games101作业七--光线追踪--详细知识点总结(附代码)
计算机图形学课程作业总结,同课程慎重Ctrl C/V
文章目录
- 1. 光线追踪算法
-
- 光线追踪的准备工作
- Moller Trumbore算法:
- rayTriangleIntersect()函数
- 2. 光线追踪包围盒加速算法
-
- 1. AABB 包围盒又称 轴对齐包围盒
- 2. 光线与包围盒(AABB)的相交检测算法
- 3. 三维空间的拓展
- 4. 包围盒模型的算法
- 3. 层次包围盒BVH加速
-
- 1. 前述问题
- 2. BVH层次包围盒
- 4. 最终渲染函数 Render() && castRay()
-
- 1. Render()函数
- 2. castRay()函数
- 5. Debug处理
-
- 1. fopen函数
- 2. C2039 “optional“: 不是 “std“ 的成员
- 6. games101的一些前置作业:
-
- games101作业五
- games101作业六
- games101作业七
下面是一做本次实验的一些算法知识总结:
1. 光线追踪算法
在光线追踪中最重要的操作之一就是找到光线与物体的交点。一旦找到光线与物体的交点,就可以执行着色并返回像素颜色。因此 光线的生成和光线与三角的相交在光线追踪算法 中至关重要!!
光线追踪的准备工作
光线追踪的一些假设:
- 出发点是一个点
- 光源是点光源
- 场景物体的反射为镜面反射
光线投射步骤:
- 从出射点穿过成像平面打出一根光线到场景中
- 找到与场景最近的交点
- 将交点与光源连接,判断是否在阴影中
- 计算着色情况写回像素中
递归光线追踪:
- 光线不仅回反射而且会折射,然后再与其他物体进行反射
- 每次反射有能量损耗,若没有损耗则无数次后的累加会变成白色
- 递归设置一个最大次数
确定光线与场景的交点:
- 光线方程
- 以o为起点 d为方向(单位向量)t为时间 r(t) = o+ td 0<=t<∞
- 在隐式几何中,可以直接通过将光线方程带入表达式就可以进行计算;
- 在显示几何中,需要将几何体中每一个三角形面进行判断,
具体方法如下:- 几何面用 一个点 和 一个法线 表示平面 (p-p’)·N = 0;
- 将光线方程r(t)带入光线方程中;
- 求出交点,判断交点是在三角形内,还是在三角形外,若在内侧则是三角形的交点;
- 判断交点在三角形内外侧的方法在前面章节中学习过

Moller Trumbore算法:
射线三角相交算法:可以更快的求出三角形与射线的交点
- P0 P1 P2为 三角形的三个顶点
- 光线方程为 r(t) = o+ td 0<=t<∞
- 通过解出来参数``E1 E2 S S1 S2`参数的定义解出来交点。
rayTriangleIntersect()函数
rayTriangleIntersect(): 判断光线是否与三角形相交。
bool rayTriangleIntersect(const Vector3f& v0, const Vector3f& v1, const Vector3f& v2, const Vector3f& orig, const Vector3f& dir, float& tnear, float& u, float& v)v0, v1, v2 是三角形的三个顶点,orig 是光线的起点,dir 是光线单位化的方向向量。tnear, u, v 使用下述算法推导的 Moller-Trumbore 算法来更新的参数
bool rayTriangleIntersect(const Vector3f& v0, const Vector3f& v1, const Vector3f& v2, const Vector3f& orig, const Vector3f& dir, float& tnear, float& u, float& v) { // TODO: Implement this function that tests whether the triangle // that's specified bt v0, v1 and v2 intersects with the ray (whose // origin is *orig* and direction is *dir*) // Also don't forget to update tnear, u and v. Vector3f E1 = v1 - v0; Vector3f E2 = v2 - v0; Vector3f S = orig - v0; Vector3f S1 = crossProduct(dir, E2); Vector3f S2 = crossProduct(S, E1); float n = 1.0f/dotProduct(S1, E1); Vector3f res(dotProduct(S2,E2),dotProduct(S1,S),dotProduct(S2,dir)); res = n*res; tnear = res.x; u = res.y; v = res.z; if(tnear > 0.f && 1-u-v>=0.f && u>=0.f && v>=0.f) return true; else return false; }

2. 光线追踪包围盒加速算法
在显式几何计算交点时当面足够多的时候,计算起来是十分耗费时间了,因此如何优化十分关键。AABB模型就是加速计算光线与场景交点的方法
1. AABB 包围盒又称 轴对齐包围盒
AABB 包围盒就是采用一个长方体将物体包裹起来,进行两个物体的相交性检测时仅检测物体对应包围盒(包裹物体的长方体)的相交性。
另外,AABB 包围盒有一个重要特性,那就是包围盒对应的长方体每一个面都是与某个坐标轴平面平行的,因此,AABB 包围盒又称了 轴对齐包围盒 。
有了上述约定后,确定 AABB 包围盒就简单多了,仅需要记录 6 个值即可,这 6 个值分别代表包围盒在每个坐标轴上的最小值与最大值,即 xmin、xmax、ymin、ymax、zmin、zmax。
2. 光线与包围盒(AABB)的相交检测算法
