强化学习基础(1)- 理论和算法
目录
1.基本概念
1.1组成部分
1.2 马尔可夫决策过程
2 有模型强化学习
2.1状态值函数
2.2动作值函数
2.3二者关系
2.4 探索和利用
2.5动态规划(DP)(有模型求解方法)
2.5.1预测任务
2.5.1控制任务
3.无模型强化学习
3.1 Value-Based
3.1.1蒙特卡洛法
3.1.2时序差分法
3.1.2.1 SARSA和Q-Learning
3.2 Policy-Based
3.2.1概念
3.2.2 Policy Gradient
3.2.3深度强化学习
3.3 Actor and Critic
4.主要算法
往期文章
参考文献
1.基本概念
1.1组成部分

以吃豆人(Agent)游戏为例,游戏目标把屏幕里面所有的豆子全部吃完,同时又不能被幽灵碰到,被幽灵碰到则游戏结束。Agent每走一步、每吃一个豆子或者被幽灵碰到,屏幕左上方的分数(都会发生变化,图例中当前分数是435分。
- Agent(智能体):强化学习训练的主体就是Agent,该游戏中Agent为吃豆人。
- Environment(环境):整个游戏的大背景就是环境;吃豆人、幽灵、豆子以及里面各个隔离板块组成了整个环境。
- State(状态):当前 吃豆人移动一下,幽灵也会移动,豆子数目也在会变化,也就是说,吃豆人发生一个动作,环境就会发生变化。
- Action(行动):基于当前的状态,吃豆人可以采取哪些动作,比如向左or右,向上or下。
- Reward(奖励):吃豆人在当前状态下,采取了某个的动作后,会获得环境的一定反馈就是奖励,在游戏中直观的表现就是分数的变化。
1.2 马尔可夫决策过程
强化学习的训练过程可以简单理解为马尔可夫决策过程(MDP)。
MDP核心思想:下一步的State只和当前的状态State以及当前状态将要采取的Action有关,只回溯一步。
马尔可夫决策过程组成部分:

2 有模型强化学习
假若 P和 R 已知,这就是基于模型的强化学习(Model-based RL),可以利用动态规划(DP)来求解最优策略。为了求解最优策略引入值函数的概念,而值函数又分为状态值函数和动作值函数。
2.1状态值函数
状态值函数:评价状态,用函数 ![]() 来表示,其定义为:
来表示,其定义为:
上述公式表示在状态 s下未来累积回报的期望,期望越大说明当前状态越有利,在AlphaGo里面就用来衡量当前棋局的落子情况对白方/黑方的有利程度,衡量了谁最后会胜出。
2.2动作值函数
动作值函数:评价当前状态下的动作,用函数 ![]() 来表示,其定义为:
来表示,其定义为:

上述公式表示了在状态 s下采取动作 a的累积回报,在AlphaGo里面就表示当前棋局状态下采取不同落子的动作对应的回报。
补充解释:比方说,本科毕业你可以选择工作或者读研,那么工作和读研就是两种状态,对这两种状态进行评价(长期的回报),就叫做状态值函数。如果说,你读研之后,选择了计算机或者物理学,这就是当前状态下的动作选择,对该动作评价(长期的回报),就叫做动作值函数。
一般来讲,如果可以获得最优![]() ,那么我们的策略选择就可以贪婪地采用最优动作:
,那么我们的策略选择就可以贪婪地采用最优动作:

2.3二者关系

2.4 探索和利用
实际我们在进行强化学习训练过程中,会遇到一个“EE”问题。这里的Double E是“Explore & Exploit”,“探索&利用”。比如在Value-Based中,如下图StateA的状态下,最开始Action1&2&3对应的Value都是0,因为训练前我们根本不知道,初始值均为0。如果第一次随机选择了Action1,这时候StateA转化为了StateB,得到了Value=2,系统记录在StateA下选择Action1对应的Value=2。如果下一次Agent又一次回到了StateA,此时如果我们选择可以返回最大Value的action,那么一定还是选择Action1。因为此时StateA下Action2&3对应的Value仍然为0。Agent根本没有尝试过Action2&3会带来怎样的Value。

