halcon 手眼标定原理推导
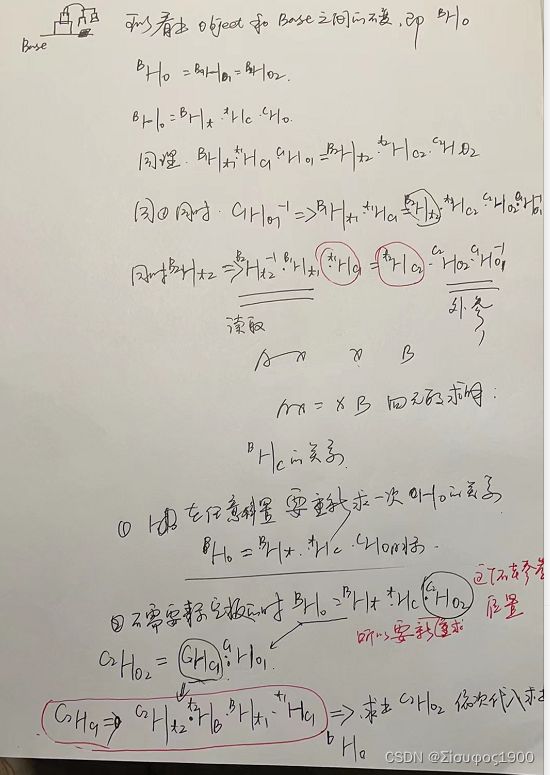
记住一个很关键的点:我们最终求的是base 和Object之间的关系,无论是eye to hand 还是 eye in hand ,找不变的关系,推导中间量,最后推导base 和Object之间的关系。
一、eye to hand

二、eye in hand
halcon 手眼标定坐标系及坐标系之间的转换关系_WarGames_dc的博客-CSDN博客_halcon坐标系转换
三、手眼标定的坐标转换
这个是面试的时候经常问到的,我面了几家机器的还有新能源的,每次都问,要手推,还带说出为啥。
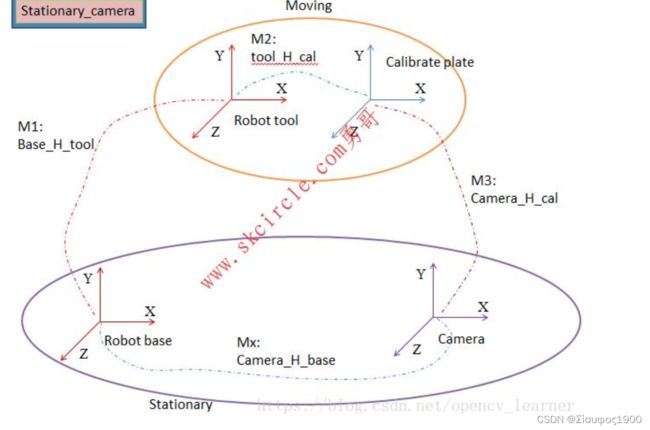
没事我们从头再来。这里涉及到的坐标系有四个:机器人基坐标系base、法兰上的工具坐标系tool、相机坐标系camera和标定板坐标系cal;此外,涉及到了四个关键的4x4齐次转换矩阵。
eye to hand

* Calibration 01: Code generated by Calibration 01
CameraParameters := [0.038072,0.772143,3.75091e-006,3.75e-006,1042.63,770.207,2048,1536]
CameraPose := [-0.0116375,-0.0128823,0.491131,358.368,1.90647,39.3723,0]
*write_cam_par (CameraParameters,'D:/halcon/eyetohand/pose/CameraParameters.dat')
stop ()
* Image Acquisition 01: Code generated by Image Acquisition 01
list_files ('D:/halcon/eyetohand', ['files','follow_links','recursive'], ImageFiles)
tuple_regexp_select (ImageFiles, ['\\.(tif|tiff|gif|bmp|jpg|jpeg|jp2|png|pcx|pgm|ppm|pbm|xwd|ima|hobj)$','ignore_case'], ImageFiles)
poseFiles := []
poseFiles[0] := 'D:/halcon/eyetohand/pose/campose_01.dat'
poseFiles[1] := 'D:/halcon/eyetohand/pose/campose_02.dat'
poseFiles[2] := 'D:/halcon/eyetohand/pose/campose_03.dat'
poseFiles[3] := 'D:/halcon/eyetohand/pose/campose_04.dat'
poseFiles[4] := 'D:/halcon/eyetohand/pose/campose_05.dat'
poseFiles[5] := 'D:/halcon/eyetohand/pose/campose_06.dat'
poseFiles[6] := 'D:/halcon/eyetohand/pose/campose_07.dat'
poseFiles[7] := 'D:/halcon/eyetohand/pose/campose_08.dat'
poseFiles[8] := 'D:/halcon/eyetohand/pose/campose_09.dat'
poseFiles[9] := 'D:/halcon/eyetohand/pose/campose_10.dat'
poseFiles[10] :='D:/halcon/eyetohand/pose/campose_11.dat'
poseFiles[11] :='D:/halcon/eyetohand/pose/campose_12.dat'
poseFiles[12] :='D:/halcon/eyetohand/pose/campose_13.dat'
poseFiles[13] :='D:/halcon/eyetohand/pose/campose_14.dat'
TmpCtrl_ReferenceIndex := 0
TmpCtrl_PlateDescription := 'D:/halcon/eyetohand/caltab.descr'
TmpCtrl_FindCalObjParNames := ['gap_tolerance','alpha','skip_find_caltab']
TmpCtrl_FindCalObjParValues := [1,0.78,'false']
*以下是手眼标定
create_calib_data ('hand_eye_scara_stationary_cam', 1, 1, CalibHandle)
set_calib_data_cam_param (CalibHandle, 0, 'area_scan_division', CameraParameters)