下面是光线与物体相交的三种不同情况

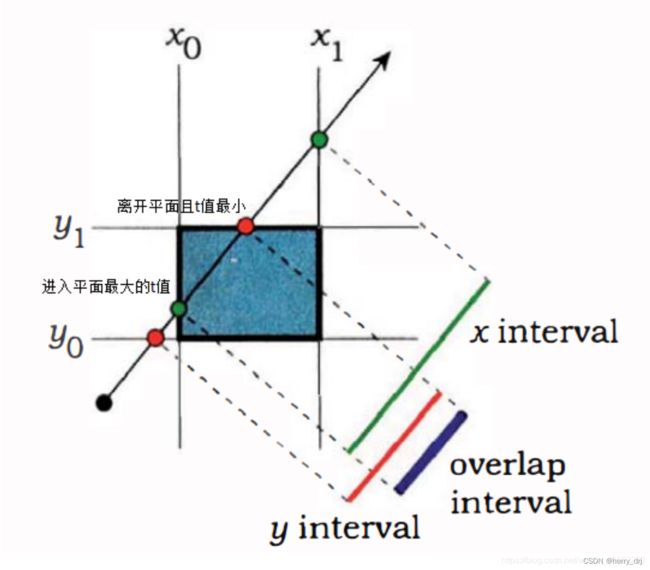

观察上述三幅图可以得出,只要发生区间交叠,光线与平面就能相交,
那么区间交叠出现的条件便是:光线==进入平面处的最大t值==小于光线==离开平面处的最小t值==
那么问题就变成了如何求光线进入平面处的最大t值以及光线离开平面处的最小t值
这个问题通过 线与平面相交 的参数方程求解就可以了。
- 几何面用 一个点 和 一个法线 表示平面 (p-p’)·N = 0;
- 将光线方程
P = r(t)代入光线方程中;- 求出交点,找出对应的t值;
3. 三维空间的拓展
- 增加一对平面,判断三对面的相交时间tmin,tmax。
- 求出tmin最大值,tmax最小值。
- 若tmax-tmin大于0则说明光线与包围盒相交。
- AABB有交点当且仅当(tmin
=0 )- 几种tmin 或 tmax 为负值的特殊说明:
-tmax<0说明包围盒在光线背面,无交点(我们假设光源是一个点,如果包围盒在背面是不会有光传播到的)。
-tmax>=0 且tmin<0说明光源在包围盒中。
在下面的例子中用盒子8个顶点斜对角线的两个点的xyz坐标 作为平面的值 进行判断

4. 包围盒模型的算法
IntersectP() : 判断光线是否与盒子相交
// 判断光线是否与盒子相交 用盒子8个顶点斜对角线的两个点的xyz坐标 作为平面的值 进行判断
inline bool Bounds3::IntersectP(const Ray& ray, const Vector3f& invDir, const std::array<int, 3>& dirIsNeg) const
{
// invDir: ray direction(x,y,z), invDir=(1.0/x,1.0/y,1.0/z), use this because Multiply is faster that Division
// dirIsNeg: ray direction(x,y,z), dirIsNeg=[int(x>0),int(y>0),int(z>0)], use this to simplify your logic
// TODO test if ray bound intersects
float t_Min_x = (pMin.x - ray.origin.x) * invDir[0]; // 乘以每个方向的权重
float t_Min_y = (pMin.y - ray.origin.y) * invDir[1]; // 于每一组平面都需要分别计算一个最小时间和最大时间,代入公式即可,
// 这里的invDir分别记录了光线传播沿xyz方向的倒数,便于计算公式中的 “÷某一传播方向” 。
float t_Min_z = (pMin.z - ray.origin.z) * invDir[2]; // pMix.x .y .z都相当于一个平面d
float t_Max_x = (pMax.x - ray.origin.x) * invDir[0];
float t_Max_y = (pMax.y - ray.origin.y) * invDir[1];
float t_Max_z = (pMax.z - ray.origin.z) * invDir[2];
if (!dirIsNeg[0]) // 判断如果为负数的话,那就改变方向交换最大最小值。
{
float t = t_Min_x;
t_Min_x = t_Max_x;
t_Max_x = t;
}
if (!dirIsNeg[1])
{
float t = t_Min_y;
t_Min_y = t_Max_y;
t_Max_y = t;
}
if (!dirIsNeg[2])
{
float t = t_Min_z;
t_Min_z = t_Max_z;
t_Max_z = t;
}
float t_enter = std::max(t_Min_x, std::max(t_Min_y, t_Min_z)); //找到进盒子的最大值
float t_exit = std::min(t_Max_x, std::min(t_Max_y, t_Max_z)); //找到出玻璃盒的最小值
if (t_enter <= t_exit && t_exit >= 0) // 判断必要条件
return true;
else
return false;
}
3. 层次包围盒BVH加速
1. 前述问题
如果三角形的面特别多,那么用Moller Trumenbore算法进行计算光线与三角形相交的计算就会变慢许多。因此我们采用包围盒的形式,先进行一个初步判断。以用来加速算法
建立网格的目的:
- 通过网格可以判断有tmin,tmax
- 若有 则对遍历到的网格测试与其有的交点
- 网格密度一般认为是27x物体数量
- 主要分类: Oct-Tree 八叉树 KD-Tree(原来用的多) BSP-Tree
由于KD树的一些问题:
- 难以判断物体与包围盒边界的相交问题。
- 一个物体容易相对穿过多个包围盒被重复计算影响性能。
- KD数的应用场景越来越小。
- 因此我们使用新的更加广泛的包围盒算法(BVH)进行加速
2. BVH层次包围盒
BVH的特点:
- 按照三角形进行划分,一个三角形只可能出现在一个包围盒内,但是不同包围盒之间可能有相交
- 思想像分组,只对三角形较多的组进行递归分组
- 每次划分都选择XYZ最长的轴进行划分,这样划分比较均匀
- 总选择中间的三角形进行划分,因此划分结果接近平衡二叉树
- 划分到一个比较小的数量后停止继续划分(比如5个三角形)
在看函数实现之前我们可以看一下
Intersecton的结构体:如下结构体,关键的属性值即为
happened(是否相交),coords(交点坐标),normal(交点所在平面法线),distance(光线起点到交点的距离),obj(交点所在物体的物体类型),m(交点所在物体的材料类型)。depth类似于“视深”,在后续的代码中对于可以反光的材质如会发生反射、折射或者透明的材质,会继续递归调用castRay并且把depth+1,而在最初又规定了可处理的depth的最大深度,这里认为反映了一个像素已反射其他像素的次数,即当前的光线是第几层次的间接光源,程序设定的最大depth为5,故一个像素点最多能显示五次光线反射的效果。
