【雕爷学编程】Arduino动手做(152)---BMI160 六轴陀螺仪模块2
37款传感器与执行器的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止这37种的。鉴于本人手头积累了一些传感器和执行器模块,依照实践出真知(一定要动手做)的理念,以学习和交流为目的,这里准备逐一动手尝试系列实验,不管成功(程序走通)与否,都会记录下来—小小的进步或是搞不掂的问题,希望能够抛砖引玉。
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验一百五十二:BMI160模块 6DOF 6轴 角速度 陀螺仪+重力加速度传感器IICSPI
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
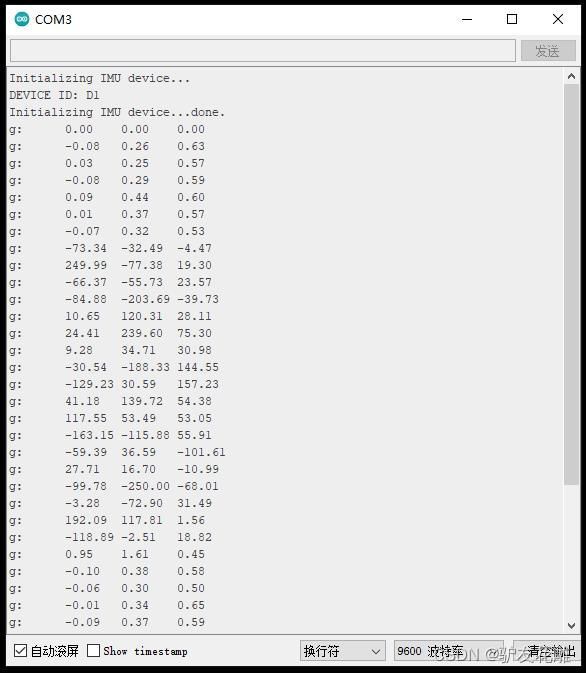
项目之三:读取陀螺仪数据
Arduino实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
BMI160 6轴惯性运动传感器 16位3轴加速度+超低功耗3轴陀螺仪 I2C/SPI 14LGA
项目之三:读取陀螺仪数据
实验接线:
BMI160 UNO
VIN 5V
GND GND
SCL A5
SDA A4
SAO GND
INT1 D2
*/
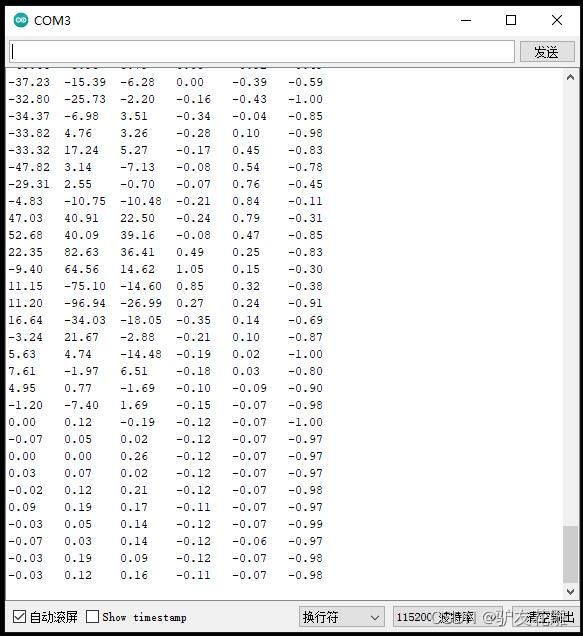
#include 实验串口返回情况
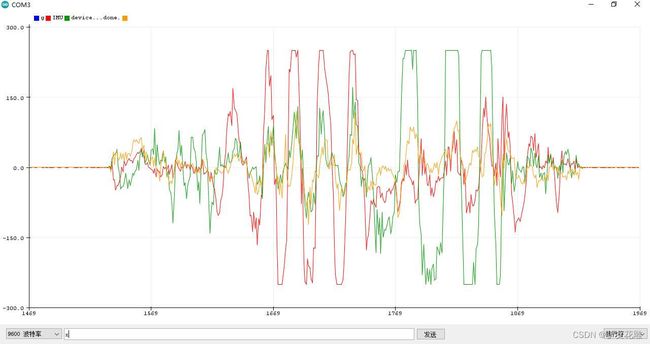
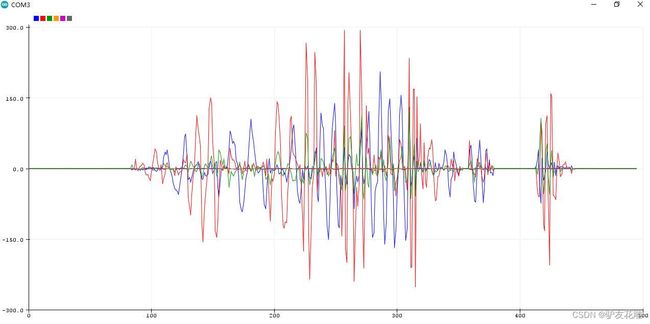
实验串口绘图器返回情况
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
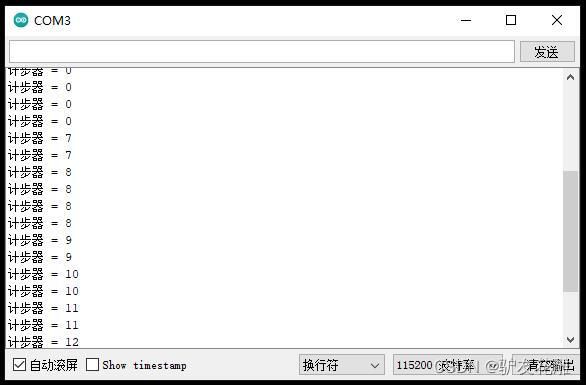
项目之四:从硬件 bmi160 读取计步器
