为容器时代设计的高级 BPF 内核特性
我来自 Isovalent(Cilium 背后的公司),是内核 eBPF 的维护者之一(co-maintainer)。今天给大家分享一些 Cilium(1.9)和 eBPF 的最新进展。
纠正一些关于 eBPF 的错误理解

首先我想纠正一些关于 eBPF 的错误理解与不实描述。
eBPF 是什么?通用目的引擎、最小指令集架构
之前我们讨论 eBPF 时大都集中在网络(networking)和跟踪(tracing)领域, 最近可能将范围扩大到了安全(security)领域 —— 但我想说的是:eBPF 是一个 通用目的执行引擎(general purpose execution engine)。
换句话说,eBPF 是一个最小指令集架构(a minimal instruction set architecture),在设计时两个主要考虑:
将 eBPF 指令映射到平台原生指令时开销尽可能小 —— 尤其是 x86-64 和 arm64 平台,因此我们针对这两种架构进行了很多优化,使程序运行地尽可能快。
内核在加载 eBPF 代码时要能验证代码的安全性 —— 这也是为什么我们一直将其限制为一个最小指令集,因为这样才能确保它是可验证的(进而是安全的)。
很多人像我一样,在过去很长时间都在开发内核模块(kernel module)。但内核模块中引入 bug 是一件极度危险的事情 —— 它会导致内核 crash。此时 BPF 的优势就体现出来了:校验器(verifier)会检查是否有越界内存访问 、无限循环等问题,一旦发现就会拒绝加载,而非将这些问题留到运行时(导致 内核 crash 等破坏系统稳定性的行为)。
所以出于安全方面的原因,很多内核开发者开始用 eBPF 编写程序,而不再使用传统的内核模块方式。
eBPF 提供的是基本功能模块(building blocks)和程序附着点(attachment points)。我们可以编写 eBPF 程序来 attach 到这些 hook 点完成某些高级功能。
eBPF 不是什么?通用目的虚拟机、全功能通用指令集
BPF 是一个通用目的虚拟机(general purpose virtual machine)吗?这是人们经常问的一个问题。不是 —— BPF 并不打算模拟完整的计算机,它只是一个最小指令集和通用目的执行引擎。
BPF 是一个全功能通用指令集吗?也不是。它必须保持最小,这样才能保证可验证和安全。
eBPF 与 C
BPF 在设计上有意采用了 C 调用约定(calling convention)。由于内核是用 C 写的,BPF 要与内核高效地交互,因此也采用了 C。当需要从 BPF 程序中调用所谓的 BPF helper 甚至是真正的内核函数时,这会非常方 便;另外,用户态和内核态之间共享数据(BPF maps)必须越快越好。
目前 ~150 BPF helpers,~30 BPF maps。
BPF C 与普通 C 差异有多大?BPF 校验器可能最清楚地见证了近几年 BPF C 的发展历史。现在我们有了 BPF-to-BPF 函数调用、有限循环(bounded loops)、全局变量、静态 链接(static linking)、BTF(BPF Type Format,在 tracing 场景尤其有用;其 他方面也有用到,使内核成为可自描述的 self-descriptive)、 单个 BPF 程序的最大指令数(instructions/program)从原来的 4096 条放大到了 100 万条。