struct Intersection { Intersection(){ happened=false; coords=Vector3f(); normal=Vector3f(); distance= std::numeric_limits<double>::max(); obj =nullptr; m=nullptr; } bool happened; Vector3f coords; Vector3f normal; double distance; Object* obj; Material* m; };实现代码:
思路描述:
先判断是否与当前判断的盒子边界是否与光线相交,若无交点则判断结束返回;
若当前节点有物体,则判断是否有物体和光线相交,有相交,则进一步判断物体和光线的交点;
前两个判断完毕: 满足 1. 当前节点的盒子跟光线有相交 2. 当前节点的盒子里面没有物体, 因此需要判断大盒子的细分节点 左右两个小盒子;
循环递归判断左右节点重复上述步骤,最终返回与物体交点更近的
IntersectionIntersection BVHAccel::Intersect(const Ray& ray) const // in BVH.cpp { Intersection isect; if (!root) return isect; isect = BVHAccel::getIntersection(root, ray); return isect; } Intersection BVHAccel::getIntersection(BVHBuildNode* node, const Ray& ray) const // in BVH.cpp { Intersection isect; // TODO Traverse the BVH to find intersection if (!node->bounds.IntersectP(ray, ray.direction_inv, std::array<int, 3> {ray.direction.x > 0, ray.direction.y > 0, ray.direction.z > 0})) return isect; if (node->object != nullptr) return node->object->getIntersection(ray); Intersection isect_left, isect_right; isect_left = getIntersection(node->left, ray); isect_right = getIntersection(node->right, ray); return isect_left.distance <= isect_right.distance ? isect_left : isect_right; } Intersection Scene::intersect(const Ray &ray) const //in Scene.cpp { // TO DO Use BVH.cpp's Intersect function instead of the current return this->bvh->Intersect(ray); }
4. 最终渲染函数 Render() && castRay()
1. Render()函数
Render() :计算像素着色 生成图像,根据像素点,生成光线,再用生成的光线进行判断,找到交点,返回最近的颜色。 (然后根据计算出来的交点,通过反射折射继续不断递归计算)
在遍历所有像素的循环里,生成对应的光线并 将返回的颜色保存在帧缓冲区( framebuffer) 中。在渲染过程结束后,帧缓冲区中的信息将被保存为图像
void Renderer::Render(const Scene& scene) { std::vector<Vector3f> framebuffer(scene.width * scene.height); // 在遍历所有像素的循环里,生成对应的光线并将返回的颜色保存在帧缓冲区( framebuffer)中 float scale = std::tan(deg2rad(scene.fov * 0.5f)); float imageAspectRatio = scene.width / (float)scene.height; // imageAspectRatio即宽高比,是原本scene的宽高比,所以要想恢复原始的比例需要用 宽 * 宽高比,即 x * imageAspectRatio。 // Use this variable as the eye position to start your rays. Vector3f eye_pos(0); int m = 0; for (int j = 0; j < scene.height; ++j) { for (int i = 0; i < scene.width; ++i) { // generate primary ray direction float x ; x = (2 * ((float)i + 0.5) / scene.width - 1) * imageAspectRatio * scale ; float y; y = (1.0 - 2 * ((float)j + 0.5) / scene.height) * scale; // TODO: Find the x and y positions of the current pixel to get the direction // vector that passes through it. // Also, don't forget to multiply both of them with the variable *scale*, and // x (horizontal) variable with the *imageAspectRatio* Vector3f dir = normalize(Vector3f(x, y, -1)); // Don't forget to normalize this direction! framebuffer[m++] = castRay(eye_pos, dir, scene, 0); // 该函数调用 trace 来查询光线与场景中最近的对象的交点 castRay返回该像素点的颜色,并存入缓冲区里 } UpdateProgress(j / (float)scene.height); } // save framebuffer to file FILE * fp = fopen("binary.ppm", "wb"); (void)fprintf(fp, "P6\n%d %d\n255\n", scene.width, scene.height); for (auto i = 0; i < scene.height * scene.width; ++i) { static unsigned char color[3]; color[0] = (char)(255 * clamp(0, 1, framebuffer[i].x)); color[1] = (char)(255 * clamp(0, 1, framebuffer[i].y)); color[2] = (char)(255 * clamp(0, 1, framebuffer[i].z)); fwrite(color, 1, 3, fp); } fclose(fp); }

2. castRay()函数
// Implementation of Path Tracing
Vector3f Scene::castRay(const Ray& ray, int depth) const
{
// TO DO Implement Path Tracing Algorithm here
Intersection intersection = Scene::intersect(ray); //先得到相交的点
if (intersection.happened) {
Vector3f hitPoint = intersection.coords;
Vector3f N = intersection.normal; // normal
Material* m = intersection.m;
Vector3f L_dir(0.0), L_indir(0.0);
// Uniformly sample the light at x (pdf_light = 1 / A)
Intersection intersection_light;
float pdf_light;
sampleLight(intersection_light, pdf_light);
// Shoot a ray from p to x
Vector3f dir_p_x = (intersection_light.coords - hitPoint).normalized();
Ray ray_p_x(hitPoint + EPSILON * N, dir_p_x);
Intersection intersection_p_x = Scene::intersect(ray_p_x);
if (intersection_p_x.happened && intersection_p_x.m->hasEmission()) {
Vector3f NN = intersection_p_x.normal;
L_dir = intersection_p_x.m->m_emission * m->eval(ray.direction, dir_p_x, N) * dotProduct(dir_p_x, N) * dotProduct(-dir_p_x, NN) / intersection_p_x.distance / pdf_light;
}
if (get_random_float() <= RussianRoulette) {
// Trace a ray r(p, wi)
Vector3f dir_i = m->sample(ray.direction, N).normalized();
Ray ray_p_diri(hitPoint, dir_i);
Intersection intersection_p_diri = Scene::intersect(ray_p_diri);
if (intersection_p_diri.happened && !intersection_p_diri.m->hasEmission()) {
L_indir = castRay(ray_p_diri, depth + 1) * m->eval(ray.direction, dir_i, N) * dotProduct(dir_i, N) / m->pdf(ray.direction, dir_i, N) / RussianRoulette;
}
}
return m->getEmission() + L_dir + L_indir;
}
else {
return Vector3f(0, 0, 0);
}
}
5. Debug处理
1. fopen函数
3.右键项目------->Properties(属性)------->Configuration Properties(配置属性)------>C/C++ ------>Preprocessor(预处理器)------->Preprocessor Difinitions (预处理器定义) 添加 _CRT_SECURE_NO_WARNINGS 之后点击OK。最后 应用------>确定。具体操作如下。
原文链接:https://blog.csdn.net/join_yuan/article/details/105629292

2. C2039 “optional“: 不是 “std“ 的成员
std::optional 需要C++17.
