【第3次实验】卷积神经网络
卷积神经网络
文章目录
- 卷积神经网络
-
- 1.MNIST 数据集分类
- 2.CIFAR10数据分类
- 3.使用 VGG16 对 CIFAR10 分类
1.MNIST 数据集分类
构建简单的CNN对 mnist 数据集进行分类。同时,还会在实验中学习池化与卷积操作的基本作用。
深度卷积神经网络中,有如下特性
- 很多层: compositionality
- 卷积: locality + stationarity of images
- 池化: Invariance of object class to translations
代码过程:
- 引入库
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torchvision import datasets, transforms
import matplotlib.pyplot as plt
import numpy
# 一个函数,用来计算模型中有多少参数
def get_n_params(model):
np=0
for p in list(model.parameters()):
np += p.nelement()
return np
# 使用GPU训练,可以在菜单 "代码执行工具" -> "更改运行时类型" 里进行设置
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
- 加载数据 (MNIST)
PyTorch里包含了 MNIST, CIFAR10 等常用数据集,调用 torchvision.datasets 即可把这些数据由远程下载到本地,下面给出MNIST的使用方法:
torchvision.datasets.MNIST(root, train=True, transform=None, target_transform=None, download=False)
- root 为数据集下载到本地后的根目录,包括 training.pt 和 test.pt 文件
- train,如果设置为True,从training.pt创建数据集,否则从test.pt创建。
- download,如果设置为True, 从互联网下载数据并放到root文件夹下
- transform, 一种函数或变换,输入PIL图片,返回变换之后的数据。
- target_transform 一种函数或变换,输入目标,进行变换。
另外值得注意的是,DataLoader是一个比较重要的类,提供的常用操作有:batch_size(每个batch的大小), shuffle(是否进行随机打乱顺序的操作), num_workers(加载数据的时候使用几个子进程)
input_size = 28*28 # MNIST上的图像尺寸是 28x28
output_size = 10 # 类别为 0 到 9 的数字,因此为十类
train_loader = torch.utils.data.DataLoader(
datasets.MNIST('./data', train=True, download=True,
transform=transforms.Compose(
[transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))])),
batch_size=64, shuffle=True)
test_loader = torch.utils.data.DataLoader(
datasets.MNIST('./data', train=False, transform=transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))])),
batch_size=1000, shuffle=True)
plt.figure(figsize=(8, 5))
for i in range(20):
plt.subplot(4, 5, i + 1)
image, _ = train_loader.dataset.__getitem__(i)
plt.imshow(image.squeeze().numpy(),'gray')
plt.axis('off');
Downloading http://yann.lecun.com/exdb/mnist/train-images-idx3-ubyte.gz
Downloading http://yann.lecun.com/exdb/mnist/train-images-idx3-ubyte.gz to ./data/MNIST/raw/train-images-idx3-ubyte.gz
9913344/? [00:00<00:00, 47589970.48it/s]
Extracting ./data/MNIST/raw/train-images-idx3-ubyte.gz to ./data/MNIST/raw
Downloading http://yann.lecun.com/exdb/mnist/train-labels-idx1-ubyte.gz
Downloading http://yann.lecun.com/exdb/mnist/train-labels-idx1-ubyte.gz to ./data/MNIST/raw/train-labels-idx1-ubyte.gz
29696/? [00:00<00:00, 658364.75it/s]
Extracting ./data/MNIST/raw/train-labels-idx1-ubyte.gz to ./data/MNIST/raw
Downloading http://yann.lecun.com/exdb/mnist/t10k-images-idx3-ubyte.gz
Downloading http://yann.lecun.com/exdb/mnist/t10k-images-idx3-ubyte.gz to ./data/MNIST/raw/t10k-images-idx3-ubyte.gz
1649664/? [00:00<00:00, 8994310.62it/s]
Extracting ./data/MNIST/raw/t10k-images-idx3-ubyte.gz to ./data/MNIST/raw
Downloading http://yann.lecun.com/exdb/mnist/t10k-labels-idx1-ubyte.gz
Downloading http://yann.lecun.com/exdb/mnist/t10k-labels-idx1-ubyte.gz to ./data/MNIST/raw/t10k-labels-idx1-ubyte.gz
5120/? [00:00<00:00, 116450.95it/s]
Extracting ./data/MNIST/raw/t10k-labels-idx1-ubyte.gz to ./data/MNIST/raw
/usr/local/lib/python3.7/dist-packages/torchvision/datasets/mnist.py:498: UserWarning: The given NumPy array is not writeable, and PyTorch does not support non-writeable tensors. This means you can write to the underlying (supposedly non-writeable) NumPy array using the tensor. You may want to copy the array to protect its data or make it writeable before converting it to a tensor. This type of warning will be suppressed for the rest of this program. (Triggered internally at /pytorch/torch/csrc/utils/tensor_numpy.cpp:180.)
