INS/GNSS组合导航(一)全球导航卫星系统对比
0.概述
自20世纪90年代以来,全球共建成了四大主流全球卫星导航系统,主要有美国GPS 、俄罗斯GLONASS 、欧空局Galileo和中国的BDS(北斗导航系统)以及部分区域导航系统和增强系统。
上述四大主要卫星导航系统使用不同的信号提供公开服务和受限制的服务。公开服务能够对所有拥有合适装备的用户提供服务,而受限服务仅对授权用户开放。
区域卫星导航系统,主要有日本的准天顶卫星导航系统( quasi - zenith satellite system , QZSS )和印度的区域卫星导航系统( indian regional navigation system , IRNSS ),以及空基和地基增强系统。
1.GPS
NAVSTAR GPS 首先由美国政府所研制,用作军用导航系统。GPS 由GPS指挥部控制,其是在国防部( department of defense , DoD) 资助下进行运作。第一颗可运行的原型卫星于1978 发射,在1993 年末宣称具备初步运行能力( initial operational capability , IOC) ,在1994 年末具备了完全运行能力(full operational capability , FOC) 。
GPS为导航用户提供两类服务:一种称为标准定位服务(standard positioning service , SPS) 的公开或民用服务,和一种称为精密定位服务(precise positioning service, PPS) 的受限或军用服务。SPS 对所有具有合适设备的用户提供定位服务,而PPS 仅仅对美国政府授权的用户提供定位服务,包括美国和NATO 军队及他们的供货商, PPS 信号为加密信号。
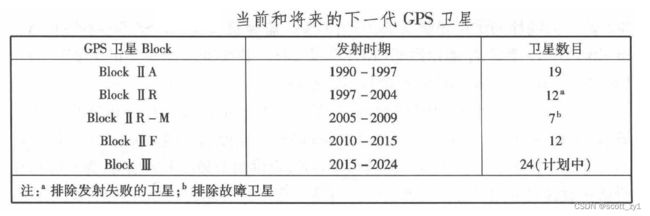
下表列举了当前的和计划的GPS 卫星。从20 世纪90 年代末开始, GPS正在执行一个现代化的过程,目的是改善控制段、改善卫星设计和为SPS 及PPS用户引入另外的信号体制,Block III 卫星将引入新的信号体制,并且将广播一些功率较高的信号。到2013年为止,在好的接收条件下,基本的SPS 水平定位精度大约为3.8m( 1σ) ,垂直定位精度大约为6.2m( 1σ) ,而PPS 水平定位精度大约为1.2m(1σ) ,垂直定位精度大约为1.9m (1 σ) 。现代化后的SPS 定位精度与PPS 相当。
2.GLONASS
与GPS 并行发展, GLONASS ( global ' naya navigatsionnaya sputnikovaya sistema) 从20 世纪70 年代中期由苏联政府开始建设,苏联解体后, GLONASS 由俄罗斯继续开发,主要用作军用导航系统。和GPS 一样, GLONASS 提供民用和军用导航定位服务。第一颗GLONASS 卫星于1982 年发射升空。整个GLONASS 星座于1995 年简单地完成。但是,由于俄罗斯财政问题和GLONASS 卫星相对短的寿命, GLONASS 星座上的卫星数目迅速减少,到2001 年星座上仅6 颗可用卫星。GLONASS 现代化项目被提上日程,主要包含重建GLONASS 星座、引入新的信号和升级控制段。在2010 年完成了18 颗卫星的配置,具备初步运行能力(IOC) 。接下来在2011 年完成了24 颗卫星全星座的配置。
下表列举了当前和计划的下一代GLONASS 卫星。GLONASS -M 卫星仅仅广播频分多址信号,每一颗卫星在不同的频率上广播同-PRN 码。GLONASS -K卫星还附加广播CDMA 信号,同时增加了搜救服务( search - and - rescue ,SAR) 。当现代化完成之后, GLONASS 能提供和GPS 一样精度的定位服务。

3.Galileo
伽利略(Galileo) 卫星导航系统的开发最初由欧盟(European Union , EU) 和欧洲航天(European Space Agency , ESA) 于1999 年提出。第一颗试验卫星GIOVE - A 于2005 年发射升空,计划于2015 年具备初步运行能力(18 颗卫星配置) ,于2016 年具备完全运行能力(26 颗卫星) 。与GPS 和GLONASS 不同, Galileo设计为纯粹的民用导航系统,它由GNSS 监督管理局(GNSS Supervisory Authority, GSA) 管理,主要由欧盟(EU) 资助发展。许多非欧洲国家正在参与Galileo的发展建设,但是不涉及到项目的核心技术。
