LV.12 D12 GPIO实验 学习笔记
一、GPIO简介
GPIO(General-purpose input/output)即通用型输入输出,GPIO可以控制连接在其之上的引脚实现信号的输入和输出
芯片的引脚与外部设备相连,从而实现与外部硬件设备的通讯、控制及信号采集等功能
实验步骤
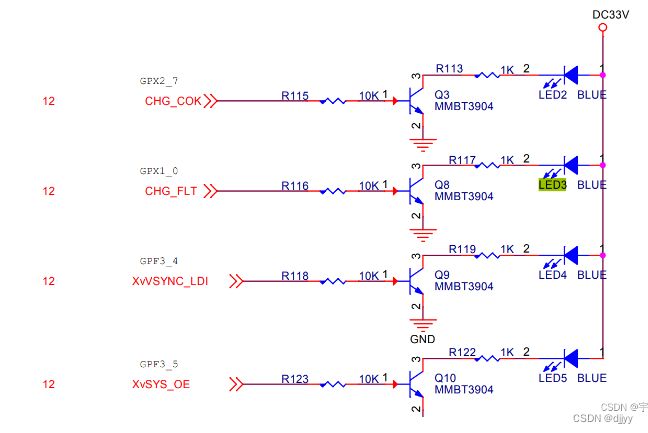
1. 通过电路原理图分析LED的控制逻辑
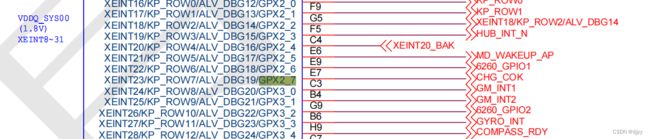
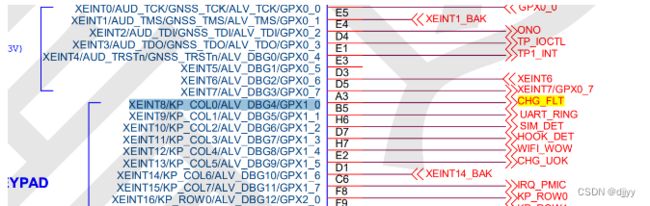
2. 通过电路原理图查找LED与Exynos4412的连接关系
3. 通过数据手册分析GPIO中哪些寄存器可以控制LED
4. 通过程序去操控对应的寄存器完成对LED的控制
二、GPIO寄存器分析
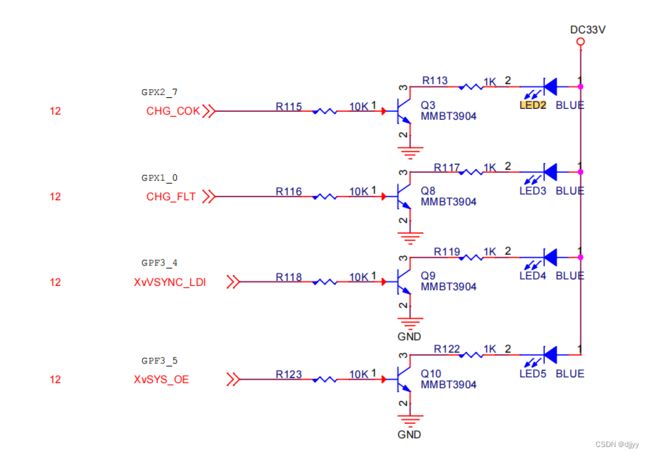
高电平导通,低电平截止


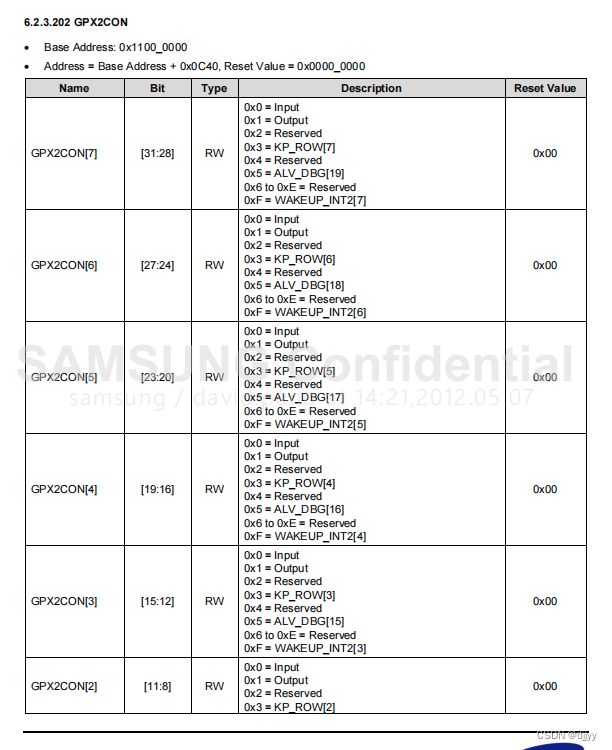
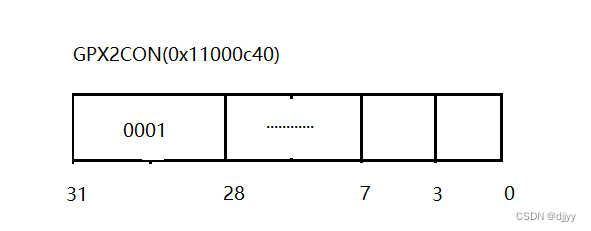
该实验需要输出,所以就是Output模式,GPX2CON[7] = 0x1

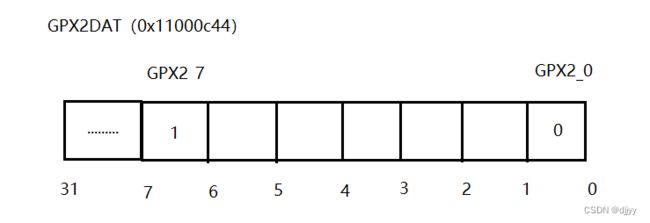
输出高电平就对应位写1,输出低电平就对应位写0
三、GPIO编程
预处理->编译->汇编->链接
gcc -E
gcc -S
gcc -c
gcc
链接使用的工具是ld,objcopy是对可执行文件进行转化
.elf是Linux可执行文件的后缀
-Ttext 0x40005000 是将程序放到内存上,保证程序可以执行。
led-asm.s:
.text
_start:
LED_CONFIG:
LDR R2, =0x11000c40