return torch.from_numpy(parsed.astype(m[2], copy=False)).view(*s)
- 创建网络
定义网络时,需要继承nn.Module,并实现它的forward方法,把网络中具有可学习参数的层放在构造函数init中。
只要在nn.Module的子类中定义了forward函数,backward函数就会自动被实现(利用autograd)。
class FC2Layer(nn.Module):
def __init__(self, input_size, n_hidden, output_size):
# nn.Module子类的函数必须在构造函数中执行父类的构造函数
# 下式等价于nn.Module.__init__(self)
super(FC2Layer, self).__init__()
self.input_size = input_size
# 这里直接用 Sequential 就定义了网络,注意要和下面 CNN 的代码区分开
self.network = nn.Sequential(
nn.Linear(input_size, n_hidden),
nn.ReLU(),
nn.Linear(n_hidden, n_hidden),
nn.ReLU(),
nn.Linear(n_hidden, output_size),
nn.LogSoftmax(dim=1)
)
def forward(self, x):
# view一般出现在model类的forward函数中,用于改变输入或输出的形状
# x.view(-1, self.input_size) 的意思是多维的数据展成二维
# 代码指定二维数据的列数为 input_size=784,行数 -1 表示我们不想算,电脑会自己计算对应的数字
# 在 DataLoader 部分,我们可以看到 batch_size 是64,所以得到 x 的行数是64
# 大家可以加一行代码:print(x.cpu().numpy().shape)
# 训练过程中,就会看到 (64, 784) 的输出,和我们的预期是一致的
# forward 函数的作用是,指定网络的运行过程,这个全连接网络可能看不啥意义,
# 下面的CNN网络可以看出 forward 的作用。
x = x.view(-1, self.input_size)
return self.network(x)
class CNN(nn.Module):
def __init__(self, input_size, n_feature, output_size):
# 执行父类的构造函数,所有的网络都要这么写
super(CNN, self).__init__()
# 下面是网络里典型结构的一些定义,一般就是卷积和全连接
# 池化、ReLU一类的不用在这里定义
self.n_feature = n_feature
self.conv1 = nn.Conv2d(in_channels=1, out_channels=n_feature, kernel_size=5)
self.conv2 = nn.Conv2d(n_feature, n_feature, kernel_size=5)
self.fc1 = nn.Linear(n_feature*4*4, 50)
self.fc2 = nn.Linear(50, 10)
# 下面的 forward 函数,定义了网络的结构,按照一定顺序,把上面构建的一些结构组织起来
# 意思就是,conv1, conv2 等等的,可以多次重用
def forward(self, x, verbose=False):
x = self.conv1(x)
x = F.relu(x)
x = F.max_pool2d(x, kernel_size=2)
x = self.conv2(x)
x = F.relu(x)
x = F.max_pool2d(x, kernel_size=2)
x = x.view(-1, self.n_feature*4*4)
x = self.fc1(x)
x = F.relu(x)
x = self.fc2(x)
x = F.log_softmax(x, dim=1)
return x
定义训练和测试函数
# 训练函数
def train(model):
model.train()
# 主里从train_loader里,64个样本一个batch为单位提取样本进行训练
for batch_idx, (data, target) in enumerate(train_loader):
# 把数据送到GPU中
data, target = data.to(device), target.to(device)
optimizer.zero_grad()
output = model(data)
loss = F.nll_loss(output, target)
loss.backward()
optimizer.step()
if batch_idx % 100 == 0:
print('Train: [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
batch_idx * len(data), len(train_loader.dataset),
100. * batch_idx / len(train_loader), loss.item()))
def test(model):