Galileo 最初提供两种导航服务:开放服务(open service, OS) 和公共规范服务(public regulated sevice , PRS) , Galileo 同样提供搜索救援( search - and - rescue, SAR) 服务 。Galileo 开放服务(OS) 提供两个频段上的信号,为所有具有合适接收设备的用户提供免费服务。当具备完全运行能力(FOC) 之后, Galileo 将提供和GPS 现代化SPS 服务相同的定位性能:水平定位精度2m (1 σ) ,垂直定位精度4m( 1σ) 。 Galileo 开放服务( OS) 可能在其他服务之前开始实行。
公共规范服务(PRS) 是一个受限制的服务,设计目的是为欧盟成员国的信任用户如急救、安全和军队提供高完好性、连续性和抗干扰服务。然而其定位精度比开放服务( OS) 精度略低,定位精度为:水平定位精度3m( 1σ) ,垂直定位精度6m(1σ) 。公共规范服务(PRS) 不是一个专用的军用服务,但是它的操作方式和GPS PPS 相类似,即在两个频段上采用加密信号。对于公共规范服务(PRS) ,基于安全方面考虑,只会公开一些有限的信息。
进一步的导航服务:生命安全服务( safety - of -life , SOL) 和商业服务(commercialservices , CS) 在不久的将来可能会实现。生命安全服务(SOL) 和开放服务( OS) 使用同样的信号,但是增加了信号的完好性和认证数据,这些数据用来确定Galileo 信号的真实性,防止被欺骗(虚假信号的发射) 。商业服务( CS) 被认为是一个受限服务,将对那些愿预付费的用户提供改善性能的服务。
4.“北斗”(BDS)
"北斗",在2007-2012 年期间通常称之为"Compass" ,已经发展到第三个阶段。第一个阶段的试验系统,使用双向测距。使用GNSS 技术的第一颗卫星于2007 年发射。第二阶段于2012 年完成,使用12 颗卫星,对中国和及其周围区域提供局域的GNSS 导航服务。2020年6月23日北斗三号最后一颗全球组网卫星即第五十五颗导航卫星发射成功,标志着北斗导航三期工程全面建设完成。2020年7月31日北斗三号全球卫星导航系统正式开通,比计划时间提前半年完成。
5.区域导航系统(日本、印度)
虽然日本的QZSS (准天顶卫星导航系统)信号能够覆盖东亚和大洋洲的大部分区域,但是在日本,QZSS主要为汽车和个人接收机用户提供导航服务。对于日本这样一个多山和高楼林立的国家, QZSS 定位服务通过增加可见卫星数目来增强GPS 。QZSS 也能够提供高分辨率的差分修正服务 。首颗QZSS 卫星于2010 年发射,计划于2013年具备FOC 能力。
印度IRNSS 的目的是为印度提供一个完全独立的GNSS 服务。它将由印度政府单独控制,计划在2014-2015 年可以使用,于2013 年发射第一颗卫星。覆盖经度为40°~140°的区域,在印度国内,水平和垂直定位精度将为10m 左右( 1σ) 。
6. 增强系统
一个GNSS 增强系统有两种定义:广义的定义和狭义的定义。广义的增强系统包含能够对GNSS 提供如下补充功能的任意系统:提供差分修正提高精度、提供辅助数据加速信号捕获和提供完好性预警使得用户免受错误的GNSS 信号影响 。到2010年为止, GPS 控制段仅仅监测PPS 信号的健康状态,然而由于上行调度以及传统导航电文格式的限制,向用户告警需要大约2h 的时间。一些学者将增强系统认为是一个GNSS 系统的第四段 。
增强系统狭义的定义是为了满足关键安全应用的需求,如民用航空,提供差分修正和完好性预警的系统。满足该定义存在两种主要类型的增强系统:空基增强系统( space - based augmentation system , SBAS) ,主要服务大的国家或是小的大陆,通过静止地球轨道卫星向用户广播;地基增强系统(ground - based augmentation system , GBAS) ,服务于诸如机场等局部地区,它通过地面发射设备广播给用户设备,它能够提供比SBAS 更高精度的导航服务。
到2010年为止,有6个SBAS 系统处于不同的发展阶段,下表中对它们进行了概述。每一个SBAS 系统采用几十个基站网络对它所覆盖区域的GNSS 信号进行监测。只有在参考基站覆盖的区域,差分修正才有效。然而,在每一颗静止地球轨道卫星的覆盖区内,都可以使用卫星信号的故障预警信息。静止地球轨道卫星覆盖范围为纬度在-70°~70°,经度在70°以内。通过增加参考基站,一个SBAS 系统全服务覆盖区域可以在卫星信号覆盖区内扩展。

SBAS 系统差分修正包含单个卫星时钟和星历数据,同时也包含适用于任何GNSS 信号的电离层模型的系数。到2010年为止, WAAS 、EGNOS 和MSAS 仅仅对GPS 卫星提供完好性预警、时钟和星历修正。在EGNOS 上增加称为多星座区域系统( multi - constellation regional system , MRS) 的Galileo 数据的建议正在考虑当中。SDCM 将同时发射GPS 和GLONASS 修正,但是数据仅仅对覆盖区域内的可见卫星有效。
