【王道考研 数据结构 】基础算法代码复习总结 C语言(树和图)
文章目录
- 一、树和二叉树
-
- 树的遍历
- 线索二叉树
-
- 遍历
- 二、图
-
- BFS
- DFS
- 最小生成树
-
- Prim算法
- Kruskal算法
- Dijkstra算法(求单源最短路径问题)
-
- 算法原理
- 邻接矩阵实现
- 邻接表实现
- Floyd算法(求多源最短路径问题)
-
- 算法思想
- 算法原理
- 邻接矩阵实现
- 拓扑排序
-
- 原理
- 栈实现拓扑排序(邻接表实现)
一、树和二叉树
树的遍历
#include 线索二叉树
#include 遍历
//中序线索树的遍历
ThreadNode *Firstnode(ThreadNode *p){
while(p->ltag==0)
p=p->lchild;
return p;
}
ThreadNode *Nextnode(ThreadNode *p){
if(p->rtag==0)
return Firstnode(p->rchild);
else
return p->rchild;
}
//不含头结点的中序线索树的中序遍历
void Inorder(ThreadNode *T){
for(ThreadNode *p=Firstnode(T);p!=NULL;p=Nextnode(p))
visit(p);
}
二、图
BFS
广度优先搜索
主要使用队列实现,对每个节点可能到达的路径进行入队出队判断
#include DFS
深度优先搜索
bool visited[MAX_VERTEX_NUM];
void DFSTraverse(Graph G){
for(v=0;v<G.vexnum;++v)
visited[v]=FALSE;
for(v=0;v<G.vexnum;++v)
if(!visited[v])
DFS(G,v);
}
void DFS(Graph G,int v){
visit(v);
visited[v]=TRUE;
for(w=FirstNeighbor(G,v);w>=0;w=NextNeighbor(G,v,w))
if(!visited[w]){
DFS(G,w);
}
}
最小生成树
关于图的几个概念定义:
连通图:在无向图中,若任意两个顶点vivi与vjvj都有路径相通,则称该无向图为连通图。
强连通图:在有向图中,若任意两个顶点vivi与vjvj都有路径相通,则称该有向图为强连通图。
连通网:在连通图中,若图的边具有一定的意义,每一条边都对应着一个数,称为权;权代表着连接连个顶点的代价,称这种连通图叫做连通网。
生成树:一个连通图的生成树是指一个连通子图,它含有图中全部n个顶点,但只有足以构成一棵树的n-1条边。一颗有n个顶点的生成树有且仅有n-1条边,如果生成树中再添加一条边,则必定成环。
最小生成树:在连通网的所有生成树中,所有边的代价和最小的生成树,称为最小生成树。
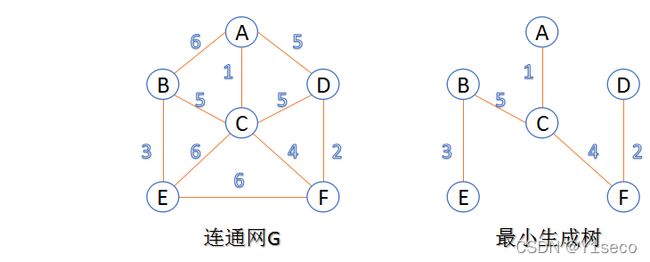
下面介绍两种求最小生成树算法
1.Kruskal算法
此算法可以称为“加边法”,初始最小生成树边数为0,每迭代一次就选择一条满足条件的最小代价边,加入到最小生成树的边集合里。
把图中的所有边按代价从小到大排序;
把图中的n个顶点看成独立的n棵树组成的森林;
按权值从小到大选择边,所选的边连接的两个顶点ui,viui,vi,应属于两颗不同的树,则成为最小生成树的一条边,并将这两颗树合并作为一颗树。
重复(3),直到所有顶点都在一颗树内或者有n-1条边为止。

- Prim算法
此算法可以称为“加点法”,每次迭代选择代价最小的边对应的点,加入到最小生成树中。算法从某一个顶点s开始,逐渐长大覆盖整个连通网的所有顶点。
图的所有顶点集合为VV;初始令集合u={s},v=V−uu={s},v=V−u;
在两个集合u,vu,v能够组成的边中,选择一条代价最小的边(u0,v0)(u0,v0),加入到最小生成树中,并把v0v0并入到集合u中。
重复上述步骤,直到最小生成树有n-1条边或者n个顶点为止。
由于不断向集合u中加点,所以最小代价边必须同步更新;需要建立一个辅助数组closedge,用来维护集合v中每个顶点与集合u中最小代价边信息,:
struct
{
char vertexData //表示u中顶点信息
UINT lowestcost //最小代价
}closedge[vexCounts]

