,所以一次观测就是 ( 2 ∗ 1 ) ∗ 4 (2*1)*4 (2∗1)∗4行的D,n此就是 2 n ∗ 4 2n*4 2n∗4行。
求解
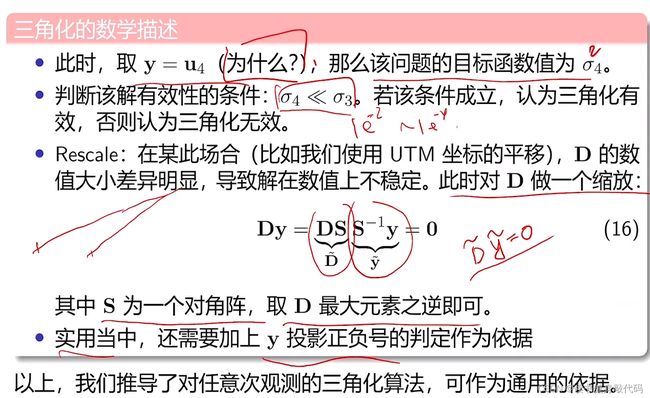
- 作业待解:为什么取 y = u 4 y=u_4 y=u4
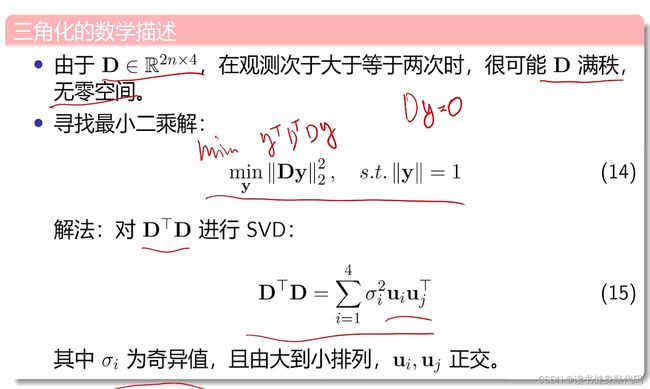
- 由于系数矩阵容易满秩,故寻求最小二乘的数值解,对 D T D D^TD DTD进行奇异值分解(SVD),分解出的奇异值一般是从大到小排列, D T D D^TD DTD是 4 ∗ 4 4*4 4∗4的,4个奇异值,判断该解是否有效(判断三角化是否成立),看 σ 4 < < σ 3 \sigma_4<<\sigma_3 σ4<<σ3(经验上取1e-2~1e-4算远小于,也可以卡得更严一点更小一点)是否成立, σ 1 σ 2 σ 3 \sigma_1\sigma_2 \sigma_3 σ1σ2σ3组成了一个三维的空间, σ 4 \sigma_4 σ4是零空间
- D的数值可能不稳定,数值过大的话会导致较小值的影响体现不出来,需要对D进行rescale,取值方法取为一个对角阵,取D最大元素之逆。
- 还需要检测深度是否满足正确条件。
4. 作业