一些SBAS 信号同样可以用来测距,增加覆盖和辅助用户设备进行完好性监测。
GBAS 差分修正和完好性数据在108MHz ~ 118MHz 频率波段上广播,在许多国家的机场配有GBAS 系统,使得GPS 能够用于Ⅰ类着陆。满足Ⅱ类Ⅲ 类着陆需求的研究和发展正在进行当中。在美国, GBAS 有时也称为区域增强系统(local area augmentation system , LAAS) ,而军用联合精确方法和着陆系统( joint precision approach and langding system , JP ALS )是基于GBAS 的。GBAS 概念能够扩展到陆基的类GPS 发射器,也叫伪卫星,能够提供附加的测距信号。
与此同时,在民用航空领域, GNSS 与惯性导航、诸如气压高度计的其他传感器和机载完好性监测等进行集成称为机载增强系统( aircraft - based augmentation system , ABAS)。
7.系统兼容性
在冷战期间, GPS 和GLONASS 最初主要用作军用系统,对它们之间的兼容性不做要求。通过使用不同的轨道,可以避免卫星之间发生物理碰撞,并且由于使用不同频率的信号,信号的干扰不是问题。
在20 世纪90 年代末开始发展的Galileo 系统,绝大多数的GNSS 用户为民用用户。已经意识到,已存在的使用GPS 开放服务的用户除了使用GPS 外,将最大可能会使用Galileo 。因此在设计Galileo 开放服务时,应使得与GPS 使用同一频率的双标准用户设备的代价最小。这就会出现一个对GPS 干扰的考虑,会促使美国和欧盟进行双边协商,来解决Galileo 和现代的GPS 信号格式兼容性问题。
接下来,中国和俄罗斯因为相似的原因宣称计划使用同一频率。在2005 年末在联合国的资助下,这促使了国际GNSS 委员会(International Committee GNSS , ICG) 的建立。ICG 为GNSS 服务提供者提供一个多变协商的论坛。
到2010年为止,所有的GNSS 卫星(不包含IRNSS) 计划大约到2020 年发射开放服务的信号,这些信号使用共同的频率和调制方法。这对于诸如密集的市区和室内的恶劣环境中的用户来说,是有好处的。但是在开放区域,这将增加卫星间的干扰,使得整个系统的性能下降。
兼容性的进一步要求是,由于不同的系统使用不同的参考系和时间基准,它们之间要求对齐。GPS 使用的是WGS84 坐标系,而Galileo 使用的是GTRF 坐标系,两个坐标系都是基于ITRF系。WGS84 、GTRF 和ITRF系差别仅仅只有几厘米,因此仅仅对于高精度用户才会产生问题。GLONASS 采用的是PZ -90.02 坐标系。该坐标系与ITRF 系对齐,原点相差0.4m, ,"北斗"使用的是CGCS2000坐标系,也与ITRF系对齐。但是所有的4 个系统使用不同的时间基准。
对于多星座GNSS 用户设备来说,存在一个明确的需求:在挑战环境下提高定位解的可用性,通过平均掉多测量值的噪声和误差源来提高定位精度,和提高基于一致性的完好性监测的鲁棒性 。在2010~2012 年期间,大多数厂家尽管增加了成本和由于FDMA GLONASS 信号引起的复杂性,还是设计了混合的GPS/GLONASS 双系统用户设备。俄罗斯已经对不能接收GLONASS 信号的GNSS 用户设备实行了进口限制。
使用两个GNSS 星座的性能胜过优先使用一个星座的。但是,当多于两个星座的卫星可以使用时,许多设备厂家为了限制硬件成本和功耗,将选择众多信号中的一个子集(类似4G手机不能同时接受两家运营商的4G信号)。选择准则包括信号的设计、卫星时钟和星历数据的质量及提供即时的完好性预警。
8. GNSS信号频率
每一颗GNSS 卫星典型将发射大约10 种信号,包含3 个或者4 个频点。不同的信号包含开放和受限服务,而频率的不同可进行电离层传播延迟修正,可以减少干扰对单频的影响并可以辅助载波相位定位 。而且不同类型的信号可应用于不同的应用场景和工作条件。一些接收机使用单类型的信号,如GPS C/A 码,而其他一些接收机使用每颗卫星的多类型信号。下表描述了大部分GNSS 所使用的频点。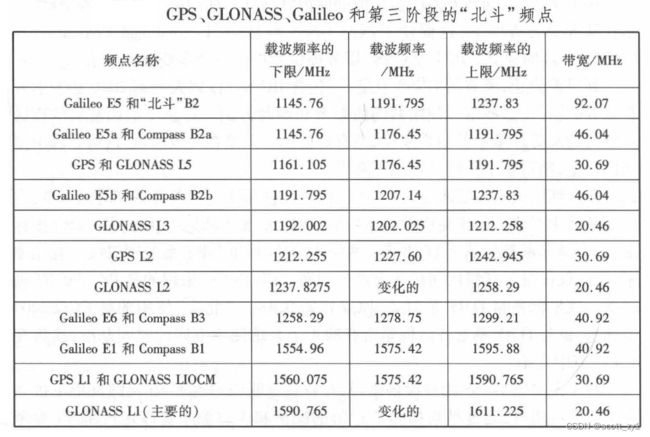
9.参考文献
GNSS 与惯性及多传感器组合导航系统原理 (第二版)
Fundamentals of Inertial Navigation,Satellite-based Positioning and their Integration