Prim算法
最小生成树是一个图的极小连通子图,它包含原图的所有顶点,并且所有边的权值之和尽可能小。
Prim算法就是图的最小生成树算法之一,Prim 算法是一种求解加权无向连通图的 MST 问题的贪心算法。它能找出一个边的子集,使得其构成的树包含图中所有顶点,且边的权值之和最小。
Prim算法以图的顶点为基础,从首个初始顶点,寻找到达其他顶点权值最小的边,并把该顶点加入到“已到达顶点”的集合中,此时,这个集合就是这个图的最小生成树。
一般用一维数组比较方便表达最小生成树,数组下标所对应的元素,代表该顶点在最小生成树当中的父亲节点。
// 基于Prim算法实现最小生成树
#include 实验结果
请输入带权无向图的定点数和边数(以空格隔开):
7 12
请依次输入12条边的开始节点,结束节点,权值(以空格隔开):
1 2 23
1 6 28
1 7 36
2 3 20
2 7 1
3 4 15
3 7 4
4 5 3
4 7 9
5 6 17
5 7 16
6 7 25
lowcost[]数组:0 23 4 9 3 17 1
closest[]数组:0 1 7 7 4 5 2
最小生成树总的花费是:57
D:\projects\test\x64\Release\test.exe (进程 1788)已退出,返回代码为: 0。
Kruskal算法
/************************************************************************
CSDN 勿在浮沙筑高台 http://blog.csdn.net/luoshixian099算法导论--最小生成树(Prim、Kruskal)2016年7月14日
************************************************************************/
#include Dijkstra算法(求单源最短路径问题)
算法原理
- 适合求解有回路的带权图的最短路径
- 可以求任意两个顶点的最短路径
- 不适合求带负权值的最短路径问题
具体解释

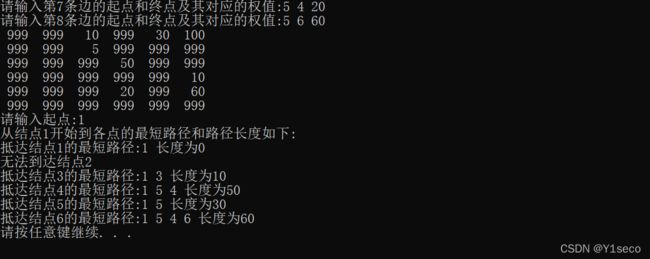
邻接矩阵实现
#includetemp;
//temp.push(start_point);
path.push_back(temp);
//(不可行)path[i].push(start_point);//将起点作为最初始的路径加入每个结点对应的队列中
}
//初始化solved数组
for (int i = 0; i < this->vexnum; i++)
{
solved[i] = false;
}
for (int i = 0; i < this->vexnum; i++)
{
if (this->arcs[this->LocateVex(start_point)][i] != MAX)
{
dist[i] = this->arcs[this->LocateVex(start_point)][i];
path[i].push(this->vexs[i]);
}
}
solved[this->LocateVex(start_point)] = true;
for (int i = 0; i < this->vexnum; i++)
{//返回地找
ArcType mind = MAX;
int v = i;
for (int j = 0; j < this->vexnum; j++)
{//一个劲地往前走
//(移出for)int v = i;
if (!solved[j] && dist[j] < mind)
{
mind = dist[j];
v = j;
}
solved[v] = true;
int w = this->firstadj(v);
while (w != -1)
{
if (dist[v] + this->arcs[v][w] < dist[w])
{
dist[w] = dist[v] + this->arcs[v][w];
path[w] = path[v];
path[w].push(vexs[w]);
}
w = this->nextadj(v, w);
}
}
}
cout << "从结点" << start_point << "开始到各点的最短路径和路径长度如下:"<<endl;
for (int i = 0; i < this->vexnum; i++)
{
if (dist[i] == MAX)
{
cout << "无法到达结点" << this->vexs[i] << endl;
}
else
{
cout << "抵达结点" << this->vexs[i] << "的最短路径:";
int path_length = path[i].size();
for (int j = 0; j < path_length; j++)
{
cout << path[i].front() << " ";
path[i].pop();
}
cout << "长度为" << dist[i] << endl;
}
}
}
int main()
{
Graph s;
s.Create();
s.Show();
VertexType start_point;
cout << "请输入起点:";
cin >> start_point;
s.Dijkstra(start_point);
system("pause");
return 0;
}
结果:
参考文章
邻接表实现
待定
Floyd算法(求多源最短路径问题)
算法思想