Visual Studio:
项目 -> 属性 -> C/C++ -> 所有选项 -> 附加选项,增加:/std:c++17
gcc/clang:
添加-std=c++17
6. games101的一些前置作业:
下面是我做的一些games101的一些前置作业用以过渡
games101作业五
历史作业可以参考 作业七
在这次作业中,我们需要实现两个部分:光线的生成和光线与三角的相交。
std::optional<hit_payload> trace(const Vector3f &orig, const Vector3f &dir,const std::vector<std::unique_ptr<Object> > &objects)
{
float tNear = kInfinity;
std::optional<hit_payload> payload;
for (const auto & object : objects)
{
float tNearK = kInfinity;
uint32_t indexK;
Vector2f uvK;
if (object->intersect(orig, dir, tNearK, indexK, uvK) && tNearK < tNear)
{
payload.emplace();
payload->hit_obj = object.get();
payload->tNear = tNearK;
payload->index = indexK;
payload->uv = uvK;
tNear = tNearK;
}
}
return payload;
}
Vector3f castRay(const Vector3f &orig, const Vector3f &dir, const Scene& scene,int depth)
{
if (depth > scene.maxDepth) {
return Vector3f(0.0,0.0,0.0);
}
Vector3f hitColor = scene.backgroundColor;
if (auto payload = trace(orig, dir, scene.get_objects()); payload)
{
Vector3f hitPoint = orig + dir * payload->tNear;
Vector3f N; // normal
Vector2f st; // st coordinates
payload->hit_obj->getSurfaceProperties(hitPoint, dir, payload->index, payload->uv, N, st);
switch (payload->hit_obj->materialType) {
case REFLECTION_AND_REFRACTION:
{
Vector3f reflectionDirection = normalize(reflect(dir, N));
Vector3f refractionDirection = normalize(refract(dir, N, payload->hit_obj->ior));
Vector3f reflectionRayOrig = (dotProduct(reflectionDirection, N) < 0) ?
hitPoint - N * scene.epsilon :
hitPoint + N * scene.epsilon;
Vector3f refractionRayOrig = (dotProduct(refractionDirection, N) < 0) ?
hitPoint - N * scene.epsilon :
hitPoint + N * scene.epsilon;
Vector3f reflectionColor = castRay(reflectionRayOrig, reflectionDirection, scene, depth + 1);
Vector3f refractionColor = castRay(refractionRayOrig, refractionDirection, scene, depth + 1);
float kr = fresnel(dir, N, payload->hit_obj->ior);
hitColor = reflectionColor * kr + refractionColor * (1 - kr);
break;
}
case REFLECTION:
{
float kr = fresnel(dir, N, payload->hit_obj->ior);
Vector3f reflectionDirection = reflect(dir, N);
Vector3f reflectionRayOrig = (dotProduct(reflectionDirection, N) < 0) ?
hitPoint + N * scene.epsilon :
hitPoint - N * scene.epsilon;
hitColor = castRay(reflectionRayOrig, reflectionDirection, scene, depth + 1) * kr;
break;
}
default:
{
Vector3f lightAmt = 0, specularColor = 0;
Vector3f shadowPointOrig = (dotProduct(dir, N) < 0) ?