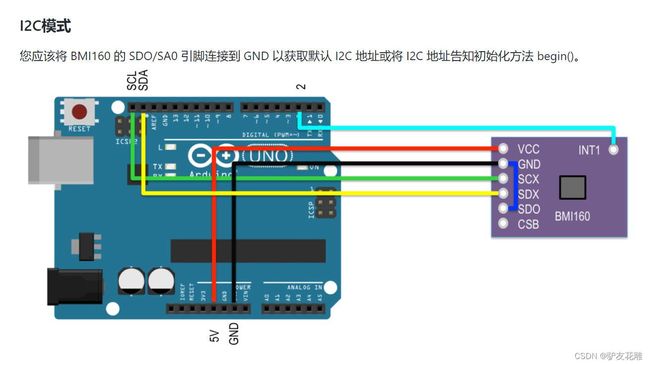
I2C地址:
0x68:将 BMI160 的 SDIO 引脚连接到 GND,即默认 I2C 地址
实验接线:
BMI160 UNO
VIN 5V
GND GND
SCL A5
SDA A4
SAO GND
INT1 D2
Arduino实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
BMI160 6轴惯性运动传感器 16位3轴加速度+超低功耗3轴陀螺仪 I2C/SPI 14LGA
项目之四:从硬件 bmi160 读取计步器
I2C地址:
0x68:将 BMI160 的 SDIO 引脚连接到 GND,即默认 I2C 地址
实验接线:
BMI160 UNO
VIN 5V
GND GND
SCL A5
SDA A5
SAO GND
INT1 D2
*/
#include 实验串口返回情况
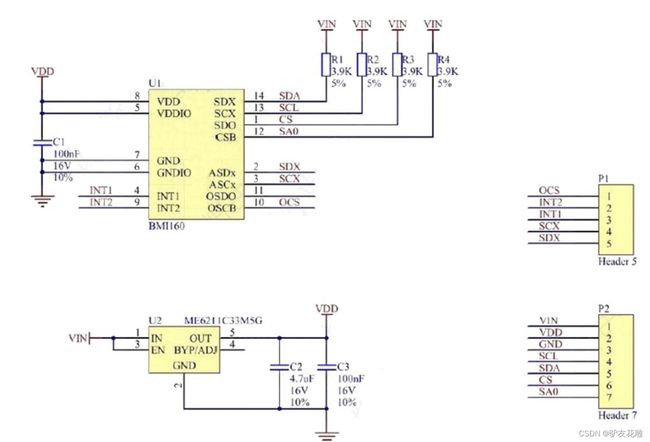
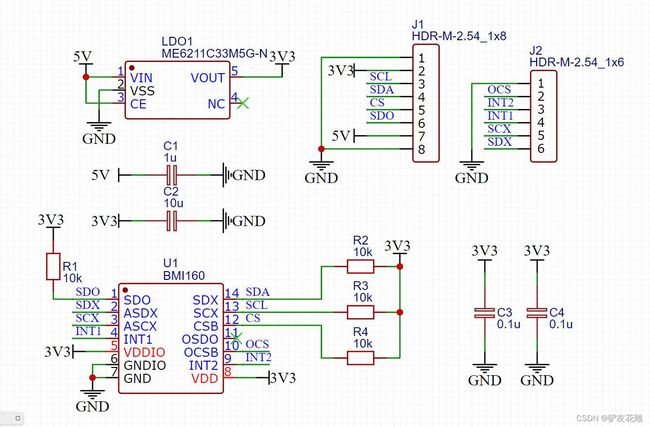
模块参考电原理图之二

【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
项目之五:获取陀螺仪传感器的数据
Arduino实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
BMI160 6轴惯性运动传感器 16位3轴加速度+超低功耗3轴陀螺仪 I2C/SPI 14LGA
项目之五:获取陀螺仪传感器的数据
I2C地址:
0x68:将 BMI160 的 SDIO 引脚连接到 GND,即默认 I2C 地址
实验接线:
BMI160 UNO
VIN 5V
GND GND
SCL A5
SDA A5
SAO GND
INT1 D2
*/
#include 实验串口返回情况
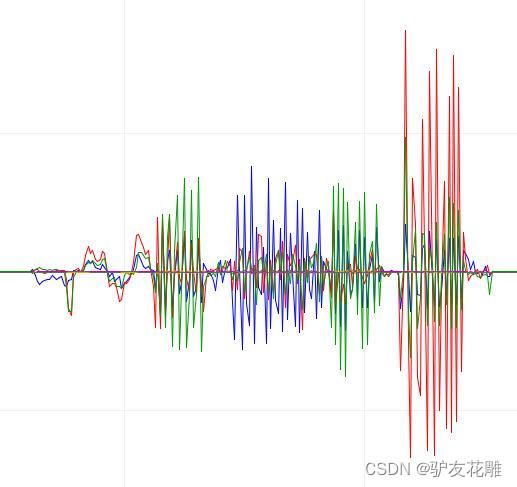
实验串口绘图器返回情况
