电流环参数自整定及其原理
前言
电流环参数自整定是通过程序计算电流环PI调节器增益以实现环路响应仅受用户设定PI调节器带宽影响,而和电机本身参数无关的目的。 本文分析电流环参数自整定背后的原理,并通过仿真进行验证。
1、永磁同步电机dq轴数学模型
本文提到的电流环参数自整定值d轴电流环与q轴电流环;电流环的输出为dq轴电压,dq轴电压作用到永磁同步电机得到dq轴电流,电流环调节器的设计目标为把dq轴反馈电流尽可能快的调节到跟dq轴给定电流一致。要设计出好用的电流环调节器首先要理解被控对象。

dq轴等效电路模型如图,可以看到永磁同步电机模型的等效dq轴电路模型和直流有刷电机的等效电路模型一致。
对于q轴有
v q = R s i q + d i q d t L q + ω e ( i d L d + ϕ f ) (1) v_q = R_si_q + \frac{di_q}{dt} L_q+ \omega_e(i_dL_d + \phi _f) \tag{1} vq=Rsiq+dtdiqLq+ωe(idLd+ϕf)(1)
式中 R s i q R_si_q Rsiq为电阻压降, d i q d t L q \frac{di_q}{dt} L_q dtdiqLq 对应q轴电流变化在q轴电感产生的电压; ω e ( i d L d + ϕ f ) \omega_e(i_dL_d + \phi _f) ωe(idLd+ϕf) 为d轴磁链产生的q轴反电势。
对于d轴有
v d = R s i d + d i d d t L d − ω e i q L q (2) v_d = R_si_d + \frac{di_d}{dt} L_d - \omega_ei_qL_q \tag{2} vd=Rsid+dtdidLd−ωeiqLq(2)
式中 R s i d R_si_d Rsid为电阻压降, d i d d t L d \frac{di_d}{dt} L_d dtdidLd 对应d轴电流变化在q轴电感产生的电压; − ω e i q L q -\omega_ei_qL_q −ωeiqLq为q轴磁链产生的d轴反电势。
可以看到永磁同步电机的dq轴数学模型都是多输入非线性的2阶系统。对该系统进行分析或设计控制器较为复杂。为了更好的对该系统进行控制,我们将该系统简化为一阶系统。
通过编码器测速或无感位置速度估算可以知道永磁同步电机转速。通过电流采样可以知道dq轴反馈电流。
如果通过前馈抵消dq轴反电势项的影响,dq轴数学模型可以简化为标准一阶系统。
对于q轴有
v q − ω e ( i d L d + ϕ f ) = R s i q + d i q d t L q (3) v_q - \omega_e(i_dL_d + \phi _f) = R_si_q + \frac{di_q}{dt} L_q \tag{3} vq−ωe(idLd+ϕf)=Rsiq+dtdiqLq(3)
对于d轴有
v d + ω e i q L q = R s i d + d i d d t L d (4) v_d + \omega_ei_qL_q = R_si_d + \frac{di_d}{dt} L_d \tag{4} vd+ωeiqLq=Rsid+dtdidLd(4)
此时,式子右边变成了一阶系统;对于该系统设计PI调节器。因为转速电流可以测的,反电势的大小可以直接计算,电流环调节器设计为PI调节器加前馈的形式;令给定的dq轴电压等于PI调节器的输出与计算得到反电势项之和。
2、PI参数自整定数学原理
将上述永磁同步电机dq轴等效电路模型改写为传递函数的形式;系统输入为电压,输出为电流,对于式子3/4,有:
s y s _ l r = I o u t V = 1 R + s L (5) sys\_lr = \frac{I_{out}}{V} = \frac{1}{R + sL} \tag{5} sys_lr=VIout=R+sL1(5)
对于电流环串联型PI调节器,系统的输入为电流误差,输出为dq轴电压,其传递函数为:
s y s _ p i = V I e r r = P ( s + I s ) (6) sys\_pi = \frac{V}{I_{err}} = P(\frac{s+I}{s}) \tag{6} sys_pi=IerrV=P(ss+I)(6)
将该串联型PI调节器进行电流条件,电流环开环传递函数为电机dq轴等效电路模型传递函数和PI调节器传递函数的串联;系统的输入为dq轴电流误差,输出为dq轴实际电流。
s y s _ o p = I o u t I e r r = 1 R + s L ∗ P ( s + I s ) = s P + I P s ( s L + R ) (7) sys\_op = \frac{I_{out}}{I_{err}} = \frac{1}{R+sL} * P(\frac{s+I}{s}) = \frac{sP+ IP }{s(s L + R)} \tag{7} sys_op=IerrIout=R+sL1∗P(ss+I)=s(sL+R)sP+IP(7)
上文提到电流环PI参数自整定的目的是使得环路的响应不受电机参数的影响。为了达到该目的,我们应该通过计算PI参数,使得式子7的结果中不包含电机参数项。
对此,容易得到
L = k p , R = k i ∗ k p L = kp,R = ki*kp L=kp,R=ki∗kp
即 k p = L , k i = R L kp = L,ki = \frac{R}{L} kp=L,ki=LR
此时有
s y s _ o p = I o u t I e r r = 1 s (8) sys\_op = \frac{I_{out}}{I_{err}} = \frac{1}{s} \tag{8} sys_op=IerrIout=s1(8)
根据上述开环传递函数,可得基于PI调节器的电流环闭环传递函数,其输出为实际电流,输入为给定电流:
s y s _ c l = I o u t I r e f = 1 s + 1 (9) sys\_cl = \frac{I_{out}}{I_{ref}} = \frac{1}{s + 1} \tag{9} sys_cl=IrefIout=s+11(9)
此时的永磁同步电机电流环系统增益应为1,实际电流可以跟随给定电流;但系统响应速度不可调。显然不符合我们的期望,为了能够自由改变系统的响应速度,环路参数中引入和电机参数无关的可调参数环路带宽 ω c \omega _c ωc
令 k p = ω c L , k i = R L kp = \omega _c L,ki = \frac{R}{L} kp=ωcL,ki=LR
系统闭环传递函数为:
s y s _ c l = I o u t I r e f = ω c s + ω c = 1 τ s + 1 (10) sys\_cl = \frac{I_{out}}{I_{ref}} = \frac{\omega_c}{s+\omega _c} = \frac{1}{\tau s + 1} \tag{10} sys_cl=IrefIout=s+ωcωc=τs+11(10)
式中 τ = 1 ω c \tau = \frac{1}{\omega _c} τ=ωc1
此时的永磁同步电机电流环系统增益应为1,实际电流可以跟随给定电流;电流环响应速度取决于 ω c \omega _c ωc。
3、仿真实验
3.1、传递函数验证
通过matlab根据电机参数及环路带宽绘制电机及电流环的阶跃响应波形。
%% 初始化系统参数
Rs = 0.9;
Ls = 1.6e-3;
wc = 1000;
kp = wc*Ls
ki = Rs/Ls
%% 对LR系统建模
sys_lr = tf(1,[Ls Rs])
%%对串联PI调节器建模
sys_pi = tf([kp kp*ki],[1 0])
%% 得到电流环开环传递函数并化简
sys_ol = sys_lr * sys_pi
sys_ol_2 = minreal(sys_ol)
%% 得到电流环闭环传递函数
sys_cl = feedback(sys_ol_2,1)
%% 绘制LR系统阶跃响应波形
step(sys_lr)
%% 绘制电流环阶跃响应波形
step(sys_cl)
其中电机的阶跃响应波形如下:

该工况等效于堵死电机,给 v q vq vq 1V阶跃电压,得到 i q iq iq电流的波形。 i q iq iq稳态值等于 1 R s \frac{1}{Rs} Rs1,系统时间常数 τ = L s R s \tau = \frac{Ls}{Rs} τ=RsLs 符合我们的预期。
电流环的阶跃响应波形如下:

该工况等效于堵死电机,给 i q _ r e f iq\_ref iq_ref 1A阶跃电流,得到iq电流的波形。
可见稳态后iq反馈电流等于iq给定电流,1ms时间内反馈电流上升到稳态电流的0.632倍,系统时间常数 τ = 1 ω c \tau = \frac{1}{\omega _c} τ=ωc1 符合我们的预期。
3.2、simulink验证
接下来的验证采用尽可能接近实际电机控制架构设计,并模拟风机类负载让电机带载工作,按照标准foc框架设计仿真模型如下:

foc部分仿真框图如下:
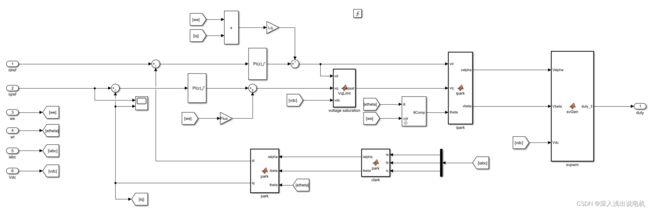
将dq轴反电势通过前馈的方式引入环路(因为仿真中id=0,仿真中未包含d轴定子磁链产生的反电势)。
电机参数配置、电流环带宽配置和3.1部分中传递函数仿真配置一致。
仿真0时刻给定iq电流为50A,运行仿真,反馈iq电流及转速如下图。

图中上面波形为iq反馈电流,图中可以看到1ms时刻电流上升到略高于30A,因为电压通过pwm斩波得到,电流存在纹波。从电流趋势来看,时间常数大约是1ms;和传递函数仿真结果一致。
4、小结
从电流环自整定的目的出发,本文阐述了电流环自整定的原理,推导了电流环PI参数的计算方法。并通过仿真进行了验证。
理论上通过电流环参数自整定的方式可以把电流环传递函数等效为一个极点可以任意配置的一阶系统,需要注意的是受限于实际电路中的采样噪声、信号延时以及采样频率;电流环带宽并不能设置的过高。对于对电流环响应速度有较高需求的场景可以从上述三个方面优化,以提高电流环带宽。
关注公众号 深入浅出说电机 ,回复 DLHCSZZD 获取仿真资料及matlab代码
很高兴你阅读到了结尾,点个赞再走吧~~~