LDR R1, =0x10000000
STR R1, [R2]
LED_ON:
LDR R2, =0x11000c44
LDR R1, =0x00000080
STR R1, [R2]
B STOP
LED_OFF:
LDR R2, =0x11000c44
LDR R1, =0x00000000
STR R1, [R2]
STOP:
B STOP
.end
Makefile:
TARGET = led-asm
CROSS_COMPILE = arm-none-linux-gnueabi-
CC = $(CROSS_COMPILE)gcc
LD = $(CROSS_COMPILE)ld
OBJCOPY = $(CROSS_COMPILE)objcopy
all:
$(CC) -c $(TARGET).s -o $(TARGET).o
$(LD) $(TARGET).o -Ttext 0x40005000 -o $(TARGET).elf
$(OBJCOPY) -O binary -S $(TARGET).elf $(TARGET).bin
clean:
rm $(TARGET).o $(TARGET).elf $(TARGET).bin然后通过共享文件夹吧编译好的.bin文件传给windows
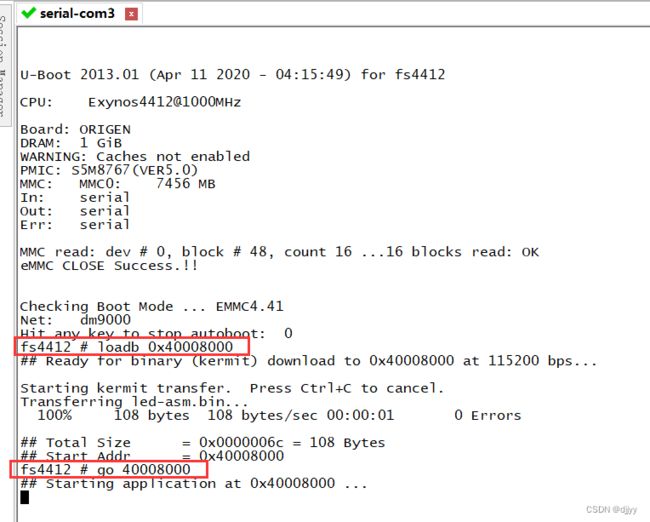
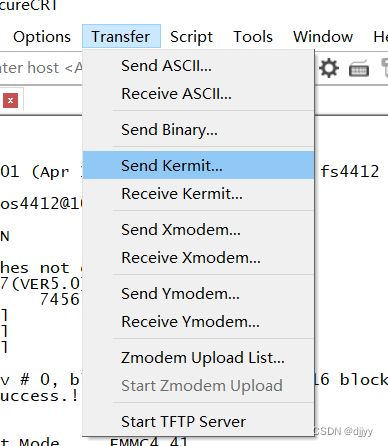
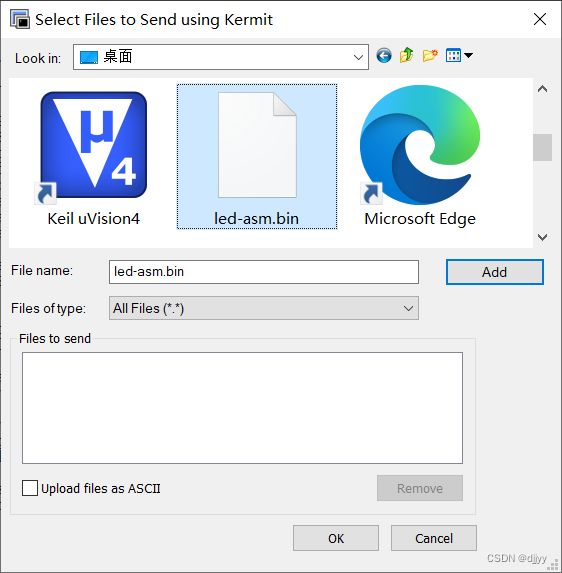
先输入loadb 0x40008000,把程序下载到0x40008000地址,然后发送Kermit协议的文件,选择led-asm.bin文件,然后输入go 0x40008000,跳转到0x40008000地址执行程序。led就会熄灭。
四、LED实验
写一个程序让LED2闪烁
.text