set_calib_data_calib_object (CalibHandle, 0, TmpCtrl_PlateDescription)
* set_calib_data (CalibHandle, 'model', 'general', 'optimization_method', 'nonlinear')
Pose1:=[]
Num:=|ImageFiles|-1
for I := 0 to 13 by 1
read_image (Image, ImageFiles[I])
find_calib_object (Image, CalibHandle, 0, 0, I, TmpCtrl_FindCalObjParNames, TmpCtrl_FindCalObjParValues)
get_calib_data_observ_contours (Caltab, CalibHandle, 'caltab', 0, 0, I)
get_calib_data_observ_points (CalibHandle, 0, 0, I, RCoord, CCoord, Index, PoseForCalibrationPlate)
dev_set_color ('green')
dev_display (Image)
dev_display (Caltab)
dev_set_color ('yellow')
disp_cross (3600, RCoord, CCoord, 6, 0)
dev_set_colored (3)
disp_3d_coord_system (3600, CameraParameters, PoseForCalibrationPlate, 0.01)
read_pose (poseFiles[I], Pose)
Pose1:=[Pose1,Pose]
set_calib_data (CalibHandle, 'tool',I, 'tool_in_base_pose',Pose)
endfor
stop ()
calibrate_hand_eye (CalibHandle, Errors)
get_calib_data (CalibHandle, 'camera', 0, 'base_in_cam_pose', BaseInCamPosePre)
* try
* write_cam_par (CameraParameters,'C:/Users/86188/Desktop/Theendcamer3/CameraParameters.dat')
* write_pose (ToolInCamPose, 'C:/Users/86188/Desktop/Theendcamer3/ToolInCamPose.dat')
* write_pose (CalObjInBasePose,'C:/Users/86188/Desktop/Theendcamer3/CalObjInBasePose.dat')
* catch (Exception)
* do nothing
* endtry
* get_calib_data (CalibHandle, 'calib_obj_pose', [0, TmpCtrl_ReferenceIndex], 'pose', CameraPose)
dev_get_preferences ('suppress_handled_exceptions_dlg', PreferenceValue)
dev_set_preferences ('suppress_handled_exceptions_dlg', 'true')
* 显示误差值
dev_set_preferences ('suppress_handled_exceptions_dlg', PreferenceValue)
dev_display (Image)
Message := 'Quality of the results: root mean square maximum'
Message[1] := 'Translation part in meter: ' + Errors[0]$'6.4f' + ' ' + Errors[2]$'6.4f'
Message[2] := 'Rotation part in degree: ' + Errors[1]$'6.4f' + ' ' + Errors[3]$'6.4f'
disp_message (3600, Message, 'window', 12, 12, 'black', 'true')
*识别
* Image Acquisition 01: Code generated by Image Acquisition 01
* open_framegrabber ('KsjCamera_MT_x86', 1, 1, 0, 0, 0, 0, 'progressive', 8, 'default', -1, 'false', 'default', '1', 0, -1, AcqHandle)
* grab_image_start (AcqHandle, -1)
* while (true)