以上可以看到,BPF 已经具备了很多的基础模块和功能。基于这项功能,我们能解决许多更 加有趣的生产问题。其中之一 —— 也是我接下来想讨论的 —— 就是 Cilium。我们来看它是如何使用 eBPF 以及用来解决什么问题的。
基于 eBPF 的云原生项目:Cilium 简介
Cilium 是一个基于 eBPF 技术的云原生网络、安全和可观测项目。下面简单列举一些特性。
网络功能
通过 CNI 集成到 Kubernetes。
基于 BPF 实现了 Pod-to-Pod 数据转发路径(datapath)。
支持直接路由(direct routing)、overlay、cloud-provider native(例如 AWS)等网 络模式。
支持 IPv4、IPv6、NAT46。
支持多集群路由(multi-cluster routing)。
负载均衡
实现了高度可扩展的 L3-L4(XDP)负载均衡。
能完全替代 kube-proxy,提供 Kubernetes Service 功能。
支持多集群(multi-cluster)。
网络安全
支持基于身份的(identity-based)L3-L7 网络安全
API-aware 安全(HTTP、gRPC 等)
DNS-aware
透明加密
可观测性
Metrics:通过 BPF 收集观测数据和 tracing 数据并导出;包含网络、DNS、安全、延迟、HTTP 等方面的数据。
提供 flow 级别的日志(flow log),并支持设置聚合粒度(datapath aggregation)。
Service Mesh
注入 sidecar 时开销最小(minimized overhead)。
与 Istio 集成。
译者注:用到了sockmap/redirection 做 socket 重定向。
小结
接下来介绍几个最近的新特性(我们在 Cilium 1.9 及内核方面的最新工作)。
深入剖析(一):基于 BPF/XDP/Maglev 实现 Kubernetes Service 负载均衡
首先看基于 XDP/BPF 和 Maglev 算法实现的 Kubernetes Service 负载均衡。
原理
Kubernetes Service 模型中,入口和后端实例位于同一组节点,即每个节点既用于部署容器, 又负责 Service 负载均衡的实现(co-location of service load balancer with regular user workloads on every node)的。换句话说,每个 node 上都实现了 Service 负载均衡的功能。在原生 Kubernetes 中,实现这个功能的组件是 kube-proxy。
译者注:Service 是对服务的抽象,服务包含一个入口和多个后端实例,因此涉及到负载均衡 ,即如何将请求分发到不同后端。但在模型及实现上,入口(负载均衡器)和后端实例 可以是分开部署的(例如负载均衡器部署在独立设备上),也可以部署在一起(负载均 衡器直接部署在运行实例的宿主机上)。
但 kube-proxy 的问题之一是性能很差。Cilium 所做的一项工作就是基于 BPF/XDP 实现了 kube-proxy 的功能(针对南北向流量),显著减少了 CPU 使用量,并达到(某些场景甚至 超过了)DPDK 的性能。
XDP 运行在网络驱动层,因此能直接在驱动层将收到的包再发出去, 这是软件栈中最早能够处理数据包的位置(此时 skb 都还没有创建),因此性能非常高。
转发性能对比(XDP vs DPDK)