_start:
MAIN:
BL LED_CONFIG
LOOP:
BL LED_ON
BL DELAY
BL LED_OFF
BL DELAY
B LOOP
LED_CONFIG:
LDR R2, =0x11000c40
LDR R1, =0x10000000
STR R1, [R2]
MOV PC, LR
LED_ON:
LDR R2, =0x11000c44
LDR R1, =0x00000080
STR R1, [R2]
MOV PC, LR
LED_OFF:
LDR R2, =0x11000c44
LDR R1, =0x00000000
STR R1, [R2]
MOV PC, LR
DELAY:
LDR R1, =100000000
L:
SUB R1, R1, #1
CMP R1, #0
BNE L
MOV PC, LR
STOP:
B STOP
.end再写一个让LED3闪烁


 让LED3闪烁的程序如下:
让LED3闪烁的程序如下:
.text
_start:
MAIN:
BL LED_CONFIG
LOOP:
BL LED_ON
BL DELAY
BL LED_OFF
BL DELAY
B LOOP
LED_CONFIG:
LDR R2, =0x11000c20
LDR R1, =0x00000001
STR R1, [R2]
MOV PC, LR
LED_ON:
LDR R2, =0x11000c24
LDR R1, =0x00000001
STR R1, [R2]
MOV PC, LR
LED_OFF:
LDR R2, =0x11000c24
LDR R1, =0x00000000
STR R1, [R2]
MOV PC, LR
DELAY:
LDR R1, =100000000
L:
SUB R1, R1, #1
CMP R1, #0
BNE L
MOV PC, LR
STOP:
B STOP
.end