lidar_camera_calib学习笔记(激光雷达相机标定)
参考项目链接:https://gitee.com/manifold/lidar_camera_calib/tree/master
- 项目提供的bag中的信息

- pointgrey.yaml 文件内容
%YAML:1.0
K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1061.37439737547, 0, 980.706836288949,0, 1061.02435228316, 601.685030610243,0, 0, 1]
d: !!opencv-matrix
rows: 5
cols: 1
dt: d
data: [-0.149007007770170, 0.0729485326193990, 0.000257753168848673, -0.000207183134328829, 0]
Camera.width: 1920
Camera.height: 1200
grid_length: 0.15
corner_in_x: 7
corner_in_y: 5
- launch文件配置
<?xml version="1.0"?>
<launch>
<node pkg="ilcc2" type="get_image_corners_bag" name="get_image_corners_bag" output="screen">
<param name="bag_path_prefix" value= "/home/stone/Desktop/rosws/src/bag/2018-12-03-" />
<param name="bag_num" value= "6" />
<param name="camera_name" value= "pointgrey" />
<param name="image_topic" value= "/camera/image_raw " />
<param name="yaml_path" value= "pointgrey.yaml" />
<param name="save_image_flag" value= "true" />
</node>
</launch>
- 运行指令
roslaunch ilcc2 image_corners.launch
- 得到的结果(去畸变后的图片)

- 对应的代码
#include 图像提取标定板角点libcbdetect
激光提取标定板角点ilcc2
- 运行程序
roslaunch ilcc2 lidar_corners.launch
-
程序会弹出两个pcl_viewer,分别是visual_corners与visual_chessboard
-
打开rviz ,更改Fixed Frame 并添加PointCloud2 (把topic改为volodyne_points)

-
选中rviz的Publish Point功能,在标定板点云的中间点一个点.之后在visual_chessboard界面会显示提取结果,提取结果用粉色点云表示.

-
若提取正确,按o键后,visual_corners界面会显示角点提取结果
-
一共有两张标定板的图,一张是在激光原点,一张是在原始位置.其中在原始位置的标定板有粉色点,也就是激光角点.
-
最终正确的结果如下图所示.粉色角点提取正确.按k键确认.

-
循环操作完成其他的bag
标定激光与相机外参
- 运行程序
roslaunch ilcc2 calib_lidar_cam.launch
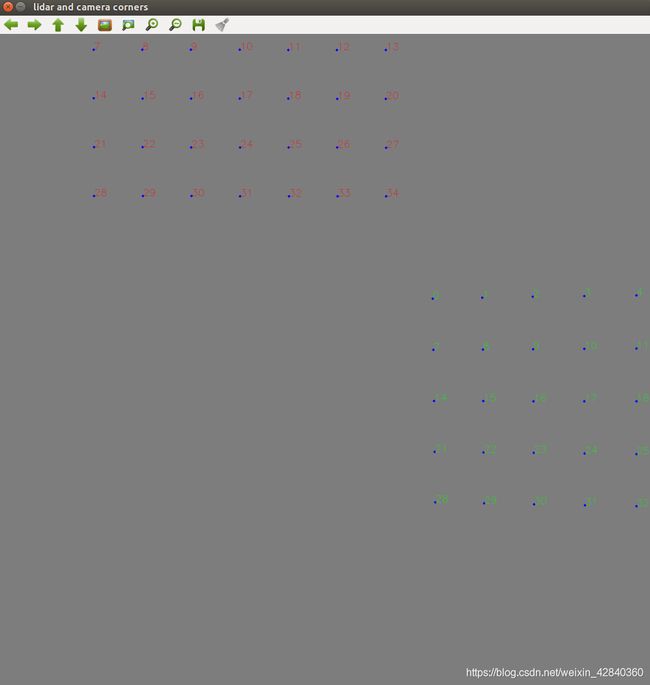
-
若初始外参设置正确,在lidar_camera_corners窗口中可以看到绿色相机角点与红色激光角点.该主要是为了确保lidar角点与相机角点的对应关系一致,只要红色点和绿色的排序方式一样即可(一般不会出问题,按任意键跳过即可).

-
标定好之后,会显示重投影结果(如上图所示).最终标定的结果会在终端输出,也会保存为bin文件存在config文件夹下.
激光投影回相机效果
roslaunch ilcc2 pcd2image.launch
rosbag play xxx.bag -l
- 对应代码
#include (y)[x*3] = 255;
// image.ptr(y)[x*3+1] = 0;
// image.ptr(y)[x*3+2] = 0;
counter++;
}
}
// std::cout << counter << " points ok\n";
cv::resize(rectifyImage, rectifyImage, cv::Size(rectifyImage.cols/1, rectifyImage.rows/1));
cv::imshow("img_liar_point", rectifyImage); //矫正后的图像
cv::waitKey(5);
}
void callback_LidarCam(const sensor_msgs::PointCloud2ConstPtr& msg_pc,
const sensor_msgs::ImageConstPtr& msg_img)
{
// ROS_INFO_STREAM("Velodyne scan received at " << msg_pc->header.stamp.toSec());
// ROS_INFO_STREAM("image received at " << msg_img->header.stamp.toSec());
pcl::PointCloud<pcl::PointXYZI> input_cloud;
pcl::fromROSMsg(*msg_pc, input_cloud); //转换为模板点云fromROSMsg
cv::Mat img = cv_bridge::toCvCopy(msg_img,"bgr8")->image; //image从ros转为opencv常用格式
processData(img, input_cloud.makeShared());
}
int main(int argc, char** argv){
ros::init(argc,argv,"pcd2image");
ros::NodeHandle nh;
std::string package_path = ros::package::getPath("ilcc2");
ROS_INFO("ilcc2 package at %s", package_path.c_str());
std::string yaml_path, image_topic, lidar_topic;
std::string extrinsic_file;
ros::NodeHandle nh_private("~");
nh_private.param<double>("distance_valid", distance_valid, 5);
nh_private.param<std::string>("extrinsic_file", extrinsic_file, "/process_data/pose.bin");
nh_private.param<std::string>("yaml_path", yaml_path, "30w.yaml");
nh_private.param<std::string>("image_topic", image_topic, "/front");
nh_private.param<std::string>("lidar_topic", lidar_topic, "/velodyne_points");
std::string extrinsic_path = package_path + extrinsic_file; //外参路径
ROS_INFO("load T_lidar2cam from %s", extrinsic_path.c_str());
image_corners_est = ImageCornersEst::Ptr(new ImageCornersEst(package_path+"/config/"+yaml_path, true) ); //内参路径
image_corners_est->txt2extrinsic( extrinsic_path );
message_filters::Subscriber<sensor_msgs::PointCloud2> cloud_sub(nh, lidar_topic, 2); //点云接收
message_filters::Subscriber<sensor_msgs::Image> image_sub(nh, image_topic, 2); // 图像接收
typedef sync_policies::ApproximateTime<sensor_msgs::PointCloud2, sensor_msgs::Image> MySyncPolicy; //时间戳同步
Synchronizer<MySyncPolicy> sync(MySyncPolicy(2), cloud_sub, image_sub);
sync.registerCallback(boost::bind(&callback_LidarCam, _1, _2)); //回调函数
ROS_INFO("waiting for lidar image topic %s %s", lidar_topic.c_str(), image_topic.c_str());
while (ros::ok())
{
ros::spin();
}
}