model.eval()
test_loss = 0
correct = 0
for data, target in test_loader:
# 把数据送到GPU中
data, target = data.to(device), target.to(device)
# 把数据送入模型,得到预测结果
output = model(data)
# 计算本次batch的损失,并加到 test_loss 中
test_loss += F.nll_loss(output, target, reduction='sum').item()
# get the index of the max log-probability,最后一层输出10个数,
# 值最大的那个即对应着分类结果,然后把分类结果保存在 pred 里
pred = output.data.max(1, keepdim=True)[1]
# 将 pred 与 target 相比,得到正确预测结果的数量,并加到 correct 中
# 这里需要注意一下 view_as ,意思是把 target 变成维度和 pred 一样的意思
correct += pred.eq(target.data.view_as(pred)).cpu().sum().item()
test_loss /= len(test_loader.dataset)
accuracy = 100. * correct / len(test_loader.dataset)
print('\nTest set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n'.format(
test_loss, correct, len(test_loader.dataset),
accuracy))
- 在小型全连接网络上训练(Fully-connected network)
n_hidden = 8 # number of hidden units
model_fnn = FC2Layer(input_size, n_hidden, output_size)
model_fnn.to(device)
optimizer = optim.SGD(model_fnn.parameters(), lr=0.01, momentum=0.5)
print('Number of parameters: {}'.format(get_n_params(model_fnn)))
train(model_fnn)
test(model_fnn)
运行结果
Number of parameters: 6442
Train: [0/60000 (0%)] Loss: 2.293912
Train: [6400/60000 (11%)] Loss: 1.654353
Train: [12800/60000 (21%)] Loss: 1.149511
Train: [19200/60000 (32%)] Loss: 0.747604
Train: [25600/60000 (43%)] Loss: 0.874187
Train: [32000/60000 (53%)] Loss: 0.601633
Train: [38400/60000 (64%)] Loss: 0.479874
Train: [44800/60000 (75%)] Loss: 0.188910
Train: [51200/60000 (85%)] Loss: 0.542274
Train: [57600/60000 (96%)] Loss: 0.245706
Test set: Average loss: 0.4099, Accuracy: 8776/10000 (88%)
- 在卷积神经网络上训练
需要注意的是,上在定义的CNN和全连接网络,拥有相同数量的模型参数
# Training settings
n_features = 6 # number of feature maps
model_cnn = CNN(input_size, n_features, output_size)
model_cnn.to(device)
optimizer = optim.SGD(model_cnn.parameters(), lr=0.01, momentum=0.5)
print('Number of parameters: {}'.format(get_n_params(model_cnn)))
train(model_cnn)
test(model_cnn)
运行结果
Number of parameters: 6422
Train: [0/60000 (0%)] Loss: 2.299771
/usr/local/lib/python3.7/dist-packages/torch/nn/functional.py:718: UserWarning: Named tensors and all their associated APIs are an experimental feature and subject to change. Please do not use them for anything important until they are released as stable. (Triggered internally at /pytorch/c10/core/TensorImpl.h:1156.)