以下测试结果基于 Cilium 1.9 及原生 Linux 内核中的 XDP 驱动。
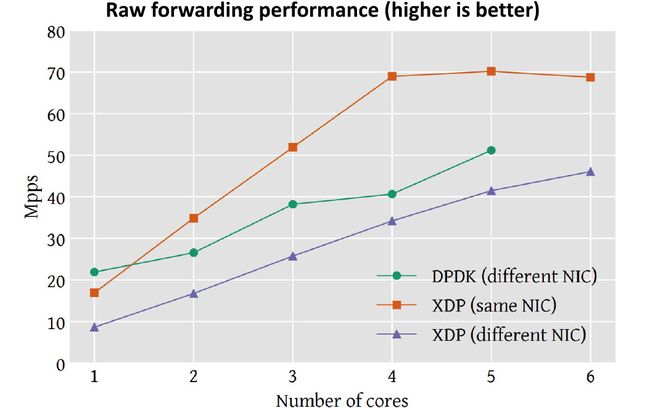
这里测试的是后端 pod 在另一台 node 的场景。三条线分别表示:
DPDK(different NIC):DPDK 从一个网卡收包,然后将包从另一个网卡发出去。
XDP(different NIC):Cilium/XDP 从一个网卡收包,然后将包从另一个网卡发出去。
XDP(same NIC):Cilium/XDP 从一个网卡收包,然后直接将包从当前网卡发出去。
可以看出,XDP(different NIC)的性能已经接近 DPDK;但 same NIC 组,四核 及以上的性能已经远超过 DPDK。
再看 CPU 消耗:

DPDK 是 busy-poll 模型,因此 CPU 一直是 100%,即需要独占一个或多个 CPU。
相比之下,XDP 的 CPU 消耗基本上是线性的,远小于 DPDK 的消耗。
图中还给出了 Linux kernel 收发包的 CPU 消耗作为 benchmark。可以 看到在 5Mpps 时它就已经饱和了,转发性能无法进一步提高。
Source IP 处理:SNAT/DSR
简要重温 Service LB 的 NAT/DSR 模式。
假设 Service 请求到达了 node1,而这个 Service 的 backend pod 在 node2。
SNAT
这种模式下,node1 对源 IP 地址(Source IP)的处理:
请求:做源地址转换(SNAT)
响应:对源地址做反向转换(rev-SNAT)

响应包需要先回到 node1,再回到客户端。来回路径是相同的。
DSR
这种模式下,node1 不需要做 SNAT:
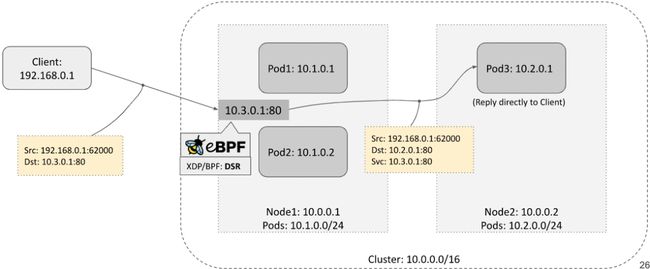
响应包也无需回到 node1,而是直接从 node2 回到客户端。
Destination IP 处理 —— Maglev 负载均衡
上面小节讨论的是对源 IP 地址的处理,接下来看对目的 IP 地址的处理,即,如何选择后端 Pod。
kube-proxy 选择后端 Pod 时都是随机的(select a random backend)。Cilium 1.9 之前也是这个行为,并将这个状态存储到本节点的 BPF conntrack table。
但这里存在一个问题是,如下图所示:
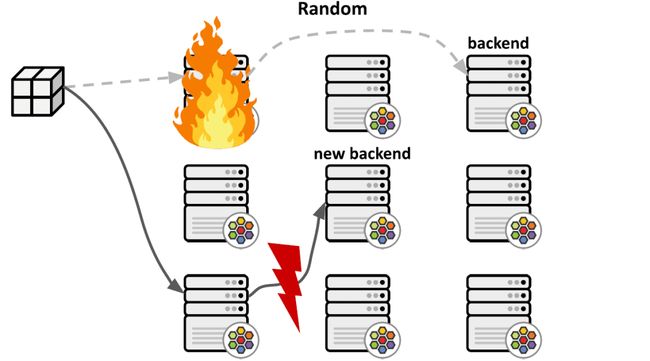
当负责处理某个 Service 的 node 挂掉时,这个连接接下来的包会被转发到另一个 node (例如通过 ECMP)—— 此时还没有问题;
但新 node 没有之前的 service -> backend1 上下文信息(因为这些信息 只存在于 node1 的 conntrack table),因此会随机再选择一个 backend, 假设这里选择了 backend2,然后建立新的映射 service -> backdend2,并将包转 发过去 —— 这里也没问题,能发送过去,但接下来 ——
包到达 backend2 时会被拒绝,因为 backend2 上并不存在这条连接。
总结起来就是:一旦 node 挂掉,所有经过这台 node 的 Service 连接会全部中断。
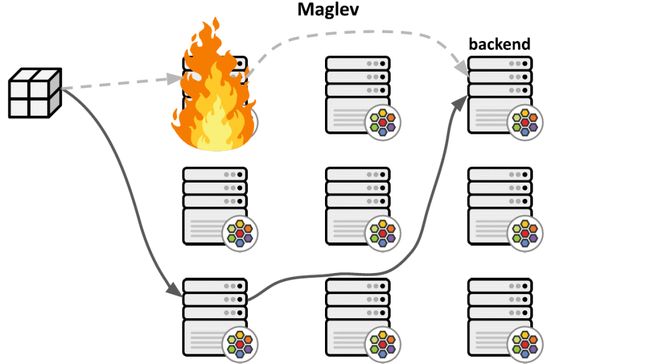