hitPoint + N * scene.epsilon :
hitPoint - N * scene.epsilon;
for (auto& light : scene.get_lights()) {
Vector3f lightDir = light->position - hitPoint;
// square of the distance between hitPoint and the light
float lightDistance2 = dotProduct(lightDir, lightDir);
lightDir = normalize(lightDir);
float LdotN = std::max(0.f, dotProduct(lightDir, N));
// is the point in shadow, and is the nearest occluding object closer to the object than the light itself?
auto shadow_res = trace(shadowPointOrig, lightDir, scene.get_objects());
bool inShadow = shadow_res && (shadow_res->tNear * shadow_res->tNear < lightDistance2);
lightAmt += inShadow ? 0 : light->intensity * LdotN;
Vector3f reflectionDirection = reflect(-lightDir, N);
specularColor += powf(std::max(0.f, -dotProduct(reflectionDirection, dir)),
payload->hit_obj->specularExponent) * light->intensity;
}
hitColor = lightAmt * payload->hit_obj->evalDiffuseColor(st) * payload->hit_obj->Kd + specularColor * payload->hit_obj->Ks;
break;
}
}
}
return hitColor;
}
void Renderer::Render(const Scene& scene)
{
std::vector<Vector3f> framebuffer(scene.width * scene.height);
// 在遍历所有像素的循环里,生成对应的光线并将返回的颜色保存在帧缓冲区( framebuffer)中
float scale = std::tan(deg2rad(scene.fov * 0.5f));
float imageAspectRatio = scene.width / (float)scene.height;
// imageAspectRatio即宽高比,是原本scene的宽高比,所以要想恢复原始的比例需要用 宽 * 宽高比,即 x * imageAspectRatio。
// Use this variable as the eye position to start your rays.
Vector3f eye_pos(0);
int m = 0;
for (int j = 0; j < scene.height; ++j)
{
for (int i = 0; i < scene.width; ++i)
{
// generate primary ray direction
float x ;
x = (2 * ((float)i + 0.5) / scene.width - 1) * imageAspectRatio * scale ;
float y;
y = (1.0 - 2 * ((float)j + 0.5) / scene.height) * scale;
// TODO: Find the x and y positions of the current pixel to get the direction
// vector that passes through it.
// Also, don't forget to multiply both of them with the variable *scale*, and
// x (horizontal) variable with the *imageAspectRatio*
Vector3f dir = normalize(Vector3f(x, y, -1)); // Don't forget to normalize this direction!
framebuffer[m++] = castRay(eye_pos, dir, scene, 0);
}
UpdateProgress(j / (float)scene.height);
}
// save framebuffer to file
FILE * fp = fopen("binary.ppm", "wb");
(void)fprintf(fp, "P6\n%d %d\n255\n", scene.width, scene.height);
for (auto i = 0; i < scene.height * scene.width; ++i) {
static unsigned char color[3];
color[0] = (char)(255 * clamp(0, 1, framebuffer[i].x));
color[1] = (char)(255 * clamp(0, 1, framebuffer[i].y));
color[2] = (char)(255 * clamp(0, 1, framebuffer[i].z));
fwrite(color, 1, 3, fp);
}
fclose(fp);
}
三角形库
#pragma once
#include "Object.hpp"
#include games101作业六
重点关注物体 划分算法 Bounding Volume Hierarchy (BVH)。
实现 Ray-Bounding Volume 求交与 BVH 查找。
depth类似于“视深”,在后续的代码中对于可以反光的材质如会发生反射、折射或者透明的材质,会继续递归调用castRay并且把depth+1,而在最初又规定了可处理的depth的最大深度,这里认为反映了一个像素已反射其他像素的次数,即当前的光线是第几层次的间接光源,程序设定的最大depth为5,故一个像素点最多能显示五次光线反射的效果。
struct Intersection
{
Intersection(){
happened=false;
coords=Vector3f();
normal=Vector3f();
distance= std::numeric_limits<double>::max();
obj =nullptr;
m=nullptr;
}
bool happened;
Vector3f coords;
Vector3f normal;
double distance;
Object* obj;
Material* m;
};
如上,关键的属性值即为happened(是否相交),coords(交点坐标),normal(交点所在平面法线),distance(光线起点到交点的距离),obj(交点所在物体的物体类型),m(交点所在物体的材料类型)。
games101作业七