return torch.max_pool2d(input, kernel_size, stride, padding, dilation, ceil_mode)
Train: [6400/60000 (11%)] Loss: 2.205741
Train: [12800/60000 (21%)] Loss: 0.529737
Train: [19200/60000 (32%)] Loss: 0.419136
Train: [25600/60000 (43%)] Loss: 0.410910
Train: [32000/60000 (53%)] Loss: 0.269722
Train: [38400/60000 (64%)] Loss: 0.297657
Train: [44800/60000 (75%)] Loss: 0.202161
Train: [51200/60000 (85%)] Loss: 0.224796
Train: [57600/60000 (96%)] Loss: 0.132175
Test set: Average loss: 0.1583, Accuracy: 9517/10000 (95%)
通过上面的测试结果,可以发现,含有相同参数的 CNN 效果要明显优于 简单的全连接网络,是因为 CNN 能够更好的挖掘图像中的信息,主要通过两个手段:
- 卷积:Locality and stationarity in images
- 池化:Builds in some translation invariance
- 打乱像素顺序再次在两个网络上训练与测试
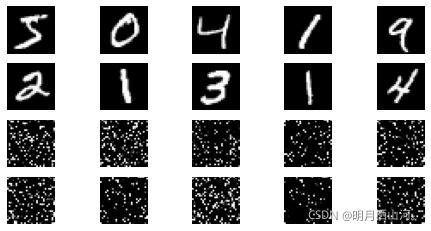
考虑到CNN在卷积与池化上的优良特性,如果我们把图像中的像素打乱顺序,这样 卷积 和 池化 就难以发挥作用了,为了验证这个想法,我们把图像中的像素打乱顺序再试试。
首先下面代码展示随机打乱像素顺序后,图像的形态:
# 这里解释一下 torch.randperm 函数,给定参数n,返回一个从0到n-1的随机整数排列
perm = torch.randperm(784)
plt.figure(figsize=(8, 4))
for i in range(10):
image, _ = train_loader.dataset.__getitem__(i)
# permute pixels
image_perm = image.view(-1, 28*28).clone()
image_perm = image_perm[:, perm]
image_perm = image_perm.view(-1, 1, 28, 28)
plt.subplot(4, 5, i + 1)
plt.imshow(image.squeeze().numpy(), 'gray')
plt.axis('off')
plt.subplot(4, 5, i + 11)
plt.imshow(image_perm.squeeze().numpy(), 'gray')
plt.axis('off')
重新定义训练与测试函数,我们写了两个函数 train_perm 和 test_perm,分别对应着加入像素打乱顺序的训练函数与测试函数。
与之前的训练与测试函数基本上完全相同,只是对 data 加入了打乱顺序操作。
在全连接网络上测试
perm = torch.randperm(784)
n_hidden = 8 # number of hidden units
model_fnn = FC2Layer(input_size, n_hidden, output_size)
model_fnn.to(device)
optimizer = optim.SGD(model_fnn.parameters(), lr=0.01, momentum=0.5)
print('Number of parameters: {}'.format(get_n_params(model_fnn)))
train_perm(model_fnn, perm)
test_perm(model_fnn, perm)
运行结果
Number of parameters: 6442
Train: [0/60000 (0%)] Loss: 2.326663
Train: [6400/60000 (11%)] Loss: 1.994924
Train: [12800/60000 (21%)] Loss: 1.676664
Train: [19200/60000 (32%)] Loss: 1.136867
Train: [25600/60000 (43%)] Loss: 0.700869
Train: [32000/60000 (53%)] Loss: 0.803411
Train: [38400/60000 (64%)] Loss: 0.510214
Train: [44800/60000 (75%)] Loss: 0.608723
Train: [51200/60000 (85%)] Loss: 0.668663
Train: [57600/60000 (96%)] Loss: 0.398532
Test set: Average loss: 0.5395, Accuracy: 8386/10000 (84%)
在卷积神经网络上测试
perm = torch.randperm(784)
n_features = 6 # number of feature maps
model_cnn = CNN(input_size, n_features, output_size)
model_cnn.to(device)
optimizer = optim.SGD(model_cnn.parameters(), lr=0.01, momentum=0.5)
print('Number of parameters: {}'.format(get_n_params(model_cnn)))
train_perm(model_cnn, perm)
test_perm(model_cnn, perm)
运行结果
Number of parameters: 6422
Train: [0/60000 (0%)] Loss: 2.299754
Train: [6400/60000 (11%)] Loss: 2.264622
Train: [12800/60000 (21%)] Loss: 2.161319
Train: [19200/60000 (32%)] Loss: 1.903410
Train: [25600/60000 (43%)] Loss: 1.121634
Train: [32000/60000 (53%)] Loss: 1.064046
Train: [38400/60000 (64%)] Loss: 0.838334
Train: [44800/60000 (75%)] Loss: 0.854761
