5.4 常用滤波算法
文章目录
- 效果
- 代码
-
- filter.c
- filter.h
效果
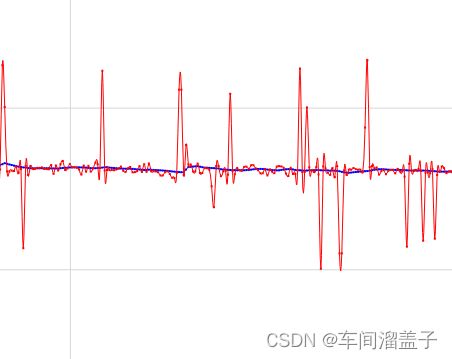
(红色–原始曲线)
(蓝色–滤波后曲线)


限幅滤波会将非常大的单个噪点滤除
中值滤波可以将单个或多个小噪点滤除
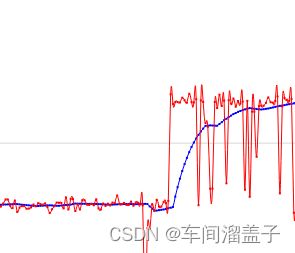
一阶低通滤波,将跳变后连续点变得更为平滑
(红色–原始曲线)
(蓝色–滤波后曲线)
代码
filter.c
#include filter.h
#ifndef _FILTER_H_
#define _FILTER_H_
int limit_filter_test(void); //限幅滤波
int middle_filter_test(void); //中值滤波
int average_filter_test(void); //平均值滤波
int low_pass_filter_test(void); //一阶低通滤波
int weighted_filter_test(void); //加权递推平均滤波法
int shake_filter_test(void); //消抖滤波法
#endif