* grab_image_async (Image, AcqHandle, -1)
* rgb1_to_gray (Image, GrayImage)
* scale_image (GrayImage, ImageScaled, 3.86364, -62)
* threshold (ImageScaled, Regions, 84, 255)
* connection (Regions, ConnectedRegions)
* select_shape (ConnectedRegions, SelectedRegions, 'area', 'and', 6261.18, 115385)
* area_center (SelectedRegions, Area, Row, Column)
*先转世界
* image_points_to_world_plane (CameraParameters,CameraPose, Row, Column, 'm', X, Y)
* pose_invert (BaseInCamPosePre, CamInBasePosePre)
* pose_compose (CamInBasePosePre, CameraPose, ObjInBase)
* pose_to_hom_mat3d (ObjInBase, ObjInBaseHomMat3D)
* affine_trans_point_3d (ObjInBaseHomMat3D, X, Y, 0, Qx, Qy, Qz)
* endwhile
* close_framegrabber (AcqHandle)

eye in hand:
CameraParameters := [0.00540942,-772.779,3.19882e-006,3.2e-006,995.629,706.461,2048,1536]
CameraPose := [-0.000755431,8.62376e-006,0.0876035,0.653457,359.717,272.888,0]
list_files ('D:/halcon/eyeinhand1205/images', ['files','follow_links','recursive'], ImageFiles)
tuple_regexp_select (ImageFiles, ['\\.(tif|tiff|gif|bmp|jpg|jpeg|jp2|png|pcx|pgm|ppm|pbm|xwd|ima|hobj)$','ignore_case'], ImageFiles)
num:=|ImageFiles|
* 将所有的pose文件都提出来放到 poseFiles 的数组中
poseFiles := []
poseFiles[0] := 'D:/halcon/eyeinhand1205/pose/campose_01.dat'
poseFiles[1] := 'D:/halcon/eyeinhand1205/pose/campose_02.dat'
poseFiles[2] := 'D:/halcon/eyeinhand1205/pose/campose_03.dat'
poseFiles[3] := 'D:/halcon/eyeinhand1205/pose/campose_04.dat'
poseFiles[4] := 'D:/halcon/eyeinhand1205/pose/campose_05.dat'
poseFiles[5] := 'D:/halcon/eyeinhand1205/pose/campose_06.dat'
poseFiles[6] := 'D:/halcon/eyeinhand1205/pose/campose_07.dat'
poseFiles[7] := 'D:/halcon/eyeinhand1205/pose/campose_08.dat'
poseFiles[8] := 'D:/halcon/eyeinhand1205/pose/campose_09.dat'
poseFiles[9] := 'D:/halcon/eyeinhand1205/pose/campose_10.dat'
poseFiles[10] :='D:/halcon/eyeinhand1205/pose/campose_11.dat'
poseFiles[11] :='D:/halcon/eyeinhand1205/pose/campose_12.dat'
* 设置参考位置 一般默认是第一张图的位置
TmpCtrl_ReferenceIndex:=0
* 设置第一步的标定板的描述文件
TmpCtrl_PlateDescription:='D:/halcon/eyeinhand1205/caltab.descr'
* 设置在标定的图像中找到标定板的参数
TmpCtrl_FindCalObjParNames := ['gap_tolerance','alpha','skip_find_caltab']
* TmpCtrl_FindCalObjParNames 对应的值
TmpCtrl_FindCalObjParValues := [1,1,'false']