概括为迭代更新i经由k到j的最短路径.
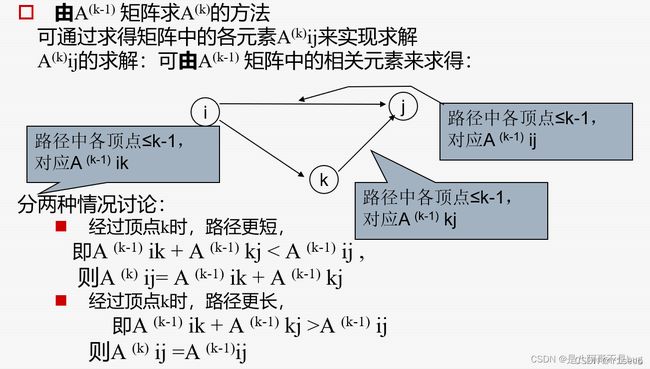
算法原理
- 从任意一条单边路径开始。所有两点之间的距离是边的权,如果两点之间没有边相连,则权为无穷大。
- 对于每一对顶点 u 和v,看看是否存在一个顶点 w 使得从 u 到 w 再到 v 比已知的路径更短。如果是更新它。
- 把图用邻接矩阵G表示出来,如果从Vi到Vj有路可达,则G[i][j]=d,d表示该路的长度;否则G[i][j]=无穷大。定义一个矩阵D用来记录所插入点的信息,D[i][j]表示从Vi到Vj需要经过的点,初始化D[i][j]=j。把各个顶点插入图中,比较插点后的距离与原来的距离,G[i][j]= min( G[i][j], G[i][k]+G[k][j] ),如果G[i][j]的值变小,则D[i][j]=k。在G中包含有两点之间最短道路的信息,而在D中则包含了最短通路径的信息。
- 比如,要寻找从V5到V1的路径。根据D,假如D(5,1)=3则说明从V5到V1经过V3,路径为{V5,V3,V1},如果D(5,3)=3,说明V5与V3直接相连,如果D(3,1)=1,说明V3与V1直接相连。
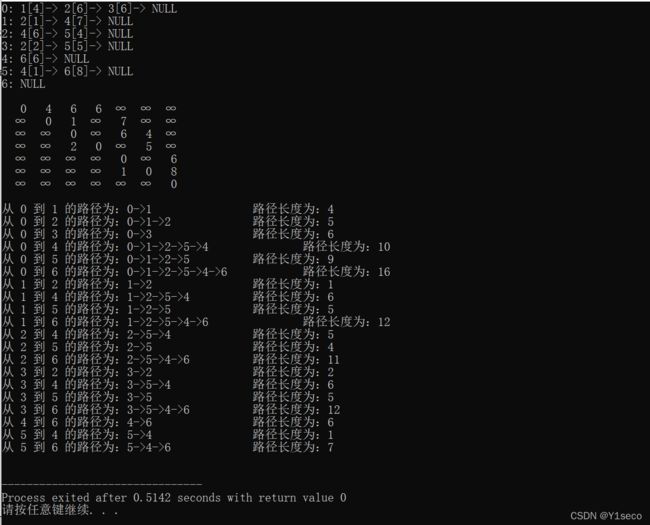
邻接矩阵实现
#include结果:
参考文章1
参考文章2
拓扑排序
原理
- 从AOV网中选择一个没有前驱的顶点并输出.
- 从网中删除该顶点和所有以它为起点的有向边.
- 重复直至AOV网为空或当前网中不存在无前驱的顶点为止。后一种情况说明有向图中必然存在环.
栈实现拓扑排序(邻接表实现)
#include 测试数据,新建in.txt文件输入内容
1)有环
4 4
1 2
2 3
3 4
4 2
2)无环
12 16
1 2
1 3
2 3
1 4
3 5
4 5
11 6
5 7
3 7
3 8
6 8
9 10
9 11
9 12
10 12
1 12
结果:


参考文章
https://cloud.tencent.com/developer/article/1569368