为了解决这个问题,我们在 1.9 中引入了一致性哈希:在 Cilium 中实现了 Google Maglev 一致性哈希算法,用于 BPF/XDP Service 负载均衡。简单来说, 对于同一条 Service 连接,该算法能保证哈希到相同的后端。因此一台 node 挂掉后 ,只要接下来的包能到达其他 node,该 node 就能保证将包转发到原 来的 backend pod,因此连接不会中断,如下图所示:
在实现上:
相比随机方式,这种算法需要使用更多的内存;为了提高内存使用效率, 使用了动态大小的 map-in-map 数据结构:
-
外层:service map
内层:per-service maglev map
根据 tuple 信息做两级查找:
-
第一次查全局的 service map
然后再查找 per-service 的 Maglev map,这个表是由用户态的 cilium-agent 来操作和更新的。
内核 eBPF 改动
为实现以上功能,我们对内核 eBPF 的 map-in-map 做了增强,允许内层 map 的大小是动态的, 见:https://git.kernel.org/pub/scm/linux/kernel/git/torvalds/linux.git/commit/
如果没有这个扩展,那内层 map 只能是固定大小,而很多 Service 可能只有少量后端, 导致 map 的大部分空间都是用不到的,非常浪费内存。
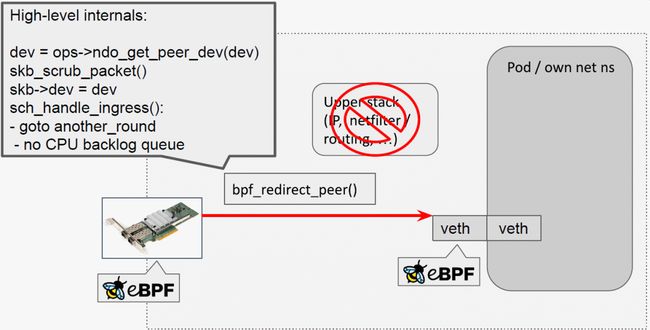
深入剖析(二):基于 BPF 的低延迟转发路径(fast-path)
这里主要是介绍绕过宿主机内核协议栈,直接将包从网卡或容器 redirect 到另一个端(容器或网卡)。
译者注:这些内容在去年的分享中有更详细介绍,见:《Cilium:基于 BPF/XDP 实现 Kubernetes Service 负载均衡》。
进出宿主机的容器流量(Host <-> Pod)
原来需要穿越宿主机的内核协议栈:

现在绕过了宿主机内核协议栈,直接将包从网卡重定向到容器网络设备:
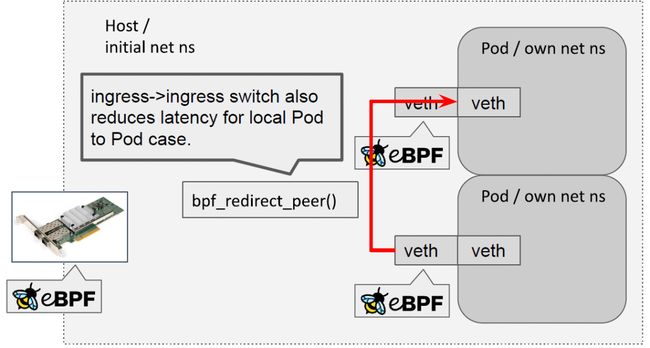
同宿主机的容器流量(Pod <-> Pod)
与前面类似,绕过宿主机内核协议栈,直接重定向:
内核 eBPF 改动
https://git.kernel.org/torvalds/c/9aa1206e8f48
https://git.kernel.org/torvalds/c/b4ab31414970
性能对比
用 netperf 做了一些性能测试。
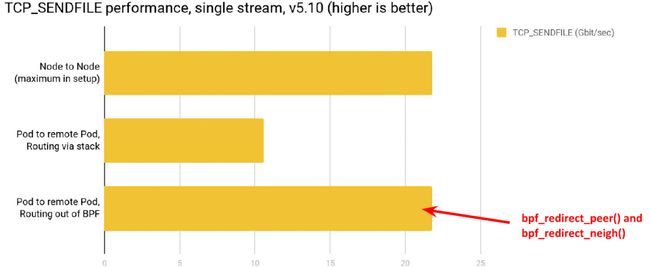
TCP_SENDFILE 性能,三组测试:
node-to-node 转发性能:作为 benchmark 参考。
pod-to-remote-pod,没有使用 fast-path:传统的经过宿主机内核协议栈方式。
pod-to-remote-pod,使用 fast-path:可以看到几乎达到了 node-to-node 性能 —— 理论上的最高性能。
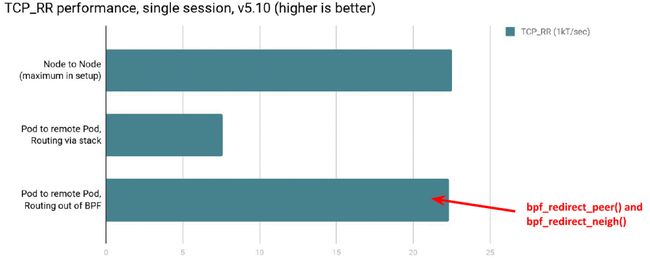
TCP_RR 测试(ping-pong)也是类似的结果:
深入剖析(三):基于 BPF 实现 Pod 限速(rate-limiting)
这个功能也是在最新的 Cilium 1.9 中实现的。
传统方式
传统的 Pod 限速方式:加一个 CNI 插件,通过 CNI chaining 给容器设置 TBF qdisc。甚至还会为了 ingress shaping 设置所谓的 ifb(Intermediate Functional Block)设备。可扩展性差。