Train: [51200/60000 (85%)] Loss: 0.487476
Train: [57600/60000 (96%)] Loss: 0.737010
Test set: Average loss: 0.5694, Accuracy: 8131/10000 (81%)
从打乱像素顺序的实验结果来看,全连接网络的性能基本上没有发生变化,但是 卷积神经网络的性能明显下降。
这是因为对于卷积神经网络,会利用像素的局部关系,但是打乱顺序以后,这些像素间的关系将无法得到利用。
2.CIFAR10数据分类
对于视觉数据,PyTorch 创建了一个叫做 totchvision 的包,该包含有支持加载类似Imagenet,CIFAR10,MNIST 等公共数据集的数据加载模块 torchvision.datasets 和支持加载图像数据数据转换模块 torch.utils.data.DataLoader。
下面将使用CIFAR10数据集,它包含十个类别:‘airplane’, ‘automobile’, ‘bird’, ‘cat’, ‘deer’, ‘dog’, ‘frog’, ‘horse’, ‘ship’, ‘truck’。CIFAR-10 中的图像尺寸为3x32x32,也就是RGB的3层颜色通道,每层通道内的尺寸为32*32。

测试源码
import torch
import torchvision
import torchvision.transforms as transforms
import matplotlib.pyplot as plt
import numpy as np
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
# 使用GPU训练,可以在菜单 "代码执行工具" -> "更改运行时类型" 里进行设置
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
transform = transforms.Compose(
[transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
# 注意下面代码中:训练的 shuffle 是 True,测试的 shuffle 是 false
# 训练时可以打乱顺序增加多样性,测试是没有必要
trainset = torchvision.datasets.CIFAR10(root='./data', train=True,
download=True, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=64,
shuffle=True, num_workers=2)
testset = torchvision.datasets.CIFAR10(root='./data', train=False,
download=True, transform=transform)
testloader = torch.utils.data.DataLoader(testset, batch_size=8,
shuffle=False, num_workers=2)
classes = ('plane', 'car', 'bird', 'cat',
'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
def imshow(img):
plt.figure(figsize=(8,8))
img = img / 2 + 0.5 # 转换到 [0,1] 之间
npimg = img.numpy()
plt.imshow(np.transpose(npimg, (1, 2, 0)))
plt.show()
# 得到一组图像
images, labels = iter(trainloader).next()
# 展示图像
imshow(torchvision.utils.make_grid(images))
# 展示第一行图像的标签
for j in range(8):
print(classes[labels[j]])
运行结果
Downloading https://www.cs.toronto.edu/~kriz/cifar-10-python.tar.gz to ./data/cifar-10-python.tar.gz
170499072/? [00:03<00:00, 53391061.16it/s]
Extracting ./data/cifar-10-python.tar.gz to ./data
Files already downloaded and verified

truck
deer
frog
car
truck
dog
ship
dog
接下来定义网络,损失函数和优化器:
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(3, 6, 5)
self.pool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(6, 16, 5)
self.fc1 = nn.Linear(16 * 5 * 5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = x.view(-1, 16 * 5 * 5)
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
# 网络放到GPU上
net = Net().to(device)
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(net.parameters(), lr=0.001)
for epoch in range(10): # 重复多轮训练
for i, (inputs, labels) in enumerate(trainloader):
inputs = inputs.to(device)
labels = labels.to(device)
# 优化器梯度归零
optimizer.zero_grad()
# 正向传播 + 反向传播 + 优化
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
# 输出统计信息
if i % 100 == 0:
print('Epoch: %d Minibatch: %5d loss: %.3f' %(epoch + 1, i + 1, loss.item()))
print('Finished Training')
运行结果
Epoch: 1 Minibatch: 1 loss: 2.298
Epoch: 1 Minibatch: 101 loss: 1.910