* TmpCtrl_FindCalObjParNames 和TmpCtrl_FindCalObjParValues 在find_calib_object 的时候使用
* ==========================================================================================
* 创建手眼标定的模板
* 第一个参数表示是手在眼上还是手在眼外 这个是手在眼上 所以 'hand_eye_scara_moving_cam'
* 第二个参数:相机的个数
* 第三个参数:标定板的个数
* 最后一个参数表示这个的句柄
create_calib_data ('hand_eye_scara_moving_cam', 1, 1, CalibDataID)
* 设置标定模型中相机的参数
* 第一个参数表示的是标定模型的句柄
* 表示设定标定板中的相机的索引
* 第三个参数:表示是相机的类型,是面阵相机还是线阵相机 area_scan_division 表示面阵相机
* 最后一个参数表示 设置的标定模型中相机的什么参数:这里设定的是内参即CameraParameters
set_calib_data_cam_param (CalibDataID, 0, 'area_scan_division', CameraParameters)
* 设置标定板的资料
* 第一个参数表示的是标定模型的句柄
* 表示设定标定板中的标定板的索引
* 第三个参数:是标定板的描述文件
set_calib_data_calib_object (CalibDataID, 0, TmpCtrl_PlateDescription)
Pose1:=[]
* 从标定的12张图像中找到相对于的标定的的轮廓和mark标定
for I := 0 to |ImageFiles|-1 by 1
read_image (Image, ImageFiles[I])
* 在采集的图像姿态中找到标定板
* Image
* 标定模型的句柄
* 标定模型中相机的索引
* 标定模型中标定板的索引
* I 这个是读入图像姿态的索引
* TmpCtrl_FindCalObjParNames :标定板的参数 的参数,是多个值可以根据不同的情况自己设定
* TmpCtrl_FindCalObjParValues TmpCtrl_FindCalObjParNames对应的值
find_calib_object (Image, CalibDataID, 0, 0, I, TmpCtrl_FindCalObjParNames, TmpCtrl_FindCalObjParValues)
* 从读入的标定图像中得到对应的轮廓信息
* 得到标定的轮廓
* 标定模型的句柄
* marks 标定,像得到什么的, 这里是得到 标定板的
* 相机索引
* 标定板的索引
* 读入标定图像姿态的索引
get_calib_data_observ_contours (Caltab, CalibDataID, 'caltab', 0, 0, I)
* 得到 标定板中黑点对应的坐标:输出一个pose
* 标定模型的句柄
* 相机索引
* 标定板的索引
* 读入标定图像姿态的索引
* 黑点的横坐标
* 黑点的纵坐标
* 黑点的索引
* 输出每一张标定板姿态 [0.00826224, -0.0502468, 3.42284, 2.30472, 0.84261, 264.306, 0]
get_calib_data_observ_points (CalibDataID, 0, 0, I, RCoord, CCoord, Index, PoseForCalibrationPlate)
dev_set_color ('green')
dev_display (Image)
dev_display (Caltab)
dev_set_color ('yellow')
disp_cross (3600, RCoord, CCoord, 6, 0)
dev_set_colored (3)
disp_3d_coord_system (3600, CameraParameters, PoseForCalibrationPlate, 0.01)
*从生成的.dat文件即 poseFiles 读出每对应的pose文件
read_pose (poseFiles[I], Pose)
* 将每一个新的pose 添加到新的数组中
Pose1:=[Pose1,Pose]
* 下面的这句是很重要的 表示的是要生产的姿态的方式:从***到*** 的姿态
set_calib_data (CalibDataID, 'tool',I, 'tool_in_base_pose',Pose)
endfor
* 标定
calibrate_hand_eye (CalibDataID, Errors)
* 从标定模型 得到tc的关系,这个就是我们辛辛苦苦要得到的数据 tool->Carmer 的姿态
get_calib_data (CalibDataID, 'camera', 0, 'tool_in_cam_pose', Tool_CameraPose)
* 从标定模型中(获取参考(世界)坐标系)相对于机械手基础坐标系的关系