这种方式存在很多问题:
效率不高,因为通常情况下这都会涉及到多队列设备(multi-queue devices),需要竞 争 qdisc 锁,不是一种无锁方式。
通过 ifb 设备来做整形(shaping)也不是合适,因为它占用了很多的资源来做 ingress 整形,效果却不怎么样。整形都应该是在出向做的。
整体上这种方式并不是可扩展的。
Cilium 方式:BPF EDT
在 Cilium 中,我们基于 multi-queue 和 BPF,实现了一种称为 Earlist Departhure Time(EDT,最早离开时间) 的无锁(lockless)方式来对 Pod 进行限速。
工作原理如下图所示:
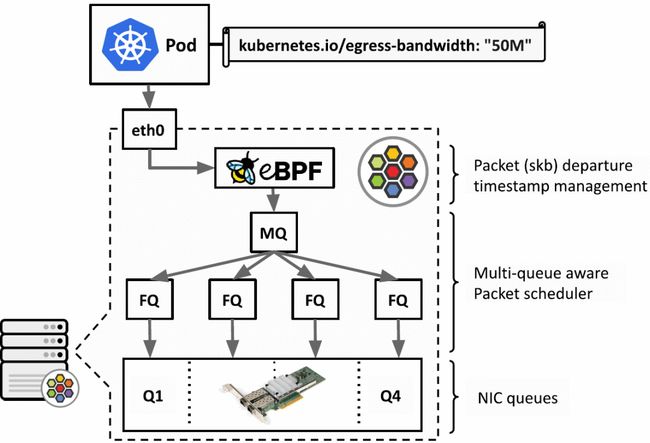
在 Kubernetes 里为 Pod 设置限速带宽:kubernetes.io/egress-bandwidth: "50M"。
Cilium agent 生成 BPF 程序。
BPF 对流量进行分类,根据用户定义的限速带宽,为每个包设置一个离开时间( departure time),其实就是一个时间戳 skb->tstamp。
在物理设备上设置 FQ qdisc,FQ qdisc 会根据这个时间戳对包进行调度。保证不会早于这个时间戳将包发送出去。
性能对比
下面是基于一些生产流量所做的测试。
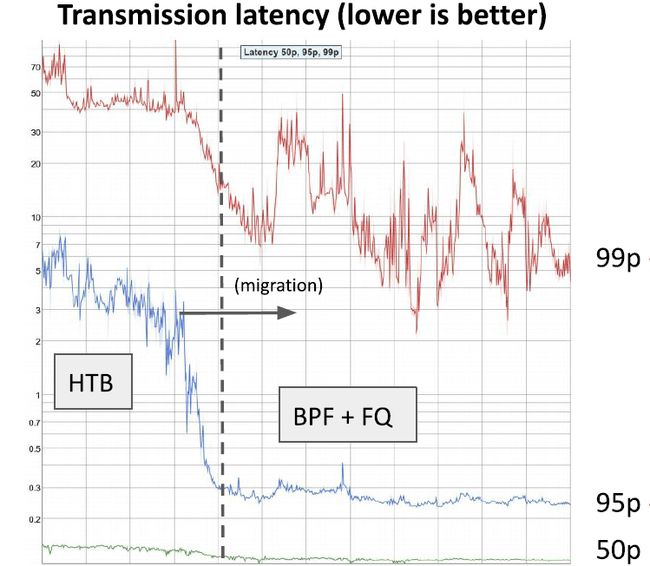
左边是传统方式 HTB,右边是 Cilium 方式 BPF+FQ,Y 轴是取了对数(log)的。总结:
p99:延迟降低了 10x
p95:延迟降低了 20x
总结
与其他内核子系统不同,BPF 在内核中的位置非常特殊,因此能极其高效地解决一些复杂的生产问题。而其他任何内核子系统,都无法只依靠自身解决这些问题。
这次分享的主要是网络方面,但其实 BPF 也已经在跟踪、安全等领域大展拳脚,而且 还有更多更多的可能性正在被发掘。此外,我仍然觉得 BPF 才刚刚开始( feels it’s at the very beginning)。
Cilium 以 BPF 为核心,将这项技术带入了主流的 Kubernetes 社区。
译者注:推荐阅读:《大规模微服务利器:eBPF 与 Kubernetes》
另外一件可喜的事情是,GKE(Google Kubernets Engine)已经宣布将 Cilium 作为其下一 代 dataplane。因此,如果是在 GKE 上创建 Kubernetes 集群,那你已经能原生地使用了 Cilium 了。
原文链接:https://fosdem.org/2021/schedule/event/containers_ebpf_kernel/
译文链接:http://arthurchiao.art/blog/advanced-bpf-kernel-features-for-container-age-zh/
Kubernetes管理员认证(CKA)培训
本次CKA培训在北京开班,基于最新考纲,通过线下授课、考题解读、模拟演练等方式,帮助学员快速掌握Kubernetes的理论知识和专业技能,并针对考试做特别强化训练,让学员能从容面对CKA认证考试,使学员既能掌握Kubernetes相关知识,又能通过CKA认证考试,学员可多次参加培训,直到通过认证。点击下方图片或者阅读原文链接查看详情。