Epoch: 1 Minibatch: 201 loss: 1.837
Epoch: 1 Minibatch: 301 loss: 1.939
Epoch: 1 Minibatch: 401 loss: 1.450
Epoch: 1 Minibatch: 501 loss: 1.532
Epoch: 1 Minibatch: 601 loss: 1.667
Epoch: 1 Minibatch: 701 loss: 1.557
Epoch: 2 Minibatch: 1 loss: 1.556
Epoch: 2 Minibatch: 101 loss: 1.428
Epoch: 2 Minibatch: 201 loss: 1.471
Epoch: 2 Minibatch: 301 loss: 1.387
Epoch: 2 Minibatch: 401 loss: 1.466
Epoch: 2 Minibatch: 501 loss: 1.244
Epoch: 2 Minibatch: 601 loss: 1.135
Epoch: 2 Minibatch: 701 loss: 1.375
Epoch: 3 Minibatch: 1 loss: 1.147
Epoch: 3 Minibatch: 101 loss: 1.235
Epoch: 3 Minibatch: 201 loss: 1.405
Epoch: 3 Minibatch: 301 loss: 1.214
Epoch: 3 Minibatch: 401 loss: 1.104
Epoch: 3 Minibatch: 501 loss: 1.124
Epoch: 3 Minibatch: 601 loss: 1.158
Epoch: 3 Minibatch: 701 loss: 1.286
Epoch: 4 Minibatch: 1 loss: 0.993
Epoch: 4 Minibatch: 101 loss: 1.037
Epoch: 4 Minibatch: 201 loss: 1.076
Epoch: 4 Minibatch: 301 loss: 1.505
Epoch: 4 Minibatch: 401 loss: 1.124
Epoch: 4 Minibatch: 501 loss: 1.367
Epoch: 4 Minibatch: 601 loss: 1.028
Epoch: 4 Minibatch: 701 loss: 1.038
Epoch: 5 Minibatch: 1 loss: 1.137
Epoch: 5 Minibatch: 101 loss: 1.229
Epoch: 5 Minibatch: 201 loss: 1.093
Epoch: 5 Minibatch: 301 loss: 1.135
Epoch: 5 Minibatch: 401 loss: 1.085
Epoch: 5 Minibatch: 501 loss: 0.970
Epoch: 5 Minibatch: 601 loss: 1.162
Epoch: 5 Minibatch: 701 loss: 1.061
Epoch: 6 Minibatch: 1 loss: 0.965
Epoch: 6 Minibatch: 101 loss: 1.003
Epoch: 6 Minibatch: 201 loss: 1.009
Epoch: 6 Minibatch: 301 loss: 1.013
Epoch: 6 Minibatch: 401 loss: 0.912
Epoch: 6 Minibatch: 501 loss: 0.948
Epoch: 6 Minibatch: 601 loss: 0.858
Epoch: 6 Minibatch: 701 loss: 0.919
Epoch: 7 Minibatch: 1 loss: 1.154
Epoch: 7 Minibatch: 101 loss: 0.921
Epoch: 7 Minibatch: 201 loss: 1.006
Epoch: 7 Minibatch: 301 loss: 0.992
Epoch: 7 Minibatch: 401 loss: 1.190
Epoch: 7 Minibatch: 501 loss: 0.856
Epoch: 7 Minibatch: 601 loss: 0.805
Epoch: 7 Minibatch: 701 loss: 1.037
Epoch: 8 Minibatch: 1 loss: 0.619
Epoch: 8 Minibatch: 101 loss: 0.805
Epoch: 8 Minibatch: 201 loss: 1.089
Epoch: 8 Minibatch: 301 loss: 1.126
Epoch: 8 Minibatch: 401 loss: 1.033
Epoch: 8 Minibatch: 501 loss: 1.072
Epoch: 8 Minibatch: 601 loss: 0.877
Epoch: 8 Minibatch: 701 loss: 0.975
Epoch: 9 Minibatch: 1 loss: 0.882
Epoch: 9 Minibatch: 101 loss: 0.610
Epoch: 9 Minibatch: 201 loss: 1.207
Epoch: 9 Minibatch: 301 loss: 0.768
Epoch: 9 Minibatch: 401 loss: 0.902
Epoch: 9 Minibatch: 501 loss: 1.019
Epoch: 9 Minibatch: 601 loss: 0.985
Epoch: 9 Minibatch: 701 loss: 0.997
Epoch: 10 Minibatch: 1 loss: 1.035
Epoch: 10 Minibatch: 101 loss: 0.847
Epoch: 10 Minibatch: 201 loss: 0.819
Epoch: 10 Minibatch: 301 loss: 0.854
Epoch: 10 Minibatch: 401 loss: 0.715
Epoch: 10 Minibatch: 501 loss: 0.708
Epoch: 10 Minibatch: 601 loss: 0.684
Epoch: 10 Minibatch: 701 loss: 0.789
Finished Training
从测试集中取出8张图片并输入模型,测试CNN把这些图片识别成什么:
# 得到一组图像
images, labels = iter(testloader).next()
# 展示图像
imshow(torchvision.utils.make_grid(images))
# 展示图像的标签
for j in range(8):
print(classes[labels[j]])