所以在强化学习训练的时候:
一开始会让Agent更偏向于探索Explore,并不是哪一个Action带来的Value最大就执行该Action,选择Action时具有一定的随机性,目的是为了覆盖更多的Action,尝试每一种可能性。
等训练很多轮以后各种State下的各种Action基本尝试完以后,我们这时候会大幅降低探索的比例,尽量让Agent更偏向于利用Exploit,哪一个Action返回的Value最大,就选择哪一个Action。
2.5动态规划(DP)(有模型求解方法)
假设知道P 和R,就可以实现利用动态规划来完成预测和控制任务。
预测任务的输入是![]() 和策略
和策略  ,目的是为了评估当前策略 的好坏,即求解状态值函数
,目的是为了评估当前策略 的好坏,即求解状态值函数 ![]() ,注意这里上标指的是当前的策略对应的状态值函数;控制任务的输入是
,注意这里上标指的是当前的策略对应的状态值函数;控制任务的输入是![]() ,目的是为了寻找最优策略
,目的是为了寻找最优策略 ![]() 和
和  。
。
2.5.1预测任务
利用上面 Q和 V 关系的公式,很容易得到 V 的迭代公式:

那么在评估任务中,上述公式里面的 P,R, 都是已知的,只要迭代求解 V 即可,求解过程即上述迭代方程也称为贝尔曼期望方程(Bellman Expectation Equations)。
2.5.1控制任务
对于control任务,由于 和 V都是未知的,可采用两种方法
策略迭代(Policy Iteration):先进行策略评估(Policy Evaluation),即固定住 ,使用上述预测任务的做法来求解最优值函数 V ,再进行策略提升(Policy Improvement),可以简单地 利用贪婪算法找到最优策略,重复交替进行评估和提升,即可得到最优解。

值迭代(Value Iteration):利用的是下面的公式:


两种方法分析:

总结:贝尔曼方程用在预测任务中,只用求解V即可,贝尔曼最优方程,是在V的基础上找到最优![]() 和 。
和 。
以下图为例,白色圆圈表示状态,根节点是当前状态,当前状态下可以通过![]() 来选取动作,黑色实心点表示动作,采取某个动作又会根据
来选取动作,黑色实心点表示动作,采取某个动作又会根据 ![]() 转移到不同的状态
转移到不同的状态  ,故利用树动态规划可以得到贝尔曼期望方程和贝尔曼最优方程。
,故利用树动态规划可以得到贝尔曼期望方程和贝尔曼最优方程。

3.无模型强化学习
此时P和R是未知的,只有智能体和环境交互后才能得到。
3.1 Value-Based
基于价值(动作)(Value-Based ):
解释1:是输出所有可能的下一步动作的价值,我们会根据最高价值来选择动作。简单来说,选择当前State下对应Value最大的Action。强调一点这里面的Value并不只是从当前State进入下一个State的Action,还包括当前Action对未来的一系列影响的Reward。
解释2:假设StateA状态下,可以采取的Action有3个,但是Action2带来的Value最大,所以最终Agent进入StateA状态时,就会选择Action2。(强调一点这里面的Value值,在强化学习训练开始时都是不知道的,我们一般都是设置为0。然后让Agent不断去尝试各类Action,不断与环境交互,不断获得Reward,然后根据我们计算Value的公式,不停地去更新Value,最终在训练N多轮以后,Value值会趋于一个稳定的数字,才能得出具体的State下,采取特定Action,对应的Value是多少)。
算法:Q-Learning、SARSA(State-Action-Reward-State-Action)
适用场景:Action空间是离散的,比如吃豆子里面的动作空间是“上下左右”,但有些Agent的动作空间是一个连续的过程,比如机械臂的控制,整个运动是连续的。如果强行要将连续的Action拆解为离散的也是可以的,但是得到的维度太大,往往是指数级的,不适宜训练。
Value-Based有两种经典的方法,一种是蒙特卡洛法(MC),一种是时间差分法(TD)。
3.1.1蒙特卡洛法
蒙特卡洛法(MC):
在当前状态  下,想获得当前状态的
下,想获得当前状态的![]() ,该怎么办呢?从当前状态 开始模拟运行(即采样一些运行轨迹),直到最终状态,计算这些轨迹(Trajectories)的评价累积回报
,该怎么办呢?从当前状态 开始模拟运行(即采样一些运行轨迹),直到最终状态,计算这些轨迹(Trajectories)的评价累积回报![]() ,然后使
,然后使 ![]() 尽可能与
尽可能与  接近,那么采用更新策略:
接近,那么采用更新策略:

上述MC运行过程有两个需要注意的地方:第一,采样的轨迹必须到最终状态,因此上述得到的 是对 ![]() 的无偏估计,但是由于轨迹比较长,会产生方差累积的情况,因而方差比较大;第二,模拟运行的策略选择是有多种方法的,不同的策略构成不同的算法,比方Q-learning和SARSA。一般是采用当前学习到的策略+探索得到的策略来模拟运行。
的无偏估计,但是由于轨迹比较长,会产生方差累积的情况,因而方差比较大;第二,模拟运行的策略选择是有多种方法的,不同的策略构成不同的算法,比方Q-learning和SARSA。一般是采用当前学习到的策略+探索得到的策略来模拟运行。
3.1.2时序差分法
时序差分法(TD):
它是在当前状态模拟运行一步,而不是模拟到最终状态,因此其更新策略为:
![]()
TD是利用立即回报和下一状态的值函数的和 ![]() 作为指导来学习的过程,前面的指导被称为TD-Target。TD因为只采样一步,因而效率比较高,但是TD-Target是有偏的,但是方差小。
作为指导来学习的过程,前面的指导被称为TD-Target。TD因为只采样一步,因而效率比较高,但是TD-Target是有偏的,但是方差小。
总结:蒙特卡洛法得到的值函数是无偏估计,但是由于轨迹比较长,会产生方差累积的情况,时序差分法因为只采样一步,因而效率比较高,但是值函数是有偏的,但是方差小。
3.1.2.1 SARSA和Q-Learning
两个算法基于的公式很类似,都是将上述介绍的TD里面的 V 换成Q 得到:
![]()
SARSA:
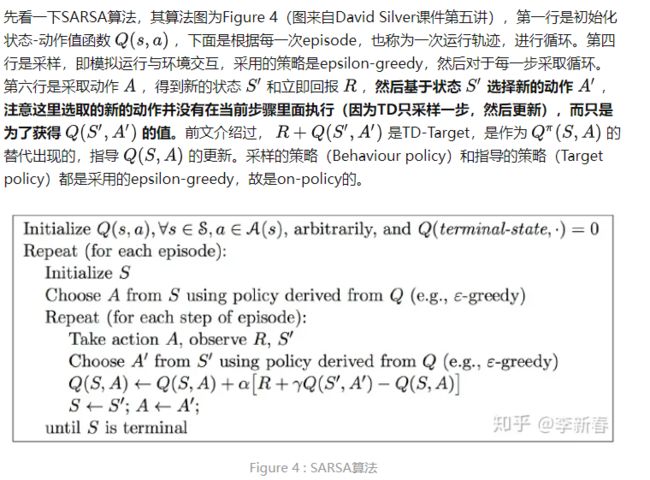
Q-Learning:

3.2 Policy-Based
3.2.1概念
Value-Based方法适用于离散空间,但在连续空间中存在一些问题。
问题1:对于不连续的动作,这两种方法都可行,但如果是连续的动作(机械臂控制)基于价值的方法是不能用的,如果强行要将连续的Action拆解为离散的也是可以的,但是得到的维度太大,往往是指数级的,不适宜训练。我们只能用一个概率分布在连续动作中选择特定的动作。
问题2:随机策略(Stochastic policy)的学习比较困难,在基于值的强化学习里面得到的是 ![]() ,给定一个状态 s ,选择的策略是确定性的,不适合于那些最优策略就是随机策略的问题,比如石头剪刀布的最优策略是以(1/3, 1/3, 1/3)的概率来选择石头/剪刀/布。
,给定一个状态 s ,选择的策略是确定性的,不适合于那些最优策略就是随机策略的问题,比如石头剪刀布的最优策略是以(1/3, 1/3, 1/3)的概率来选择石头/剪刀/布。
Policy Based的强化学习可以解决以上问题。
概念(Policy-Based):
解释1:是强化学习中最直接的一种,它能够感官分析所处的环境(状态),直接输出采取下一步各种行动的概率,然后根据概率采取行动,所有每种行动都可能被采用,只是可能性不同。 解释2:基于每个State可以采取的Action策略,针对Action策略进行建模,学习出具体State下可以采取的Action对应的概率,然后根据概率来选择Action。
具体解释:

总结:基于值的强化学习目的在于学习到![]() ,然后获得贪心策略,当作最优策略;而基于策略的强化学习的目的就是对策略建模
,然后获得贪心策略,当作最优策略;而基于策略的强化学习的目的就是对策略建模 ![]() 。假如利用了上面的Softmax,实际上还是得到了一个策略
。假如利用了上面的Softmax,实际上还是得到了一个策略 ![]() ,实际上已经不是基于值的强化学习了。
,实际上已经不是基于值的强化学习了。
3.2.2 Policy Gradient
策略梯度-Policy Gradient - 知乎
3.2.3深度强化学习
在上面介绍Value-based RL时,针对连续动作空间,可以转而使用Policy-based RL;对于很大的状态空间,比如Atari游戏的每一帧是一个状态,AlphaGo所要面对的围棋棋局的状态,这些状态空间太大,使用 ![]() 来记录状态值函数需要很大的存储空间。所以引入值函数近似(Value Function Approximation),目的是
来记录状态值函数需要很大的存储空间。所以引入值函数近似(Value Function Approximation),目的是
![]()
在学习到Q 或者 V之后,就可以将其代入TD-Learning等等算法求解最优策略。当然值函数近似可以采用的近似方法有很多,比如线性函数近似、决策树近似、神经网络近似等等。最为常用的是线性函数近似和神经网络函数近似。现在基本都是神经网络。
3.3 Actor and Critic
概念:

Advantage Function:

补充1:关于Actor-Critic,像上面一样加了个Advantage就得到A2C算法,如果再加一个异步操作Asynchronous就得到了A3C。
补充2:
立即回报:当前动作作用于当前状态的回报。
长期回报:当前动作对后续状态产生的影响带来的长期回报。
贪婪算法:选择当前最大值(长期回报最大的选择)
 算法:优先选最大值,对于其他值也有一定选择概率。
算法:优先选最大值,对于其他值也有一定选择概率。
4.主要算法
1、Q-learning
Q-learning:Q-learning 是一种无模型、非策略的强化学习算法。它使用 Bellman 方程估计最佳动作值函数,该方程迭代地更新给定状态动作对的估计值。Q-learning 以其简单性和处理大型连续状态空间的能力而闻名。
2、SARSA
SARSA:SARSA 是一种无模型、基于策略的强化学习算法。它也使用Bellman方程来估计动作价值函数,但它是基于下一个动作的期望值,而不是像 Q-learning 中的最优动作。SARSA 以其处理随机动力学问题的能力而闻名。
3、DDPG
DDPG:是一种用于连续动作空间的无模型、非策略算法。它是一种actor-critic算法,其中actor网络用于选择动作,而critic网络用于评估动作。DDPG 对于机器人控制和其他连续控制任务特别有用。
4、A2C
A2C(Advantage Actor-Critic):是一种有策略的actor-critic算法,它使用Advantage函数来更新策略。该算法实现简单,可以处理离散和连续的动作空间。
5、PPO
PPO(Proximal Policy Optimization):是一种策略算法,它使用信任域优化的方法来更新策略。它在具有高维观察和连续动作空间的环境中特别有用。PPO 以其稳定性和高样品效率而著称。
6、DQN
DQN(深度 Q 网络):是一种无模型、非策略算法,它使用神经网络来逼近 Q 函数。DQN 特别适用于 Atari 游戏和其他类似问题,其中状态空间是高维的,并使用神经网络近似 Q 函数。
7、TRPO
TRPO (Trust Region Policy Optimization):是一种无模型的策略算法,它使用信任域优化方法来更新策略。它在具有高维观察和连续动作空间的环境中特别有用。
TRPO 是一个复杂的算法,需要多个步骤和组件来实现。TRPO不是用几行代码就能实现的简单算法。
注:本文前三章主要参考 基于值和策略的强化学习入坑 - 知乎,第四章主要参考7个流行的强化学习算法及代码实现_Imagination官方博客的博客-CSDN博客
往期文章
1.强化学习基础(2)—常用算法总结-CSDN博客
参考文献
1.基于值和策略的强化学习入坑 - 知乎
2.强化学习入门这一篇就够了!!!万字长文_写Bug那些事的博客-CSDN博客
3.如何用简单例子讲解 Q - learning 的具体过程? - 知乎
4.7个流行的强化学习算法及代码实现_Imagination官方博客的博客-CSDN博客