get_calib_data (CalibDataID, 'calib_obj', 0, 'obj_in_base_pose', Object_BasePose)
stop ()
dev_get_preferences ('suppress_handled_exceptions_dlg', PreferenceValue)
dev_set_preferences ('suppress_handled_exceptions_dlg', 'true')
* 显示误差值
dev_set_preferences ('suppress_handled_exceptions_dlg', PreferenceValue)
dev_display (Image)
Message := 'Quality of the results: root mean square maximum'
Message[1] := 'Translation part in meter: ' + Errors[0]$'6.4f' + ' ' + Errors[2]$'6.4f'
Message[2] := 'Rotation part in degree: ' + Errors[1]$'6.4f' + ' ' + Errors[3]$'6.4f'
disp_message (3600, Message, 'window', 12, 12, 'black', 'true')
stop ()
create_pose (0.250595,0.05462,-0.058648,0,0,-80.111, 'Rp+T', 'gba', 'point', ToolInBasePose)
* 相机标定的外参
Obj_in_camera := [-0.000755431,8.62376e-006,0.0876035,0.653457,359.717,272.888,0]
pose_invert (Tool_CameraPose, CamInToolPose)
pose_compose (ToolInBasePose, CamInToolPose, CamerInBase)
pose_compose (CamerInBase, Obj_in_camera, ObjectInBase)
stop ()
* Image Acquisition 01: Code generated by Image Acquisition 01
open_framegrabber ('KsjCamera_MT_x64', 1, 1, 0, 0, 0, 0, 'progressive', 8, 'default', -1, 'false', 'default', '4', 0, -1, AcqHandle)
grab_image_start (AcqHandle, -1)
grab_image_async (Image, AcqHandle, -1)
* Image Acquisition 01: Do something
rgb1_to_gray (Image, GrayImage)
threshold (GrayImage, Regions, 9, 27)
connection (Regions, ConnectedRegions)
select_shape (ConnectedRegions, SelectedRegions, 'area', 'and', 207890, 425975)
area_center (SelectedRegions, Area, Row, Column)
* read_cam_par ('C:/Users/admin/Desktop/epson_eye_in_hand/param/cameraParam.cal', CameraParam)
* 通过相机的内外参,将特征点的像素坐标转换成相应的世界坐标
image_points_to_world_plane (CameraParameters,Obj_in_camera, Row, Column, 'm', X, Y)
* write_cam_par (CameraParameters, 'C:/Users/86188/Desktop/campar.dat')
* write_pose (Obj_in_camera, 'C:/Users/86188/Desktop/campose.dat')
* 通过世界坐标系相对于机械手基础坐标系的关系,计算出变换矩阵
pose_to_hom_mat3d (Object_BasePose, base_H_obj)
* Z := [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]
affine_trans_point_3d (base_H_obj, X, Y, 0, Qx, Qy, Qz)
close_framegrabber (AcqHandle)
* 识别
* Image Acquisition 01: Code generated by Image Acquisition 01
上面这个是去年7月份在公司做的,现在没有机器人,等有了重新做一个标定,这个对三维理解太重要了