BMI160 传感器 API概述
体积小、功耗低的 BMI160 是一款低噪声 16 位 IMU,专为 AR 或室内导航等移动应用而设计,可提供高度准确的传感器数据和实时传感器数据。BMI160 的低电流消耗使电池驱动设备中的应用成为可能。该传感器具有可配置的片上中断引擎,可提供基于运动的手势识别和上下文感知作为始终开启的后台功能。
主要特征
任意运动检测(加速度计)
显着运动检测(加速度计)
步进检测器(加速度计)
敲击感应(加速度计)
方向识别(加速度计)
平面检测(加速度计)
低重力/自由落体检测(加速度计)
高 G 检测(加速度计)
慢动作警报/无动作中断(加速度计)
数据就绪检测(加速度计、陀螺仪和外部传感器)
PMU触发器(陀螺仪)
FIFO 中断((加速度计、陀螺仪和外部传感器)
目标应用
增强现实和沉浸式游戏
室内导航
3D 扫描/室内测绘
高级手势识别
沉浸式游戏
9轴运动检测
空中鼠标应用程序和指针
计步器/计步
移动应用的高级系统电源管理
相机模组的光学防抖
自由落体检测和保修记录
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
项目之九:低功耗模式计步器
通过 setStepPowerMode 设置计步器功耗模式(stepNormalPowerMode 表示正常模式,stepLowPowerMode 表示低功耗模式)
Arduino实验开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验一百六十三:BMI160 6轴惯性运动传感器 16位3轴加速度+超低功耗3轴陀螺仪 I2C/SPI 14LGA
项目之九:低功耗模式计步器
I2C地址:
0x68:将 BMI160 的 SDIO 引脚连接到 GND,即默认 I2C 地址
实验接线:
BMI160 UNO
VIN 5V
GND GND
SCL A5
SDA A5
SAO GND
INT1 D2
*/
#include BMI160 6轴惯性运动传感器电原理图