outputs = net(images.to(device))
_, predicted = torch.max(outputs, 1)
# 展示预测的结果
for j in range(8):
print(classes[predicted[j]])

原始:
cat
ship
ship
plane
frog
frog
car
frog
测试后:
cat
ship
plane
ship
frog
frog
car
deer
检测在整个网络集上的表现:
correct = 0
total = 0
for data in testloader:
images, labels = data
images, labels = images.to(device), labels.to(device)
outputs = net(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy of the network on the 10000 test images: %d %%' % (
100 * correct / total))
运行结果
Accuracy of the network on the 10000 test images: 63 %
准确率还可以,通过改进网络结构,性能还可以进一步提升。
3.使用 VGG16 对 CIFAR10 分类
VGG是由Simonyan 和Zisserman在文献《Very Deep Convolutional Networks for Large Scale Image Recognition》中提出卷积神经网络模型,其名称来源于作者所在的牛津大学视觉几何组(Visual Geometry Group)的缩写。
该模型参加2014年的 ImageNet图像分类与定位挑战赛,取得了优异成绩:在分类任务上排名第二,在定位任务上排名第一。
- 定义 dataloader
这里的 transform,dataloader 和之前定义的有所不同。
代码
import torch
import torchvision
import torchvision.transforms as transforms
import matplotlib.pyplot as plt
import numpy as np
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
# 使用GPU训练,可以在菜单 "代码执行工具" -> "更改运行时类型" 里进行设置
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
transform_train = transforms.Compose([
transforms.RandomCrop(32, padding=4),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010))])
transform_test = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010))])
trainset = torchvision.datasets.CIFAR10(root='./data', train=True, download=True, transform=transform_train)
testset = torchvision.datasets.CIFAR10(root='./data', train=False, download=True, transform=transform_test)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=128, shuffle=True, num_workers=2)
testloader = torch.utils.data.DataLoader(testset, batch_size=128, shuffle=False, num_workers=2)
classes = ('plane', 'car', 'bird', 'cat',
'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
- VGG网络定义
模型实现代码:
class VGG(nn.Module):
def __init__(self):
super(VGG, self).__init__()
self.cfg = [64, 'M', 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M']
self.features = self._make_layers(cfg)
self.classifier = nn.Linear(2048, 10)
def forward(self, x):
out = self.features(x)
out = out.view(out.size(0), -1)
out = self.classifier(out)
return out
def _make_layers(self, cfg):
layers = []
in_channels = 3
for x in cfg:
if x == 'M':
layers += [nn.MaxPool2d(kernel_size=2, stride=2)]
else:
layers += [nn.Conv2d(in_channels, x, kernel_size=3, padding=1),
nn.BatchNorm2d(x),
nn.ReLU(inplace=True)]
in_channels = x
layers += [nn.AvgPool2d(kernel_size=1, stride=1)]
return nn.Sequential(*layers)
# 初始化网络,根据实际需要,修改分类层。因为 tiny-imagenet 是对200类图像分类,这里把输出修改为200。
# 网络放到GPU上
net = VGG().to(device)
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(net.parameters(), lr=0.001)
- 网络训练
for epoch in range(10): # 重复多轮训练
for i, (inputs, labels) in enumerate(trainloader):
inputs = inputs.to(device)
labels = labels.to(device)
# 优化器梯度归零
optimizer.zero_grad()
# 正向传播 + 反向传播 + 优化
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
# 输出统计信息
if i % 100 == 0:
print('Epoch: %d Minibatch: %5d loss: %.3f' %(epoch + 1, i + 1, loss.item()))
print('Finished Training')
问题:
NameError Traceback (most recent call last)
<ipython-input-2-f1f643d5b514> in <module>()
58
59 # 网络放到GPU上
---> 60 net = VGG().to(device)
61 criterion = nn.CrossEntropyLoss()
62 optimizer = optim.Adam(net.parameters(), lr=0.001)
<ipython-input-2-f1f643d5b514> in __init__(self)
34 super(VGG, self).__init__()
35 self.cfg = [64, 'M', 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M']
---> 36 self.features = self._make_layers(cfg)
37 self.classifier = nn.Linear(2048, 10)
38
NameError: name 'cfg' is not defined
将self.features = self._make_layers(cfg)改为self.features = self._make_layers(self.cfg)后,出现新报错:
CUDA error: CUBLAS_STATUS_INVALID_VALUE when calling `cublasSgemm( handle, opa, opb, m, n, k, &alpha, a, lda, b, ldb, &beta, c, ldc)`
网上查阅后得知,应该是self.classifier = nn.Linear(2048, 10)出现问题,应该为self.classifier = nn.Linear(512, 10).参考博客:
https://blog.csdn.net/xiaoxiaowantong/article/details/109689146
更改后可执行,运行结果如下
Files already downloaded and verified
Files already downloaded and verified
Epoch: 1 Minibatch: 1 loss: 2.647
Epoch: 1 Minibatch: 101 loss: 1.494
Epoch: 1 Minibatch: 201 loss: 1.205
Epoch: 1 Minibatch: 301 loss: 1.144
Epoch: 2 Minibatch: 1 loss: 0.847
Epoch: 2 Minibatch: 101 loss: 0.890
Epoch: 2 Minibatch: 201 loss: 0.920
Epoch: 2 Minibatch: 301 loss: 0.832
Epoch: 3 Minibatch: 1 loss: 0.839
Epoch: 3 Minibatch: 101 loss: 0.877
Epoch: 3 Minibatch: 201 loss: 0.727
Epoch: 3 Minibatch: 301 loss: 0.588
Epoch: 4 Minibatch: 1 loss: 0.744
Epoch: 4 Minibatch: 101 loss: 0.582
Epoch: 4 Minibatch: 201 loss: 0.563
Epoch: 4 Minibatch: 301 loss: 0.576
Epoch: 5 Minibatch: 1 loss: 0.622
Epoch: 5 Minibatch: 101 loss: 0.545
Epoch: 5 Minibatch: 201 loss: 0.413
Epoch: 5 Minibatch: 301 loss: 0.525
Epoch: 6 Minibatch: 1 loss: 0.493
Epoch: 6 Minibatch: 101 loss: 0.555
Epoch: 6 Minibatch: 201 loss: 0.548
Epoch: 6 Minibatch: 301 loss: 0.559
Epoch: 7 Minibatch: 1 loss: 0.414
Epoch: 7 Minibatch: 101 loss: 0.324
Epoch: 7 Minibatch: 201 loss: 0.653
Epoch: 7 Minibatch: 301 loss: 0.494
Epoch: 8 Minibatch: 1 loss: 0.338
Epoch: 8 Minibatch: 101 loss: 0.487
Epoch: 8 Minibatch: 201 loss: 0.526
Epoch: 8 Minibatch: 301 loss: 0.425
Epoch: 9 Minibatch: 1 loss: 0.343
Epoch: 9 Minibatch: 101 loss: 0.485
Epoch: 9 Minibatch: 201 loss: 0.367
Epoch: 9 Minibatch: 301 loss: 0.414
Epoch: 10 Minibatch: 1 loss: 0.507
Epoch: 10 Minibatch: 101 loss: 0.465
Epoch: 10 Minibatch: 201 loss: 0.414
Epoch: 10 Minibatch: 301 loss: 0.334
Finished Training
- 测试验证准确率:
correct = 0
total = 0
for data in testloader:
images, labels = data
images, labels = images.to(device), labels.to(device)
outputs = net(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy of the network on the 10000 test images: %.2f %%' % (
100 * correct / total))
执行结果
Accuracy of the network on the 10000 test images: 84.16 %
易得,使用一个简化版的VGG网络,准确率都能从63%提升至84.16%